J/ 3 7 Ц 11 35 32
| название | год | авторы | номер документа |
|---|---|---|---|
| Межоперационный склад цилиндричес-КиХ издЕлий | 1979 |
|
SU821327A1 |
| Транспортирующее устройство | 1979 |
|
SU876515A1 |
| Устройство для опускания спутников с одного уровня на другой | 1983 |
|
SU1137034A1 |
| Склад для хранения штучных грузов | 1986 |
|
SU1368232A1 |
| Устройство для намотки ленты на катушку на текстильных машинах | 1966 |
|
SU268949A1 |
| Утсановка для окраски изделий | 1975 |
|
SU651854A1 |
| Устройство для загрузки гравитационного многоярусного стеллажа цилиндрическими изделиями | 1989 |
|
SU1654153A1 |
| Устройство для сборки запрессовкой цилиндрических изделий типа роликов | 1986 |
|
SU1349951A1 |
| Устройство для сортировки круглого леса | 1962 |
|
SU151963A1 |
| Шаговый конвейер | 1982 |
|
SU1062141A1 |
Изобретение относится к транспортирующим устройствам и может быть использовано в качестве межоперационного транспорта. Целью изобретения является повышение надежности путем замены механизмов возвратно-поступательного перемещения на шарнирно-рычажное. Система содержит раму 1 с верхними направляющими 2 и нижними направляющими 3, спутники 4, приводные рычаги 5 и платформы 6 с направляющими под спутники. В верхнем положении платформа ограничена упорами 7 и 8 верхних направляющих, а в нижнем положении - упорами 9 и 10. Спутник 4 перемещается по наклонным верхним направляющим 2 на платформу 6. Приводной рычаг 5 переносит платформу со спутником до упоров 9 и 10 нижних направляющих 3. За счет наклона последних он скатывается с платформы на нижние направляющие 3. 2 з.п.ф-лы, 2 ил.
27 37 2818 15 1317 22 Ч J /
Риг.}
& 1926
JJ 8 ЮЗ1
СД
аъ
оо
Изобретение относится к транспортиоую- щим устройствам и может быть использовано в качестве межоперационного транспорта.
Целью изобретения является повышение надежности устройства путем замены механизмов возвратно-поступательного перемещения на шарнирно-рычажные.
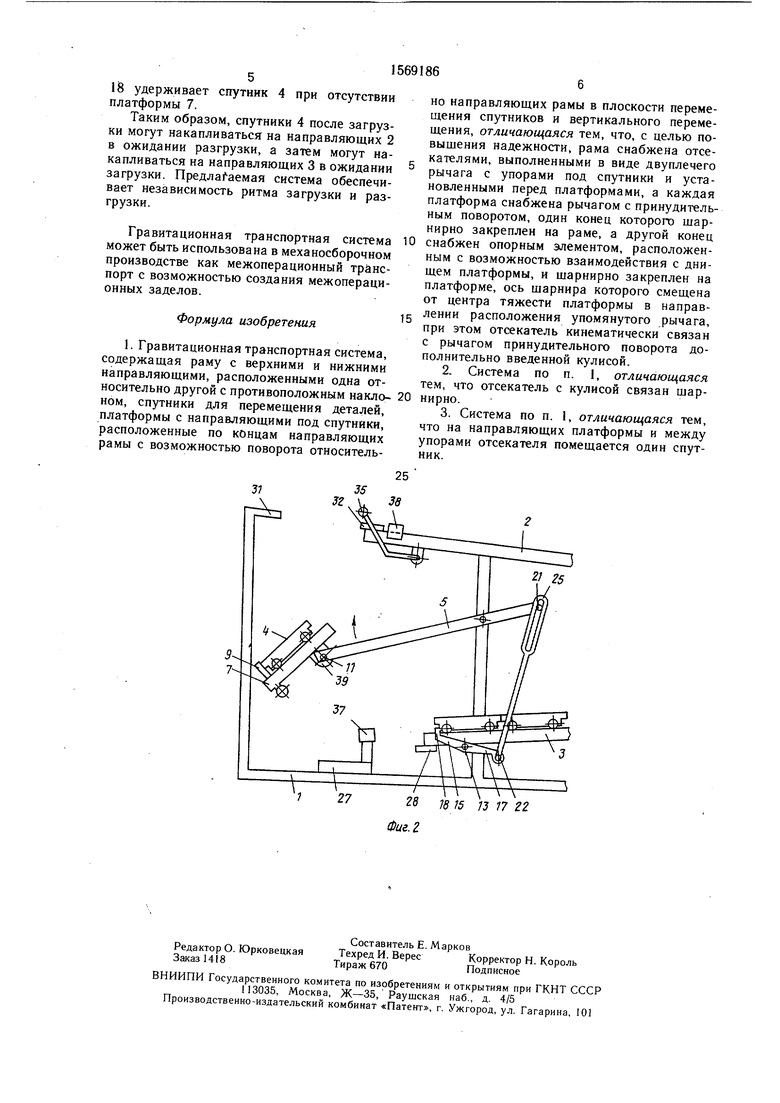
На фиг. 1 изображена принципиальная схема транспортной системы; на фкг. 2 - проупора 20 первый спутник 4 перемещается до упора 10 по направляющим платформы 8, находящейся в верхнем положении на упорах 33 и 34, а следующий спутник 4 отсекается поднявшимся упором 19. Транспортируемая деталь снимается со спутника, стоящего на платформе 8, и затем по команде оператора включается привод на опускание рычага 6. При этом платформа 8 за счет смещения центра тяжести
