1
Изобретение относится к машиностроению, в частности к роботостроению, и предназначено для автоматизации технологических процессов.
Известна рука манипулятора, содержащая корпус, привод выдвижения руки с выходным валом и зубчато-реечным механизмом, а также механизмом выборки люфта 1.
Однако известное устройство обладает недостаточным диапазоном эксплуатационных возможностей.
Цель изобретения - повышение эксплуатационных качеств.
Указанная цель достигается тем, что рука манипулятора,- содержащая корпус, привод выдвижения руки с выходным валом и зубчато-реечным механизмом выборки люфта, имеет выходной вал, выполненный полым, а .механизм выборки люфта выполнен в виде торсионного вала, расположенного в выходном валу, и снабжен дополнительной шестерней, установленной на одном конце торсионного вала и предназначенной для связи этого вала с зубчато-реечным {Механизмом, кроме того, другой конец торсионного вала
связан с выходным валом с возможностью регулировки их взаимного положения.
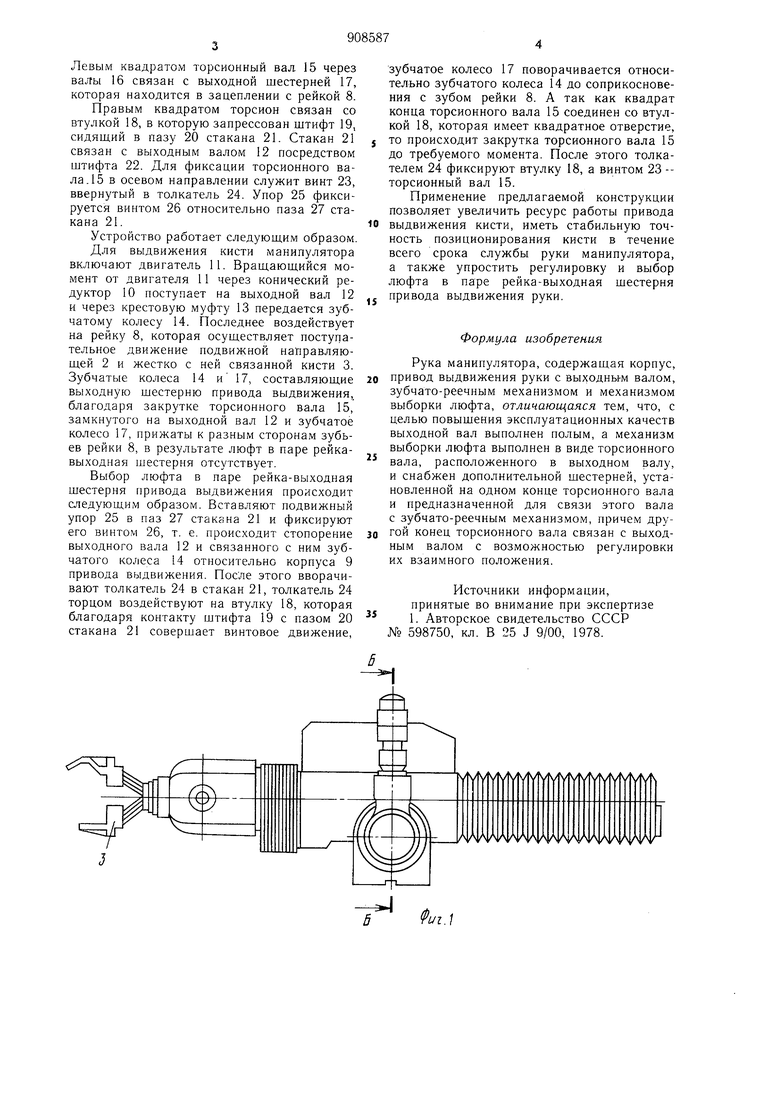
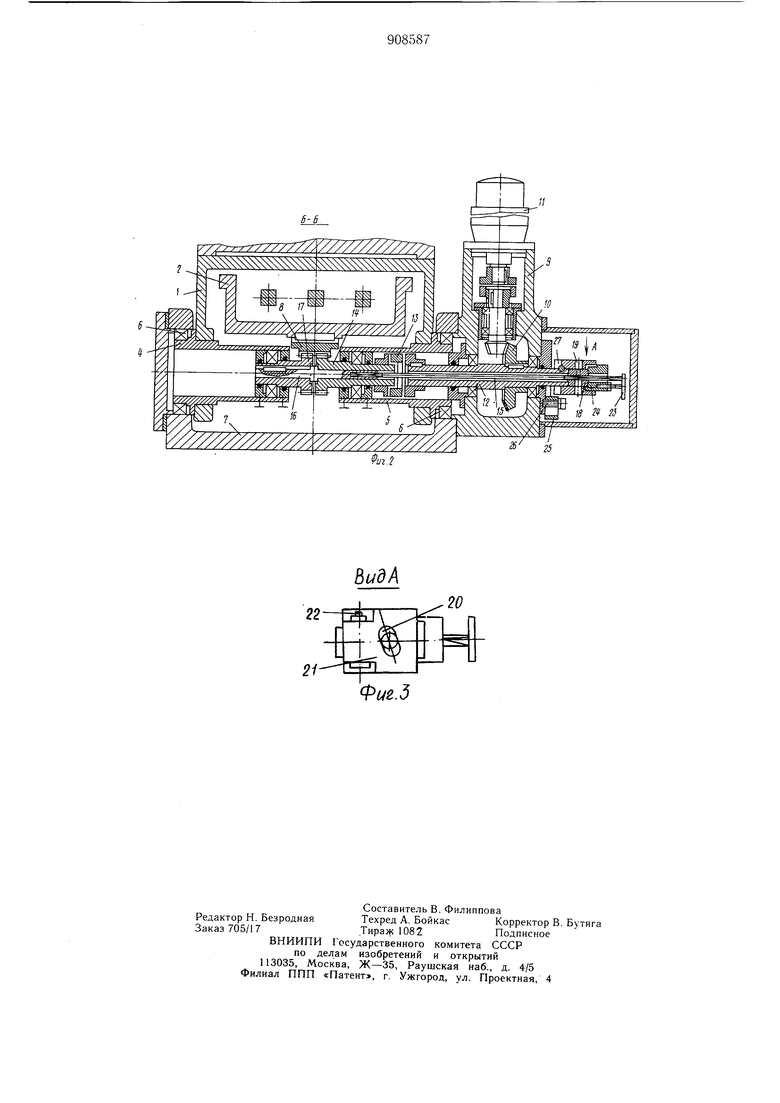
На фиг. 1 представлен манипулятор, общий вид; на фиг. 2 - сечение Б-Б на фиг. I; на фиг. 3 - вид А на, фиг. 2.
Рука манипулятора содержит несущий
корпус 1, внутри которого находится подвижная направляющая 2, на которой закреплена кисть 3.
С несущи.м корпусом 1 жестко связаны
10 цапфы 4 и 5, установленные на подщипниках 6, которые закреплены в неподвижном кронштейне 7. К низу подвижной направляющей 2 крепится жестко рейка 8. Сбоку неподвижного кронштейна 7 крепится привод выдвижения руки. Он содержит корпус 9
15 внутри которого смонтирован конический редуктор 10, приводимый вращением двигателя 11, установленного на корпусе 9. Выходной вал 12 конического редуктора проходит через цапфу 5 и через крестовую
