(54) ТРАНСПОРТИРУЮЩЕЕ УСТРОЙСТВО


| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для опускания спутников с одного уровня на другой | 1983 |
|
SU1137034A1 |
| УСТРОЙСТВО ДЛЯ ПОШТУЧНОЙ ВЫДАЧИ ИЗДЕЛИЙ ИЗ СТОПЫ | 1990 |
|
RU2006436C1 |
| УСТАНОВКА ДЛЯ УКЛАДКИ ШТУЧНЫХ ИЗДЕЛИЙ В КАРТОННЫЕ ЯЩИКИ | 1991 |
|
RU2005678C1 |
| Транспортная система несинхронной сборочной линии спутникового типа | 1981 |
|
SU956242A1 |
| Пакетоформирующее устройство | 1982 |
|
SU1065322A1 |
| Устройство для укладки в пакет чушек | 1984 |
|
SU1207948A1 |
| АВТОМАТИЗИРОВАННАЯ ТРАНСПОРТНО-СКЛАДСКАЯ СИСТЕМА ДЛЯ КОЛЕСНЫХ ШИН | 1990 |
|
RU2013327C1 |
| ПОТОЧНАЯ ЛИНИЯ ДЛЯ ГЛУБОКОЙ НАКОЛКИ ШПАЛ | 1991 |
|
RU2026174C1 |
| Устройство для перегрузки изделий | 1983 |
|
SU1181968A1 |
| Гравитационная транспортная система | 1988 |
|
SU1569186A1 |


I
Изобретение относится к транспо4)тным системам со спутниками и может быть использовано в несинхронных автоматичес-ких, автоматизированных н поточных линиях механической обработки, сборки н испытания.
Известно транспбртнрующее устройство, включающее замкнутую цепь, которая в процессе работы находится в постоянном движении. Цепь служит для перемещения, спутников, каждый из которых имеет механизм сцепления с цепью, включающий в себя звездочку, находящуюся в постоянисии зацеплении с цепью, и фрикционную муфту, которая в зависимости от управляющих средств запирает или освобождает звездочку. В первом случае спутник перемещается вместе с цепью, во втором он стоит на месте на технологической позиции. Для останова и отсекания спутинков на рабочих технологических позициях и перед станциями опускания н подъема установлены механизмы с поршневыми приводами. Для возврата спутников предусмотрены направляющие, размещенные под нижней ветвью цепи, при этом спутники транспортируют в перевернутом состоянии jllДанное транспортирующее устройство сложно конструктивно, требует высокой точности в процессе изготовления отдельных элементов, тщательной тарировки пружин предохранительных муфт спутников. Сложная система управления не достаточно надежна в работе.
Наиболее близким к предлагаемому является транспортирующее устройство, включающее раму с опорами, на которой размещены один под другим два двуцепных контура со спутниками н парными звездочками на каждом ведущем и ведомом валах, механизм фиксации со столом и прижимом, подъемно-опускные секции, каждая из которых с приводом, платформой и расположенным перед ней отсекателем |2.
5 Недостатком данного транспортирующего устройства является недостаточная надежность работы.
Цель изобретения - повыщение надежности работы.