межуточное положение платформы со спут- 10 наклоняется до касания рычага 6, и спутником,ник 4, упираясь в упор 10, не скатыва- Гравитационная транспортная система со- ется назад. При дальнейшем опускании ры- держит раму 1 с верхними направляющими 2 и нижними направляющими 3, спутники
чага 6 платформа 8 доходит до упоров 29 .и 30 и в нижнем положении совпа4 и подъемники, установленные на входе .,. дает с направляющими 3. Спутник 4 скатывается по направляющим 3 до упора 17 двуплечего рычага 15 или до впереди стоящего спутника 4. При опускании рычага 6 шарнир 23 скользит по пазу тяги 26, дои выходе транспортной системы. Подъемники состоят из принудительно поворотных рычагов 5 и 6 и платформ 7 и 8 с направляющими под спутники 4 и упорами 9 и 10. Приводные рычаги шарнирно связаны с рамой 1 и платформами 7 и 8, причем 20 нир 24 поворачивает двуплечий рычаг 16, шарниры 11 и 12 платформы смещены отопуская упор 19 и поднимая упор 20, к
ходит до его конца, и тяга 26 через шарцентров тяжести платформ в сторону приводных рычагов На верхних и нижних направляющих перед платформами на шарнирах 13 и 14 установлены отсекатели, выполненные в виде двуплечих рычагов 15 и 16 с упорами 17-20 на концах плеч, которые связаны с рычагами 5 и 6 при помощи шарниров 21-24 и тяг 25 и 26. Последние снабжены пазами, в которых пе25
которому скатывается спутник 4. При этом вес тяги 26 способствует повороту рычага 16 против часовой стрелки, а упор 20 удерживает спутник 4 при отсутствии платформы 8.
После скатывания спутника 4 с направляющих платформы 8 на направляющие 3 путевой выключатель 36 включает привод на подъем рычага 6 до возвращения в верхнее
ремещаются шарниры 21 и 23 приводных Зо положение подвижных направляющих. При
рычагов 5 и 6. На раме I имеются нижние 27-30 и верхние 31-34 упоры, а также управляемый упор 35. На раме 1 верхних и нижних направляющих 2 и 3 размещены путевые выключатели 36-38. На платформах 7 и 8 и между упорами 17-20 двуплечих рычагов 15 и 16 может разместиться один спутник 4 Рычаги 5 и 6 оканчиваются опорными элементами 39, ограничивающими поворот платформ
этом шарнир 23 скользит по пазу тяги 26, доходит до его конца, и тяга 26 через шарнир 24 поворачивает двуплечий рычаг 16, опуская упор 20 и поднимая упор 19, отсекающий спутник 4.