20. муфту 13 связан с выходной шестерней 14, которая входит в зацепление с рейкой 8. Внутри выходного вала 12 и внутри выходной шестерни 14 проходит торсионный вал 15 концы которого выполнены в виде квадратов.
Левым квадратам торсионный вал 15 через валы 16 связан с выходной шестерней 17, которая находится в зацеплении с рейкой 8.
Правым квадратом торсион связан со втулкой 18, в которую запрессован штифт 19, сидящий в пазу 20 стакана 21. Стакан 21 связан с выходным валом 12 посредством штифта 22. Для фиксации торсионного вала.15 в осевом направлении служит винт 23, ввернутый в толкатель 24. Упор 25 фиксируется винтом 26 относительно паза 27 стакана 21.
Устройство работает следуюш:,им образом.
Для выдвижения кисти манипулятора включают двигатель 11. Враш,ающийся момент от двигателя 11 через конический редуктор 10 поступает на выходной вал 12 и через крестовую муфту 13 передается зубчатому колесу 14. Последнее воздействует на рейку 8, которая осуш,ествляет поступательное движение подвижной направляющей 2 и жестко с ней связанной кисти 3. Зубчатые колеса 14 и 17, составляющие выходную шестерню привода выдвижения, благодаря закрутке торсионного вала 15, замкнутого на выходной вал 12 и зубчатое колесо 17, прижаты к разным сторонам зубьев рейки 8, в результате люфт в паре рейкавыходная шестерня отсутствует.
Выбор люфта в паре рейка-выходная шестерня привода выдвижения происходит следующи.м образом. Вставляют подвижный упор 25 в паз 27 стакана 21 и фиксируют его винтом 26, т. е. происходит стопорение выходного вала 12 и связанного с ним зубчатого колеса 14 относительно корпуса 9 привода выдвижения. После этого вворачивают толкатель 24 в стакан 21, толкатель 24 торцом воздействуют на втулку 18, которая благодаря контакту штифта 19 с пазом 20 стакана 21 совершает винтовое движение.