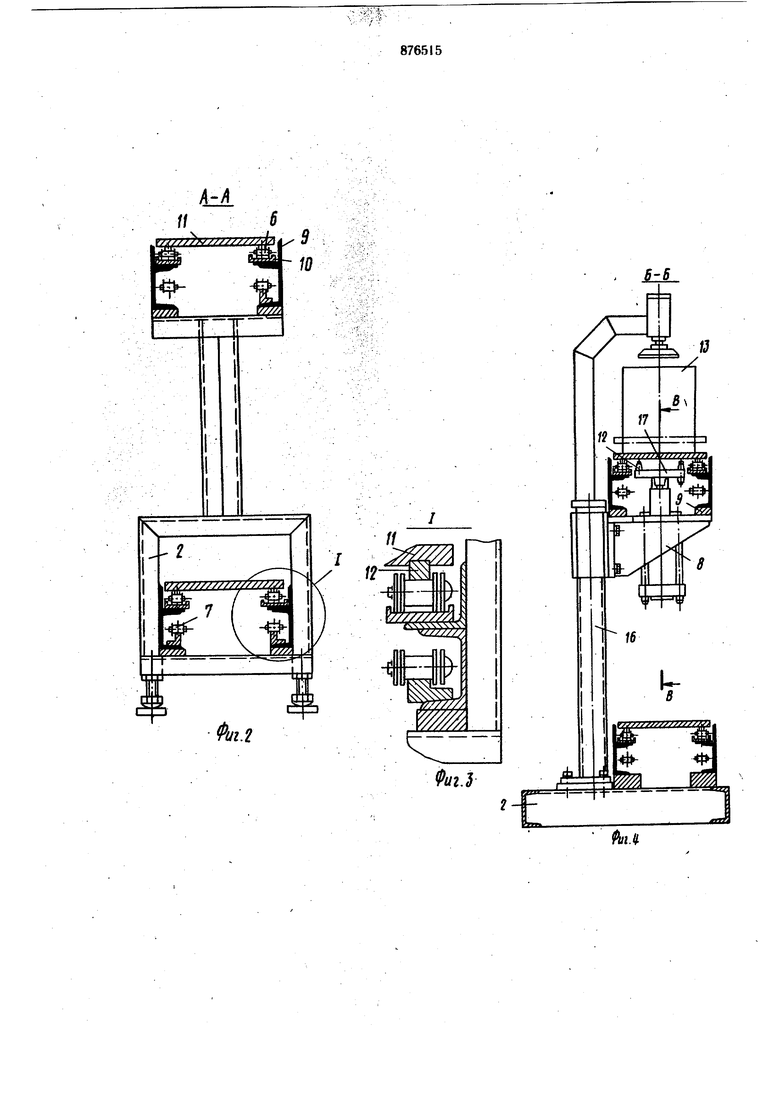
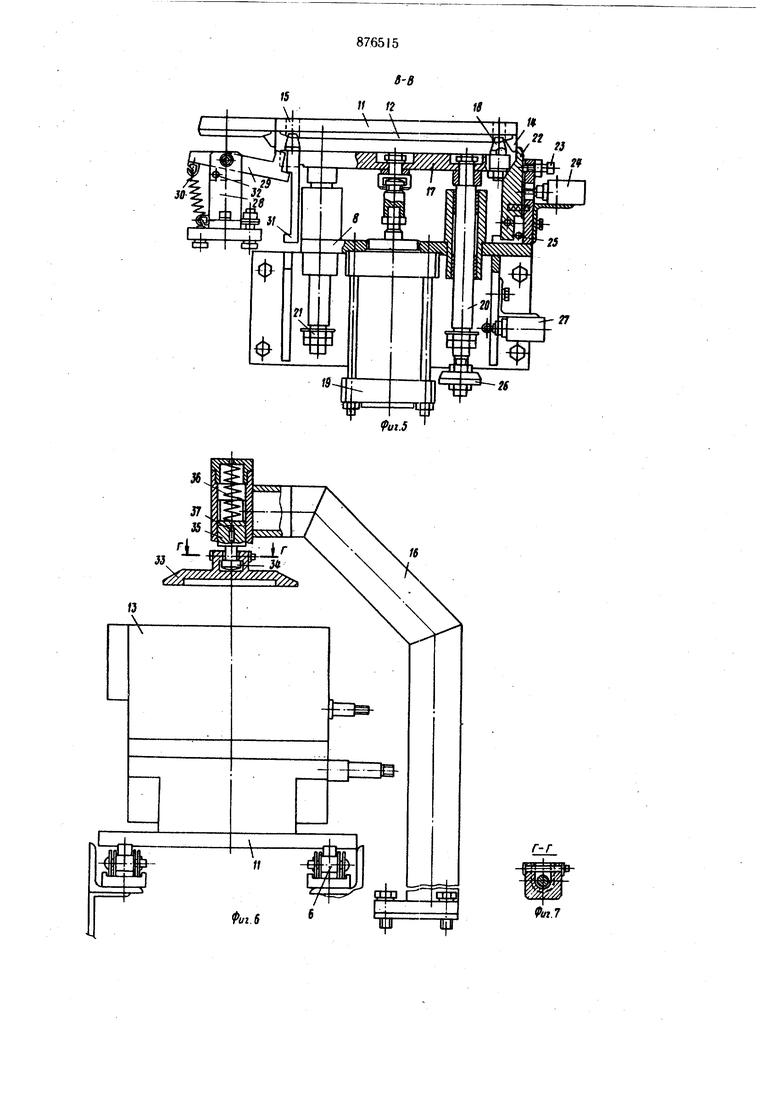
Указанная цель достигается тем, что ме ханизм фиксации снабжен закрепленной на столе профилированной планкой, отсекателем в виде двуплечего рычага, устйновленного с возможностью взаимодействия с планкой, съемными прокладками, расположенными под опорами в зоне фиксации, и тарированной пружиной,(размешенной в корпусе прижима, при этом каждая подъемноопускная секция снабжена установленными в верхнем и нижнем положениях платформы упорами и закрепленными на платформе клином и установленным с возможностью взаимодействия с упо()ами двуплечим рычагом, причем каждый отсещхель перед подъемно-опускной секцией выполнен в виде двуплечего рычага с роликом с возможностью взаимодействия с клином, а привод каждой подъемно-опускной секции - в виде зубчато-реечной передачи с ведушим и ведомым рычагами, на концах, которых шарнирио закреплена платформа, при этом одна из каждой пары звездочек на ведушем н ведомом валах установлена с возможностью tioBopOTa. На фиг. 1 представлено транспортирую:шее устройство, обший йид; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3- узел на фиг. 2; на фиг. 4 - разрез Б-Б на фиг. I; на фиг. 5 - разрез В--В На фиг. 4; на фиг. 6 - вид на механизм прижима; на фиг. 7 - разрез Г--Г на фнг. 6; на фиг. 8 - секция опускания; на фнг. 9 - разрез Д-Д на фиг. 8; а фиг. 10.- разрез Е-Е на фяГ; 8. Транспортирующее устройство включает подъемную секцию 1, раму 2, Механизм 3 фиксации с прижимом 4, опусшую секцию 5, два расположенных один под комтура, параллельных бесконечных тяговых втулочно-роликовых цепей 6 н 7, размещенных на раме 2 и кронштейне 8, на котором смонтирован механизм 3 фиксации. На раме 2 закреплены соответственно съемные прокладки 9, расположенные под опорамМ 10, для ветвей цепей. Верхний цепной kbtiвейер предназначен для транспортирования спутников 1 слева направо, а нижний - справа налево. Спутники-И не имеют соедннения с цепями, а onиpaюtcя на ролики цепи двумя параллельными направляк щими 12, размешенными на нижней плосКйи:ти каждого спутника. Спутники предназначеиы для размещения транспортируемого изделия 13. На спутниках Предусмотрены упоры 14 и два диаметрально расположен ные центрирующие отверстия 15 (не показаны). На позициях, где требуется фиксация и зажим изделий (механическая обработка, сборка, контроль и т. п.), установлены соосио механизм 3 фиксации и прижим 4; которые .смонтированы иа общей колоине 16, жестко закрепленной на раме 2. Мехаиизм 3 фиксации (фиг. 5) имеет стол 17, с установленными штырями 18 для взаимодействия с отверстиями 15; Стол 17 закреплеи иа штоке поршневого привода 19 и снабжен иаправляющими скалками 20 с регулировочными гайками 21, предиазначенными для ограничения ход;а стола 17, на котором в зоне выхода из механизма фиксации смонтирован шарнирно подпруАсннениый рычаг 22, нмеющий возможность взаимодействия с регулируемым упором 23, конечным выключателем 24 системы управления и ограничительным штифтом 25. На конце одной из скалок 20 установлен упор 26 для взаимодействия с конечным выключателем 27, На раме 2 иа выходе в механизм фиксации расположен отсекатель, выполнениый в виде шарнирно закрепленного на опоре 28 двуплечего рычага 29, одно плечо которого связано с пружиной 30, а другое имеет возможность взаимодействия с профилированной планкой 31, закрепленной на столе 17 механизма фиксации. Для ограничения хода рычага 29 предназначен штнфт 32. Рычаг 29 предназначен для отсекания спутииков. Прижим 4, представляет собой самоупра ляюшийся диск 33, закреплеиный шарнирио посредством полусферичес;кой опоры 34 на плунжере 35. Плунжер 35 подпружинен с помощью тарированной пружины 36 и имеет ограничитель 37. .