цев в исходное полол снпе ооеспечнвается пружинами П. Одна фаза питающего напряжения подведена к неподвижным кольцевым контактам через блок сравнения управляющего уетройства, а другая - к корпуеу захватного устройегва.
Работает захват11ое уетройетво еледуюuuHvi образом.
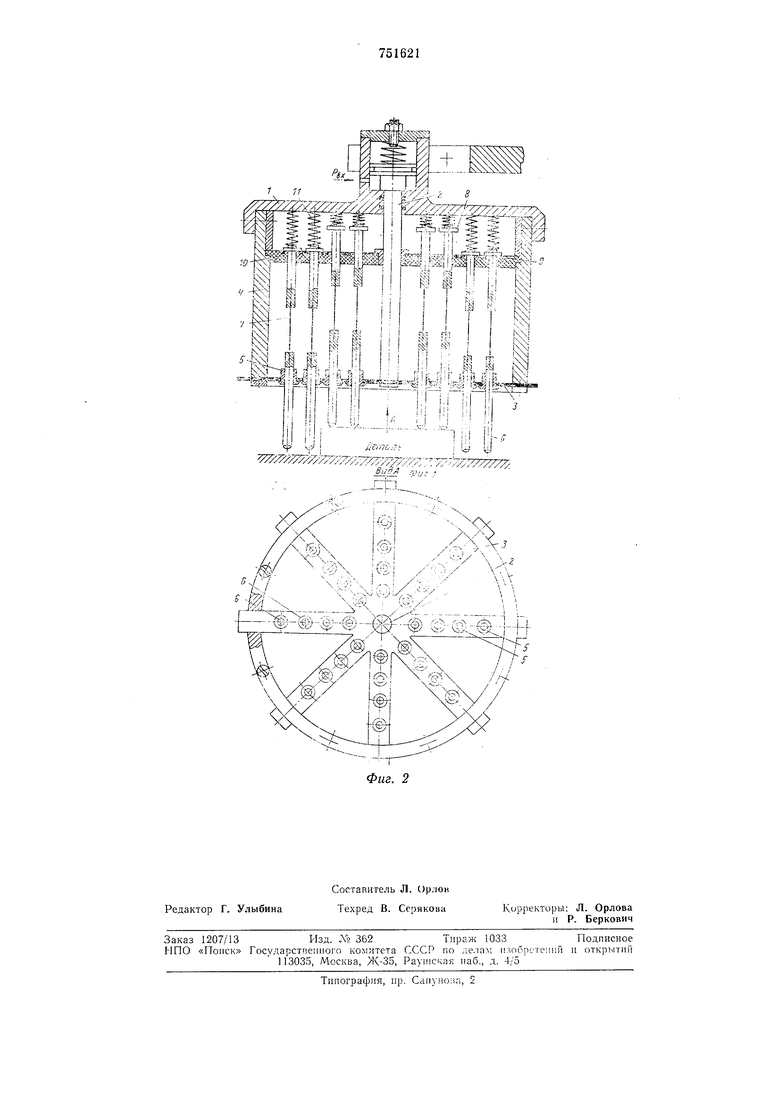
В исходном по;:ожеини нальцы 6 выдвннугы нз захватного лстройства под действием нружни 11 и вес контактные нары замкнуты. Захватное устройство перемеишют в зону иредполагаемого нахождения захватываемого объекта и нодается команда на его опускание. Пальцы 6, иопавюне в площадь захватываемой детали (фнг. 1), Зтанливаютея, вследствие чего контакты 9 размыкаются. После оиускаиня захватного устройс1ва подается команда на нодачу сжатого воздуха в нижиюю по,:юсть пневмоцнлппдра, поршень которого вместе со щтоком 2 неремепитется вверх, деформируя плоекую многолучевую нружииу 3 н вызывая упругнй поворот нижних кснгцов нальцев 6 к цетру захватного Зстро1 ства, т. е. ио паираиленню к захпатьизаемой детали. Пропсходпт ее захват. В процессе дефо)мацпп нруж1П1ы ее лучи переменитютея в пазах корп)са к радиал1)Иом наирав.ченнн.
Благодаря упорядоченному расиоложеиню нальцев 6 в лучах пружин 3 (фиг. 2), а имеиио, на коицептричных окружностях, расио;1ожениых с одинаковым шагом в радиал)Иом 1 анравлеи1И1 иа од.инаковых углопых расстояниях дру)- от друга, ио сочетаииям :1азомкиутых коитактов .можно суднтг, с оиределеипой точиостью о размере (дна.метре) захваченной детали i: о величине ее смещеиия от центра захватного устройства. Точность ннфор.мации зависит от дискретпости расиоложення нальиев. Чем меньше дискретность (mai уг.човое
расстоя1и-1е), тем ьыще точность определения меетонахождеппя детали и ее диаметра. На основании этой ннформаинн, которая обрабатывается в унравляюьцем устройстве, можно судить, к какой размерной
груние относится захваченная деталь и осуществлять сортировку, а также осуществлять корректировку их положеиия.
Форм у .4 а и 3 о б р е т е и и я
Захватное устройство, содержап1ее разъе.мный кориус, замзатные эле.менты в виде вертнкально расио.южеиных подпружиненных н ирнвод, нанример, енловой
ци.тиндр, о т л и ч а ю HI, е е с я те.м, что, с целью раещиреиия техиологических воз.можностей, оно снабжено многолучевой и.юской иружнно, связаииой со иггоком cri.iOBOio цилиидра. 15ту,чками, в которых
распо.тожеиы иижпне концы на.чьиев, устаиовлеииы.и в лучах ируж)ны, и.мею1Ц1Г возможность paдI;a,IlJИ{)|(J пере.мепкчшя, токопепроводяпиьм диском с вмонтированпыми в него электрическими контактами,
в котором установлены снабженные буртами верхиие концы пальцев, образуюихие с Бышеуиомянутымн контактами контактную нару, нричем нальцы в средией части снабжены уиругой встаг-кой.
Источник : ннформацин,
цри1гятые B(j в нмаиие н)и эксисптизе 1. Лр/горекое егя1детел1)Ство СССР .YO 533778, кл. В 251 15/04, 30.10.76.
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство | 1979 |
|
SU876420A2 |
| Захватное устройство | 1983 |
|
SU1135641A1 |
| РАЗЪЕДИНИТЕЛЬ С ПЛАВКИМИ ПРЕДОХРАНИТЕЛЯМИ | 1972 |
|
SU329711A1 |
| Захватное устройство | 1984 |
|
SU1220793A1 |
| Устройство для отделения деталей от пачки | 1989 |
|
SU1671590A1 |
| МЕХАНИЧЕСКИЙ СХВАТ | 2003 |
|
RU2257996C1 |
| Захватное устройство | 1991 |
|
SU1816689A1 |
| Захватная головка манипулятора | 1986 |
|
SU1342727A1 |
| Устройство для удаления стружки из глухих отверстий | 1987 |
|
SU1521560A1 |
| Центрирующее захватное устройство | 1985 |
|
SU1283099A1 |