35 Дальнейшее продвижение спутника 4, находящегося на направляющих 3, происходит при повороте двуплечего рычага 15, опусканий упора 17 до поднявшегося упора 18. Затем при обратном повороте двуплечего рычага 15 и опускании упора 18 пер- Гравитационная транспортная система 40 вый спутник скатывается на платформу 7, работает следующим образом.находящуюся в нижнем положении, а слеВ исходной позиции транспортируемаядующий спутник 4 отсекается упором 17.
деталь укладывается на спутник 4, стоящийПосле попадания спутника 4 на платфорна платформе 7, которая находится в верх-му 7 путевой выключатель 37 включает
нем положении и упирается в упоры 3 и 32 4(- подъем рычага 5 до прихода в верхнее рамы 1, совпадая с верхними направляю-положение платформы 7. При этом последняя в процессе подъема за счет смещения центра тяжести наклоняется до касания рычага 5, и спутник 4, упираясь в упор 9, не скатывается назад.
50 При скатывании спутника 4 с направляющих платформы 7 путевой выключатель 38 включает опускание рычага 5.
При подъеме или опускании рычага 5 шарнир 2 скользит по пазу тяги 25, доходит до его конца, и тяга 25 через шар- исходит при повороте двуплечего рычага 16 55 нир 22 поворачивает двуплечий рычаг 15, мимо опустившегося упора 19 до подняв-поднимая или опуская упоры 17 и 18.
При этом вес тяги 25 способствует повороту рычага 15 по часовой стрелке и упор
щими 2. Спутник 4 удерживается от скатывания по направляющим 2 управляемым упором 35.
Для отправки загруженного спутника 4 по команде оператора- опускается управляемый упор 35, и спутник 4 катится по направляющим 2 до упора 19 двуплечего рычага 16 или до впереди стоящего спутника 4.
Дальнейшее продвижение спутника 4 прошегося упора 20. Затем при обратном повороте двуплечего рычага 16 и опускании
упора 20 первый спутник 4 перемещается до упора 10 по направляющим платформы 8, находящейся в верхнем положении на упорах 33 и 34, а следующий спутник 4 отсекается поднявшимся упором 19. Транспортируемая деталь снимается со спутника, стоящего на платформе 8, и затем по команде оператора включается привод на опускание рычага 6. При этом платформа 8 за счет смещения центра тяжести
нир 24 поворачивает двуплечий рычаг 16, опуская упор 19 и поднимая упор 20, к
ходит до его конца, и тяга 26 через шарнир 24 поворачивает двуплечий рычаг 16, опуская упор 19 и поднимая упор 20, к
которому скатывается спутник 4. При этом вес тяги 26 способствует повороту рычага 16 против часовой стрелки, а упор 20 удерживает спутник 4 при отсутствии платформы 8.
После скатывания спутника 4 с направляющих платформы 8 на направляющие 3 путевой выключатель 36 включает привод на подъем рычага 6 до возвращения в верхнее
положение подвижных направляющих. При
18 удерживает спутник 4 при отсутствии платформы 7.
Таким образом, спутники 4 после загрузки могут накапливаться на направляющих 2 в ожидании разгрузки, а затем могут накапливаться на направляющих 3 в ожидании 5 загрузки. Предлагаемая система обеспечивает независимость ритма загрузки и разгрузки.
но направляющих рамы в плоскости перемещения спутников и вертикального перемещения, отличающаяся тем, что, с целью повышения надежности, рама снабжена отсе- кателями, выполненными в виде двуплечего рычага с упорами под спутники и установленными перед платформами, а каждая платформа снабжена рычагом с принудительным поворотом, один конец которого шар- нирно закреплен на раме, а другой конец Гравитационная транспортная система 10 снабжен опорным элементом, расположен- может быть использована в механосборочном ным с возможностью взаимодействия с днищем платформы, и шарнирно закреплен на платформе, ось шарнира которого смещена от центра тяжести платформы в направ- 15 лении расположения упомянутого рычага, при этом отсекатель кинематически связан с рычагом принудительного поворота дополнительно введенной кулисой.
платформы с направляющими под спутники, что на направляющих платформы и между расположенные по концам направляющих упорами отсекателя помещается один спут- рамы с возможностью поворота относитель- ник.
производстве как межоперационный транспорт с возможностью создания межоперационных заделов.
Формула изобретения
1 27
1pi 28 18 15 П 17 22
| Загрузочное устройство | 1985 |
|
SU1301629A1 |