Опускная 6 н подъемная 7 се,кцин (фнг. 8) аналогичны друг другу по. конструкции, которая включает корпус 38 со смонтированной в нем зубчатой парой в виде рейки 39 с поршневым приводом 40 и шестерни 41. На валу 42, на котором закреплена упомянутая шестерня 41, жестко закреплен рычаг 43. Другой рычаг 44 шарнирно закреплен на кронштейне 45, жестко связанном с корпусом 38. На концах рычагов ииарнйрНо закреплена платформа 46, на которой на боковых и верхних гранях закреплены опорные ролики 47 и ограничительные ролики 48 для спутников. На платформе 46 шарнирно закреплен двуплечнй рычаг 49, плечи которого располбжены друг относительно друга под углом 90°. Одно из плеч 50 рычага 49 подпружинено, а ход этого плеча 50 ограничен упором 51 размещеи-.ным на платформе 46. Второе плечо 52 имет ет йозможИость взаимодействия с регулируемым упором 53,. установленным на корпусе 38, и подсобным упором 54. На рычаге 49 установлен ограничитель хода 55 до упора в раму 2. Опускная секция 5 снабжена конечными выключателями 56 и 57, входящими в систему управления. На конце цепного конвейера перед опускной раме 2 закреплен механизм отсекания, включающий в себя закрепленный иа раме 2 двуплечий рычаг 58 (фиг. 8), левое плечо которого подпружинено и имеет плоский торец, а правое плечо снабжено регулируемой накладкой 59 с плоским торцом и прямоугольиь1М уступом 60. На этом плече рь1чага 58 закреплен контактный ролик 61, для взаимодействия с клином 62, установленным иа платформе 46 и имеющим регулируемый вылет. Для огр шичения ходя левого плеча рычага 58, предназначен штифт 63, смонтированный на раме 2. Приводы и натяжные станции цепных контуров на чертежах не показаны. На ведомых и натяжных валах 64 (фиг. 10) каждого контура одна из звездочек 65 установлена жестко, а другая 66 - с возможностью поворота относительно вала. В транспортирующем устройстве предусмотрена система управления, которая на чертежах не показана за исключением ряда конечных выключателей. Транспортирующее устройство работает следующим образом. В процессе работы 6 и 7 верхнего несущего и нижнего возвратного контуров находятся в постоянном вращении. ПрследовательНый ряд спутников 11 с изделиями 13 перемещается цепью 6 верхнего контура к первой рабочей позиции, на которой установлен механизм фиксации 3 с прижимом 4. Первый в ряду спутник нажимает упором 14 на рычаг 22 и прижимает рычаг 22 к упору 23, одновременно воздействуя на конечный выключатель 24, который дает команду на подъем стола 17 с помощью порщневого привода 19. Ограничителями перемещения стола 17 служат регулировочные гайки 21. При этом установочные щтыри 18 входят в центрирующие отверстия 15 спутника 11, который вместе с деталью 13 поднимается и поджимается к самоустанавливающемуся подпружиненному диску 