(54) ЗАХВАТНОЕ УСТРОЙСТВО
I
Изобретение относится к автоматизации загрузочно-разгрузочных работ в машиностроении и может быть использовано в качестве захватного органа промышленных роботов и маннпулятороб.
По основному авт. св. № 751621 известно захватное устройство, содержащее разъемный корпус, многолучевую пружину, захватные элементы в виде вертикально рас: положенных подпружиненных пальцев с упругими вставками и электрическими контактами и привод. Захват детали осущест-- fg вляется пальцами, установленными в многолучевой пружине и упруго разворачивающимися к центру захватного устройства при прогибе пружины {1)Однако захватывающее устройство имеет ограниченные технологические возмож- 15 ности в отношении точности определения размерных параметров захватываемых объектов, их формы и положейия захватываемого объекта в пространстве. Так, точность определения размерных параметров не превышает величины, характеризующей дискрет- иость расположения пальцев в радиальном направлении, т. е. величины радиальиого ша га расположения пальцев. Увеличение точности возможно с уменьшением расстояния между пальцами в радиальном направлении, что конструктивно сложно выполнить и что имеет свой предел, зависящий от размеров направляющих втулок, прочности самих пальцев и прочности перемычек пружины между ними. Если объект захвата цилиндрический и имеет на боковой поверхности лыску, величина которой меньше радиального шага расположения пальцев, то с помощью известной конструкции схвата выявить наличие этой лыски невозможно, а также невозможно определить ее расположение по углу. Все это ограничивает область применения известного захватного устройства особенно в условиях автоматической сборки.
Цель изобретения - расширение технологических возможностей захватного устройства.
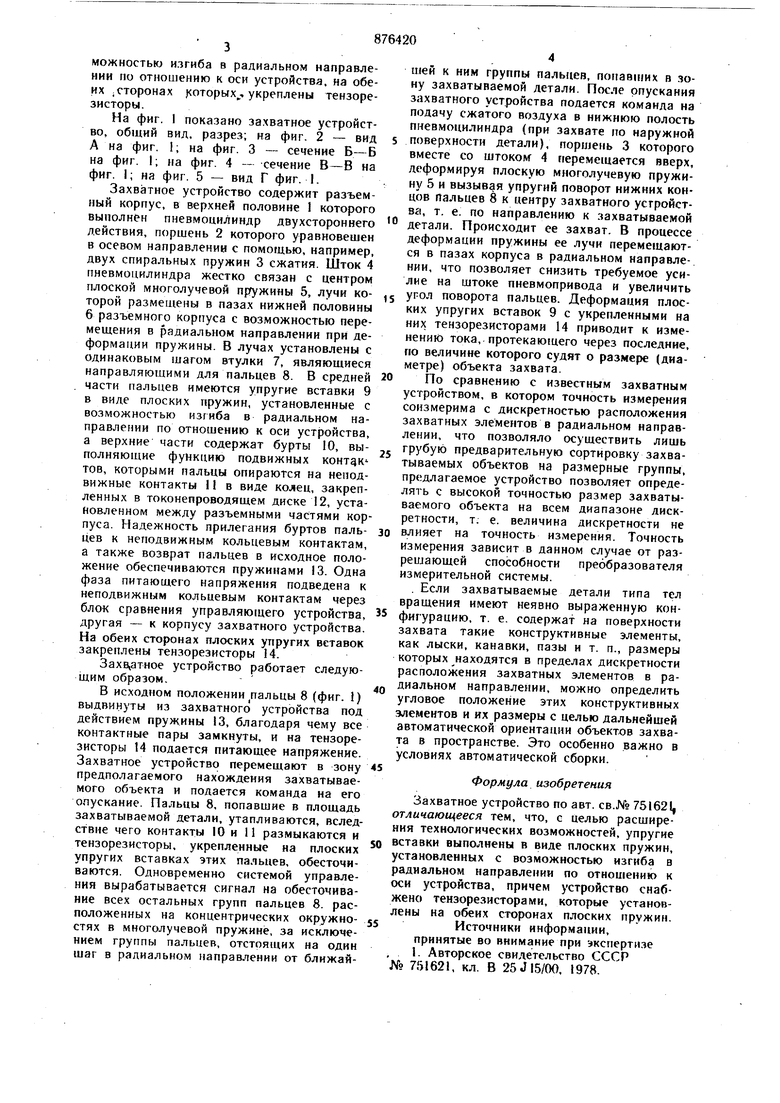
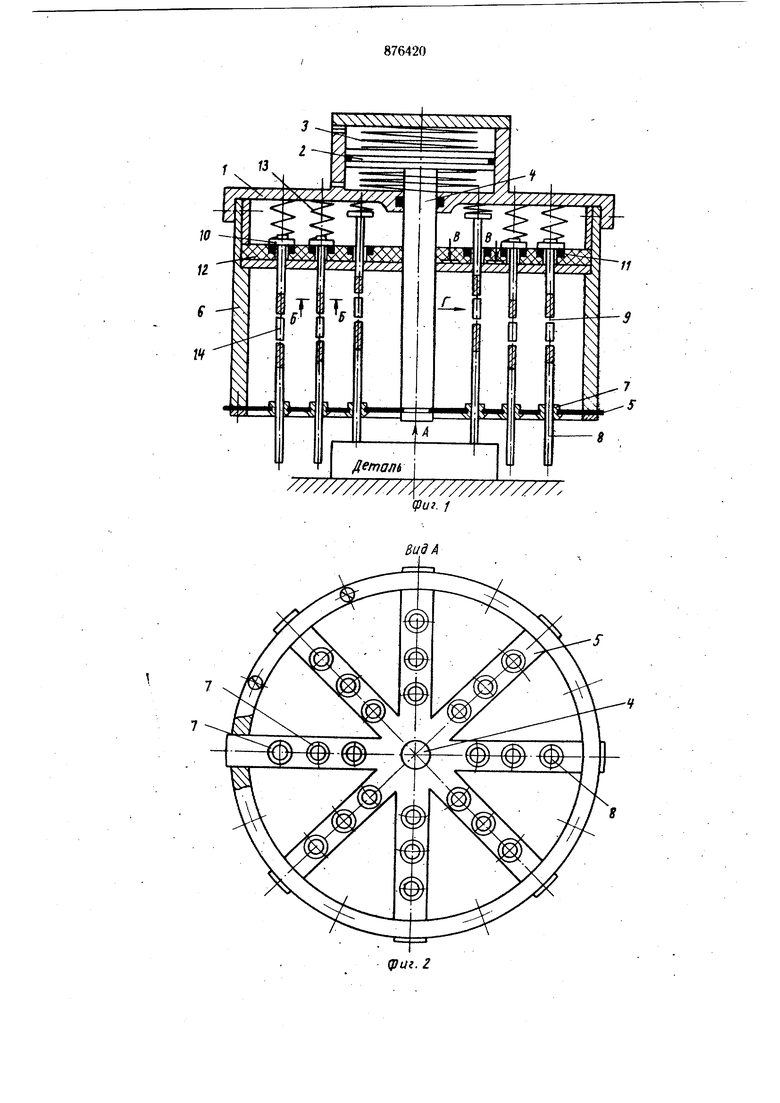
Поставленная цель достигается тем, что в захватном устройстве, содержащем разъемный корпус, многолучевую пружину, захватные элементы в виде вертикально расположенных подпружинениых пальцев с упругими вставками и электрическими контактами и привод, вставки выполнены в виде плоских пружии, устаиовленных с возможностью изгиба в радиальном направлении гю отношению к оси устройства, на обеих сторонах )оторых, укреплены тензорезисторы. На фиг. 1 показано захватное устройство, общий вил, разрез; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - сечение Б-Б на фиг. I; на фиг. 4 - сечение В-В на фиг. I; на фиг. 5 - вид Г фиг. I. Захватное устройство содержит разъемный корпус, в верхней половине 1 которого выполн&н пневмоцилиндр двухстороннего