Фи& 1
ленной на основании 2, размещена втулка 3, охватывающая стойку 1. Механическая рука 4, установленная на втулке 3, проходит через прорезь поводка 5, выполненного в виде тонкостенного цилиндра. Поводок 5 жестко связан с поворютной платформой 6. и- имеет дополнительную опору 7 в верхней части стойки 1. Вертикальное перемещение осуществляется приводом,
состоящим из электродвигателя 8, червячной передачи 9, 10, приводного и неприводного дисков и гибкого выт ходного элемента 13. Поворот механической руки 4 в горизонтальной плоскости осуществляется приводом, состоящим из двигателя 14 и шестерни 15, взаимодействующей с зубчатым венцом, вьтолненным на поворотной платформе 6. 3 ил.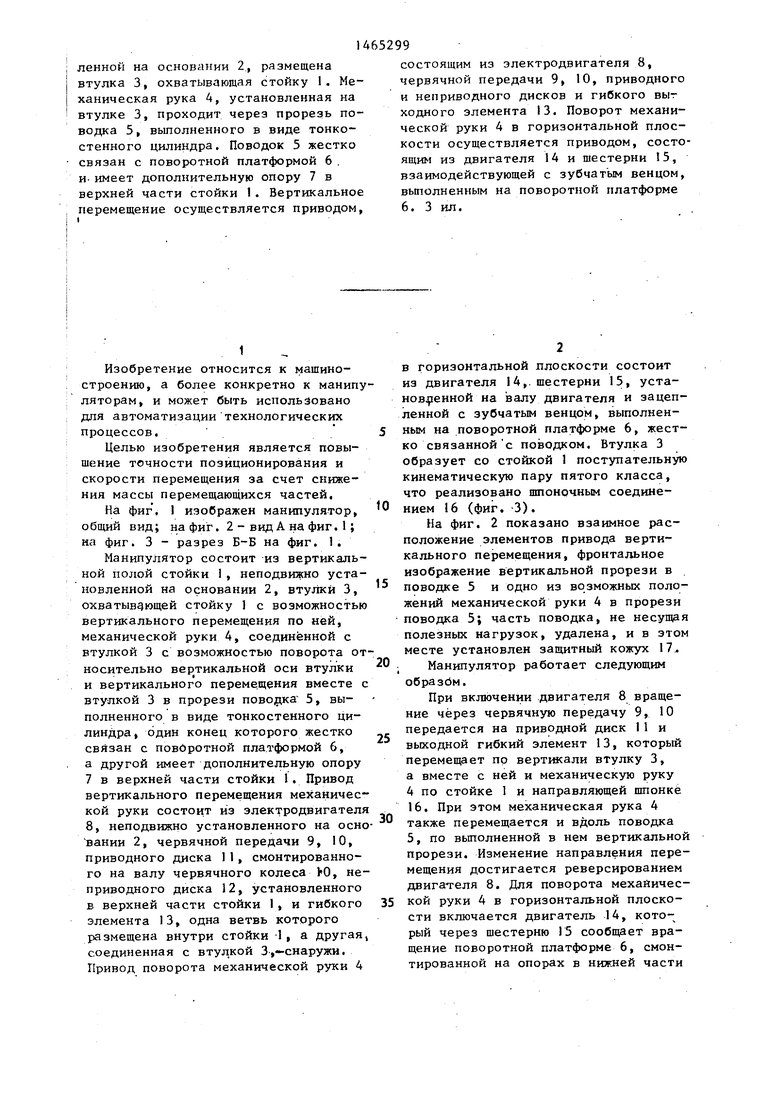
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1987 |
|
SU1657369A1 |
| Устройство для передачи штучных грузов к транспортно-складским конвейерам | 1990 |
|
SU1757974A1 |
| Автоматический манипулятор | 1989 |
|
SU1660951A1 |
| МАНИПУЛЯТОР | 1991 |
|
RU2022769C1 |
| КЛЕТЬ ПРОФИЛЕГИБОЧНОГО СТАНА | 2003 |
|
RU2252095C1 |
| КРАНОМАНИПУЛЯТОРНАЯ УСТАНОВКА | 1999 |
|
RU2167803C2 |
| ОБЛИЦОВОЧНЫЙ МАНИПУЛЯТОР | 1990 |
|
RU2023582C1 |
| Манипулятор | 1981 |
|
SU1002146A2 |
| ОПОРНО-ПОВОРОТНОЕ УСТРОЙСТВО ГИДРОМАНИПУЛЯТОРА | 1998 |
|
RU2157787C2 |
| Устройство для поштучной выдачи плоских заготовок из стопы | 1987 |
|
SU1503954A1 |
Изобретение относится к области машиностроения, а именно к манипулят. торам, применяемым для автоматизации технологических процессов. Целью изобретения является повьвпенйе точности позиционирования и скорости перемещения за счет снижения массы перемещающихся частей. Для этого на неподвижной полой стойке 1, установ
1
Изобретение относится к мащино- строению, а более конкретно к манипуляторам, и может быть использовано дпя автоматизации технологических процессов.