33 4. В 3aBHCHMOctH от типа детали и характера операции устанавливают тарированную пружину 36 на требуемое усилие. Ограничение усилия прижима имеет большое значение в комплексных сборочно-испытательных линиях, так как значительное по величине усилие, необходимое на сборочной операции такой, как прессование или резьбозавертывание, недопустимо на контрольных операциях таких, как измерение люфта или подбор толщины прокладок, поскольку оно искажает действительные значения измеряемой величины, особенно в изделиях малой жесткости. В конце хода стола 17 вверх упор 26 нйжимает на конечный выключатель 27, и он дает команду на включение в работу соответствующего технологического оборудования. При подъеме стола 17 вверх рычаг 29 поворачивается и преграждает дорогу на рабочую позицию последующим спутникам. В верхнем положении рычаг 24 зафиксирован с помощью нижнего выступа профилированной планки 31. При этом, если рабочая позиция должна быть изолирована от источников внешних усилий (рывки id вибрации цепи, соударение спутников и т. д.), то дополнительно на участке механизма фиксации снимают прокладки 9. После подъема спутника 1I вверх рычаг 22 отводится от упора 23 и устанавливается под углом порядка 10°к вертикали. При опускании спутника 11 вниз рычаг 22 оказывается за пределами упора 14 и не препятствует прохождению спутника 11 после завершения технологической операции на следующую позицию. В процессе опускания стола 17 вниз профилированная планка 31 своим верхним выступом нажимает на рычаг 29 и отжимает его правое плечо вниз, освобождает проход следующему спутнику с деталью в зону механизма фиксации. После завершения всех технологических операций, остановки на которых происходят известным путем и удаления детали, спутник II приходит к опускной секции 5 (фиг. 8), которая по своей конструкции аналогична секции подъема 1. Если в момент подхода спутника платформа 46 не находится в верхнем положении, то рычаг 58 занимает положение, когда накладка 59 находится в крайнем верхнем положении (на чертеже обозначено щтрихпунктирной линией). При этом спутник И упирается в уступ 60 рычага 58. После подъема платформы 46 в верхнее положение, клин 62, нажимая на ролик 61 отсекателя, опускает его рычаг 58 в положение, чтобы уступ 60 не препятствовал спутнику II, и последний поступает на платформу 46 до упора в конце ее. При этом он нажимает на накладку 59, высоту и вылет которой можно регулировать, и преодолевая действие пружины рычага 58, поднимает левое плечо его так, что последующий спутник упирается в его торец, для которого оно служит упором. В верхнем положении платформы 46 плечо 52 рычага 49 взаимодействует с упором 58. При этом его плечо 50, преодолевая действие пружины, опускается и не препятствует продвижению на платформу спутника. Спутник в конце перемещения по платформе 46 нажимает на конечный выключатель 56, который дает команду на опускание платформы 46. Верхнее плечо 50 рычага 49 поджимается до упора 51 и зажимает спутник 11, препятствуя его самопроизвольному соскальзыванию с платформы 46 во время опускания ее вниз. Клин 62 освобождает ролнк 61, и рычаг 58 приходит в исходное положение. При этом левое плечо рычага 58 опускается и пропускает спутник 11 до упора в уступ 60. После