зубчатое колесо 17 поворачивается относительно зубчатого колеса 14 до соприкосновения с зубом рейки 8. А так как квадрат конца торсионного вала 15 соединен со втулкой 18, которая имеет квадратное отверстие,
то происходит закрутка торсионного вала 15 до требуемого момента. После этого толкателем 24 фиксируют втулку 18, а винтом 23 -торсионный вал 15.
Применение предлагаемой конструкции позволяет увеличить ресурс работы привода
выдвижения кисти, иметь стабильную точность позиционирования кисти в течение всего срока службы руки манипулятора, а также упростить регулировку и выбор люфта в паре рейка-выходная шестерня привода выдвижения руки.
Формула изобретения
Рука манипулятора, содержащая корпус, привод выдвижения руки с выходньш валом, зубчато-реечным механизмом и механиз.мом выборки люфта, отличающаяся тем, что, с целью повышения эксплуатационных качеств выходной вал выполнен полым, а механизм выборки люфта выполнен в виде торсионного вала, расположенного в выходном валу, и снабжен дополнительной шестерней, установленной на одном конце торсионного вала и предназначенной для связи этого вала с зубчато-реечным механиз.мом, причем другой конец торсионного вала связан с выходным валом с возможностью регулировки их взаимного положения.
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 598750, кл. В 25 J 9/00, 1978.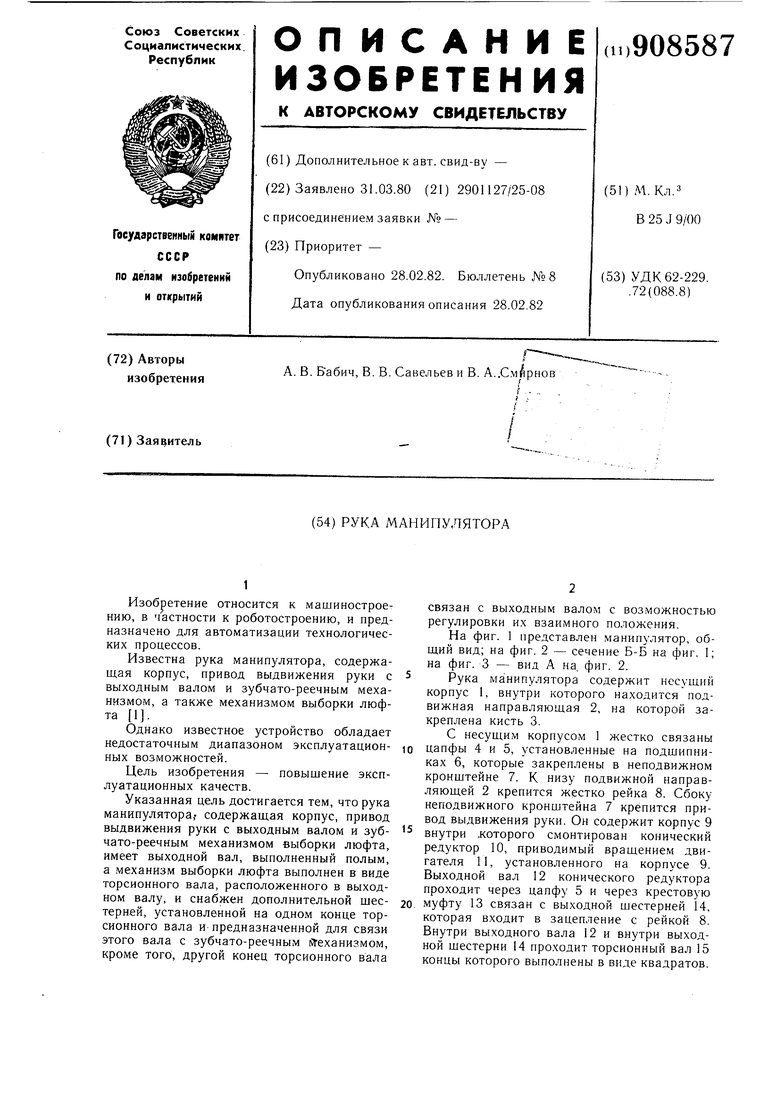
| название | год | авторы | номер документа |
|---|---|---|---|
| Рука манипулятора | 1981 |
|
SU992180A1 |
| Рука манипулятора | 1981 |
|
SU973348A1 |
| Рука промышленного робота | 1979 |
|
SU837848A1 |
| Рука манипулятора | 1985 |
|
SU1337253A1 |
| Рука манипулятора | 1981 |
|
SU1007961A1 |
| Механизм прямолинейного перемещения | 1983 |
|
SU1106653A1 |
| Механизм ориентации схвата манипулятора | 1978 |
|
SU722756A1 |
| Рука манипулятора | 1975 |
|
SU598750A1 |
| Рука манипулятора | 1985 |
|
SU1311929A1 |
| Манипулятор | 1985 |
|
SU1265040A1 |
ЬидА