Целью изобретения является повы- щение точности позиционирования и скорости перемещения за счет снижения массы перемещающихся частей.
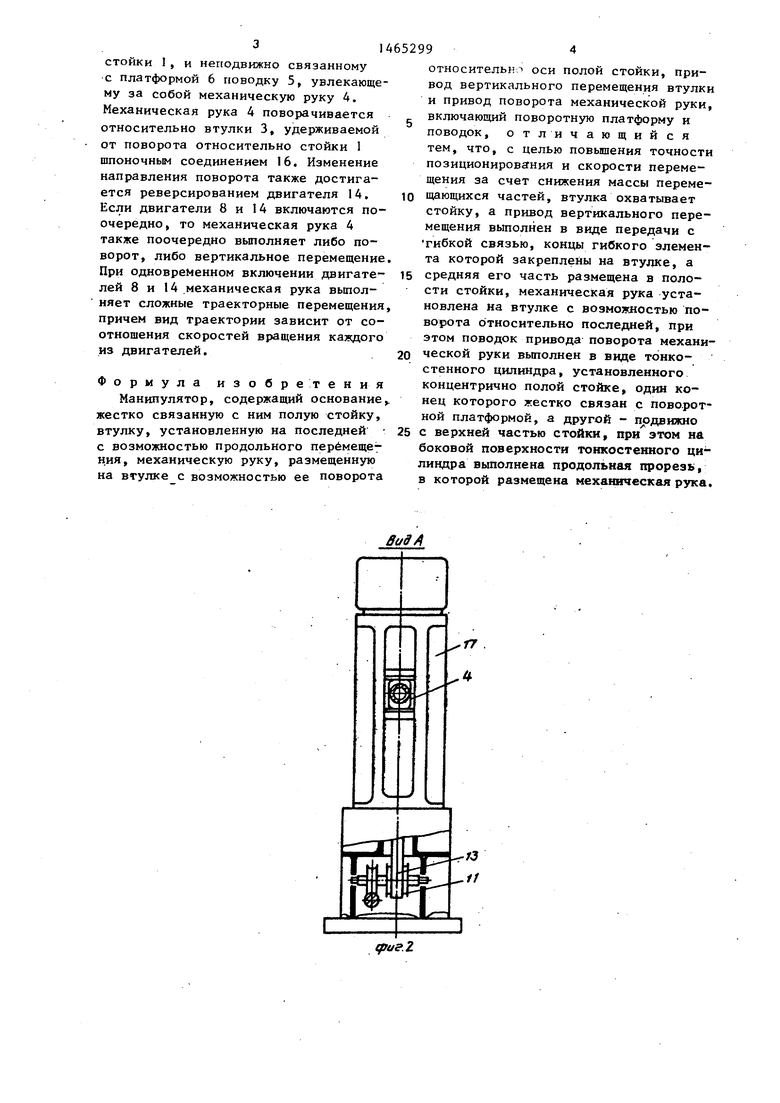
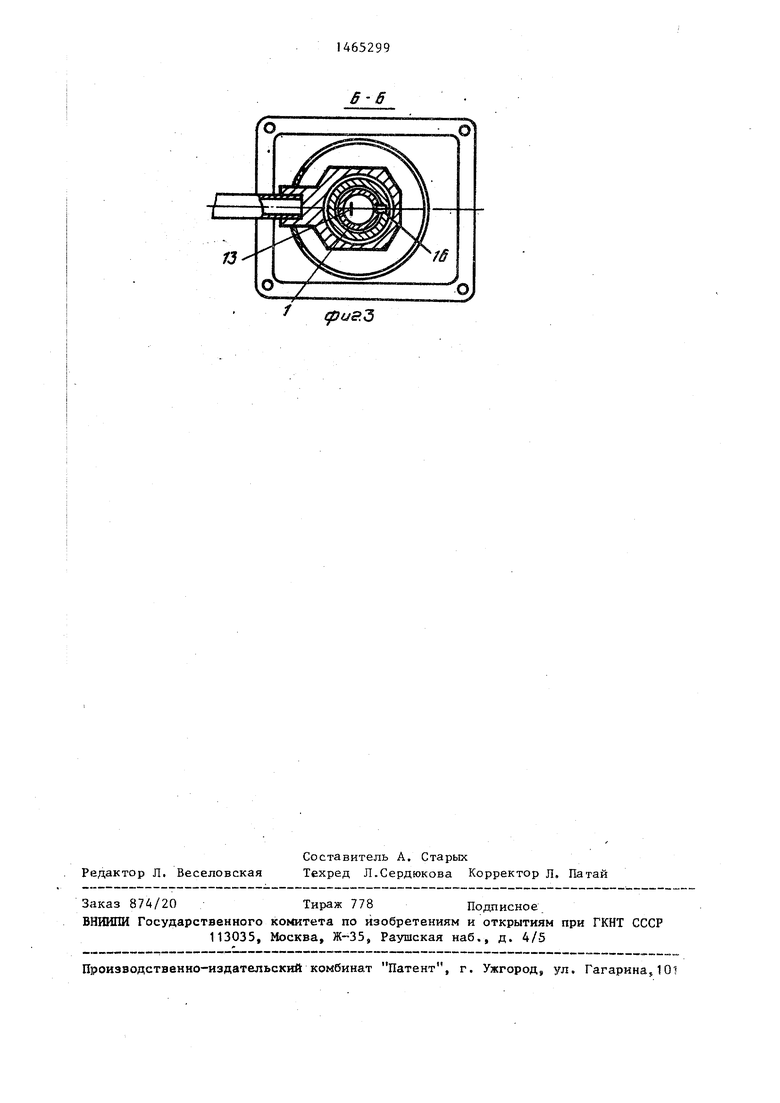
На фиг. 1 изображен манипулятор, общий вид; на фиг. 2 - вид А на фиг. 1 ; на фиг. 3 - разрез Б-Б на фиг. 1.