опускания платформы 46 ц нижнее положение рычаг 49 с помощью упора 54 отводится так, что его плечо 59 утапливается, и спутник 11 по роликам 47 соскальзывает на цепь 7 нижнего контура и по ней поступает на подъемную секцию 1, где все происходит аналогичным образом, олько снизу вверх. При этом спутник 11 ажимает на конечный выключатель 57, коорый подает команду на подъем платфоры 46 с помощью поршневого привода 40. аким образом цикл повторяется. Предлагаемое транспортирующее устройство обладает рядом преимуществ. Прежде всего oHOt- более .просто конструктивно, а, следовательно, и более надежно. Также более надежен в работе и В управлении механизм отсекания из-за от-. 5 сутствня у него иидивидуального привода Наличие шеред механизмом фиксации от- секающего подпружинеииого рычага и вынолиение прокладок съемными позволяет изолиръвать спутник с деталью, находящейся в зоне фиксации, от воздействия внеш- О иих усилий, сказывающихся, в частности, на точности показаний из материальной и контролнрующей аппаратуры. Наличие в прижиме тарированной на заданное усилие пружины позволяет в процессе техно- ,5 логнческой операции создавать оптимальиое усилие зажима. То обстоятельство, что на ведомых и натяжных валах одна из звездочек установи лена с возможностью поворота, позволяет исключнть влияние на работу транспорти- 20 рующего устройства отклонений шага и но- . мннальной длины цепи, ее набегания, и, следовательно, обеспечивает надежную пёрегрузку спутников с опускиой и подъемной секции на верхний и нижний Контуры, не- г ключая возможные перекосы и заклини0аиия спутников. Формула изобретения Транспортирующее устройство, включаю щее раму с опорами, на которой размещены один под другим два двуцепных койтура со спутниками и парными звездочками На каждом ведущем и ведомом валах, ме30ханизм фиксации со столом и прижимом, подъемнр-опускиые секции, каждая из которых с приводом, платформой и располо женным перед ней отсекателем, тлинающееся тем, что, с целью повышения иадежиостн работы, механизм фиксации снабжен закрепленной на столе профилированной планкой, отсекателем в виде двуплечего рычага, установленного с возможностью взаимодействия с планкой, съёмными прокладками, расположеннь1ми под опорами в зоне фиксации, и тарированной пружиной, размещенной в корпусе прижима, при этом каждая подъем но-опускная секция снабжена установленными в верхнем и нижнем положениях платформы упорами и закрепленными на платформе KJJHHOM и установленным с возможностью взаимодействия с упорами двуплечнм рычагом, причем каждыЙ отсекатель перед подъемно-опускной секцией выполнен в виде двуплечего рычага с роликом с возможностью взаимодействня с клином, а привод каждой подъемно опускной секции выполиеи в виде зубчатореечной передачи с ведущим и ведомым рычагами, на концах которых шарнирио ,закреплена платформа, при этом одна из каждой пары звездочек на ведущем и ведомом валах установлена с возможностью поворота. Источники информации, принятые во внимание при экспертизе i. «Механизация и автоматизация производства, 1974, № 4, с 51-52. 2. Станция головная. Рабочие чертежи № 151.060. Разработ. Павлодарский проектно-конструкторский технологический ннститут. Утв. 11.12.78 (прототип).
Izi.
n
/
b
.H.
Г-, /
ui.5
Г-Г Ul.S .