действия, поршень 2 которого уравновешен в осевом направлении с помощью, например, двух спиральных пружин 3 сжатия. Шток 4 пневмоцилиндра жестко связан с центром плоской многолучевой пружины 5, лучи которой размешены в пазах нижней половины 6 разъемного корпуса с возможностью перемещения в радиальном направлении при деформации пружины. В лучах установлены с одинаковым шагом втулки 7, являющиеся направляющими для пальцев 8. В средней части пальцев имеются упругие вставки 9 в виде плоских пружин, установленные с возможностью изгиба в радиальном направлении по отношению к оси устройства. а верхние части содержат бурты 10, выполняющие функцию подвижных контдк тов, которыми пальцы опираются на неподвижные контакты 11 в виде колец, закрепленных в токонепроводящем диске 12, установленном между разъемными частями корпуса. Надежность прилегания буртов пальцев к неподвижным кольцевым контактам, а также возврат пальцев в исходное положение обеспечиваются пружинами 13. Одна фаза питающего напряжения подведена к неподвижным кольцевым контактам через блок сравнения управляющего устройства, другая - к корпусу захватного устройства. На обеих сторонах плоских упругих вставок закреплены тензорезисторы 14. Захв,атное устройство работает следующим образом. В исходном положении пальцы 8 (фиг. 1) выдвинуты из захватного устройства под действием пружины 13, благодаря чему все контактные пары замкнуты, и на тензорезисторы 14 подается питающее напряжение. Захватное устройство перемещают в зону предполагаемого нахождения захватываемого объекта и подается команда на его опускание. Пальцы 8, попавшие в площадь захватываемой детали, утапливаются, вследствие чего контакты 10 и 11 размыкаются и тензорезисторы, укрепленные на плоских упругих вставках этих пальцев, обесточиваются. Одновременно системой управления вырабатывается сигнал на обесточивание всех остальных групп пальцев 8. расположенных на концентрических окружностях в многолучевой пружине, за исключением группы пальцев, отстоящих на один шаг в радиальном направлении от ближайшей к ним группы пальцев, попавпжх в .зону захватываемой детали. После опускания захватного устройства подается команда на подачу сжатого воздуха в нижнюю полость пневмоцнлиндра (при захвате по наружной поверхности детали), поршень 3 которого вместе со штоком 4 перемещается вверх, деформируя плоскую многолучевую пружину 5 и вызывая упругий поворот нижних концов пальцев 8 к центру захватного устройства, т. е. по направлению к захватываемой детали. Происходит ее захват. В процессе деформации пружины ее лучи перемешаются в пазах корпуса в радиальном направлении, что позволяет