Манипулятор состоит из вертикальной полой стойки 1, неподвижно установленной на основании 2, втулки 3, охватывающей стойку 1 с возможностью вертикального перемещения по ней, механической руки 4, соединённой с втулкой 3 с возможностью поворота относительно вертикальной оси втулки и вертикального переме.щения вместе с втулкой 3 в прорези поводка 5, выполненного в виде тонкостенного цилиндра, один конец которого жестко связан с поворотной пла.тформой 6, а другой имеет дополнительную опору 7 в верхней части стойки I. Привод вертикального перемещения механической руки состоит из электродвигателя 8, неподвижно установленного на осно вании 2, червячной передачи 9, 10, приводного диска 11, смонтированного на валу червячного колеса Ю, неприводного диска 12, установленного Б верхней части стойки 1, и гибкого элемента 13, одна ветвь которого размещена внутри стойки , а другая соединенная с втул.кой 3,-снаружи. Привод поворота механической руки 4
в горизонтальной плоскости состоит из двигателя 14,,щестерни 15, уста- иов реиной на валу двигателя и зацепленной с зубчатым венцом, выполнен- ным на поворотной платформе 6, жестко связанной с поводком. Втулка 3 образует со стойкой 1 поступательную кинематическую пару пятого класса, что реализовано шпоночным соедине- нием 16 (фиг. 3).
На фиг. 2 показано взаимное расположение элементов привода вертикального перемещения, фронтальное изображение вертикальной прорези в поводке 5 и одно из возможных положений механической руки 4 в прорези поводка 5; часть поводка, не несущая полезных нагрузок, удалена, и в этом месте установлен защитный кожух 17 . Манипулятор работает следующим образбм.
При включении двигателя 8 вращение через червячную передачу 9, 10 передается на приводной диск 11 и выходной гибкий элемент 13, который переме1цает по вертикали втулку 3, а вместе с ней и механическую руку 4 по стойке 1 и направляющей щпонкё 16. При этом механическая рука 4 также перемещается и вдоль поводка 5, по выполненной в нем вертикальной прорези. Изменение направления перемещения достигается реверсированием двигателя 8. Для поворота мехайичес- кой руки 4 в горизонтальной плоскости включается двигатель 14, кото- рый через шестерню 15 сообщает вращение поворотной платформе 6, смонтированной на опорах в нижней части
стойки 1, и неподвижно связанному с платформой 6 поводку 5, увлекающему за собой механическую руку 4. Механическая рука 4 поворачивается относительно втулки 3, удерживаемой от поворота относительно стойки 1 шпоночным соединением 16. Изменение направления поворота также достигается реверсированием двигателя 14, Если двигатели 8 и 14 включаются поочередно, то механическая рука 4 также поочередно выполняет либо поворот, либо вертикальное перемещение. При одновременном включении двигателей 8 и 14 механическая рука выполняет сложные траекторные перемещения, причем вид траектории зависит от соотношения скоростей вращения каждого из двигателей.
Формула изобретения Манипулятор, содержащий основание жестко связанную с ним полую стойку, втулку, установленную на последней с возможностью продольного перёмеще- н.ия, механическую руку, размещенную на втулке с возможностью ее поворота
14
52994
относительно оси полой стойки, привод вертикального перемещения втулки и привод поворота механической руки, включающий поворотную платформу и поводок, отличающийся
тем, что, с целью повышения точности позиционирования и скорости перемещения за счет снижения массы переме- щающихся частей, втулка охватывает стойку, а привод вертикального перемещения вьтолнен в виде передачи с гибкой связью, концы гибкого элемента которой закреплены на втулке, а средняя его часть размещена в полости стойки, механическая рука установлена на втулке с возмождостью поворота относительно последней, при этом поводок привода поворота механи- ческой руки выполнен в виде тонкостенного цилиндра, установленного концентрично полой стойке, один конец которого жестко связан с поворотной платформой, а другой - прдвижно с верхней частью стойки, при этом на боковой поверхности тонкостенного цииндра вьшолнена продольная прорезь, которой размещена механическая рука.
.17 Ц.
дзаР.З
| Патент США № 4566847, кл | |||
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