снизить требуемое усилие на штоке пневмопривода и увеличить угол поворота пальцев. Деформация плоских упругих вставок 9 с укрепленными на них тензорезисторамн 14 приводит к изменению тока, протекающего через последние, по величине которого судят о размере (диаметре) объекта захвата. По сравнению с известным захватным устройством, в котором точность измерения соизмерима с дискретностью расположения захватных элементов в радиальном направлении, что позволяло осуществить лишь грубую предварительную сортировку захватываемых объектов на размерные группы, предлагаемое устройство позволяет определять с высокой точностью размер захватываемого объекта на всем диапазоне дискретности, т. е. величина дискретности не влияет на точность измерения. Точность измерения зависит в данном случае от разрешающей способности преобразователя измерительной системы. . Если захватываемые детали типа тел вращения имеют неявно выраженную конфигурацию, т. е. содержат на поверхности захвата такие конструктивные элементы, как лыски, канавки, пазы и т. п., размеры которых находятся в пределах дискретности расположения захватных элементов в радиальном направлении, можно определить угловое положение этих конструктивных элементов и их размеры с целью дальнейшей автоматической ориентации объектов захвата в пространстве. Это особенно важно в условиях автоматической сборки. Формула изобретения Захватное устройство по авт. св.№ 751621, отличающееся тем, что, с целью расширения технологических возможностей, упругие вставки выполнены в виде плоских пружин, установленных с возможностью изгиба в радиальном направлении по отношению к оси устройства, причем устройство снабжено тензорезисторами, которые установлены на обеих сторонах плоских пружин. Источники информации, принятые во внимание при экспертизе , 1. Авторское свидетельство СССР № 751621, кл. В 25 Л5/00, 1978.
////////////)(///////////// (риг. /
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство | 1983 |
|
SU1135641A1 |
| Схват | 1979 |
|
SU837922A1 |
| Захватное устройство | 1978 |
|
SU751621A1 |
| Сборочно-захватная головка манипулятора | 1984 |
|
SU1191281A1 |
| ГОЛОВКА С ПРУЖИННЫМ ЗАХВАТОМ | 2007 |
|
RU2375154C2 |
| Пневматический захватный орган | 1982 |
|
SU1103926A1 |
| Оправка разжимная для исправления деформации отверстия прецизионных тонкостенных длинномерных труб в процессе наружной обработки | 2019 |
|
RU2759818C2 |
| Захватное устройство | 1990 |
|
SU1768383A2 |
| Захватное устройство | 1984 |
|
SU1220793A1 |
| УСТРОЙСТВО ДЛЯ ЗАХВАТА, ОБРАБОТКИ И ПЕРЕМЕЩЕНИЯ ОБЪЕКТОВ | 2002 |
|
RU2297380C2 |
S
(риг. 2
guff г
40
S Itf
э
(риг, 5
