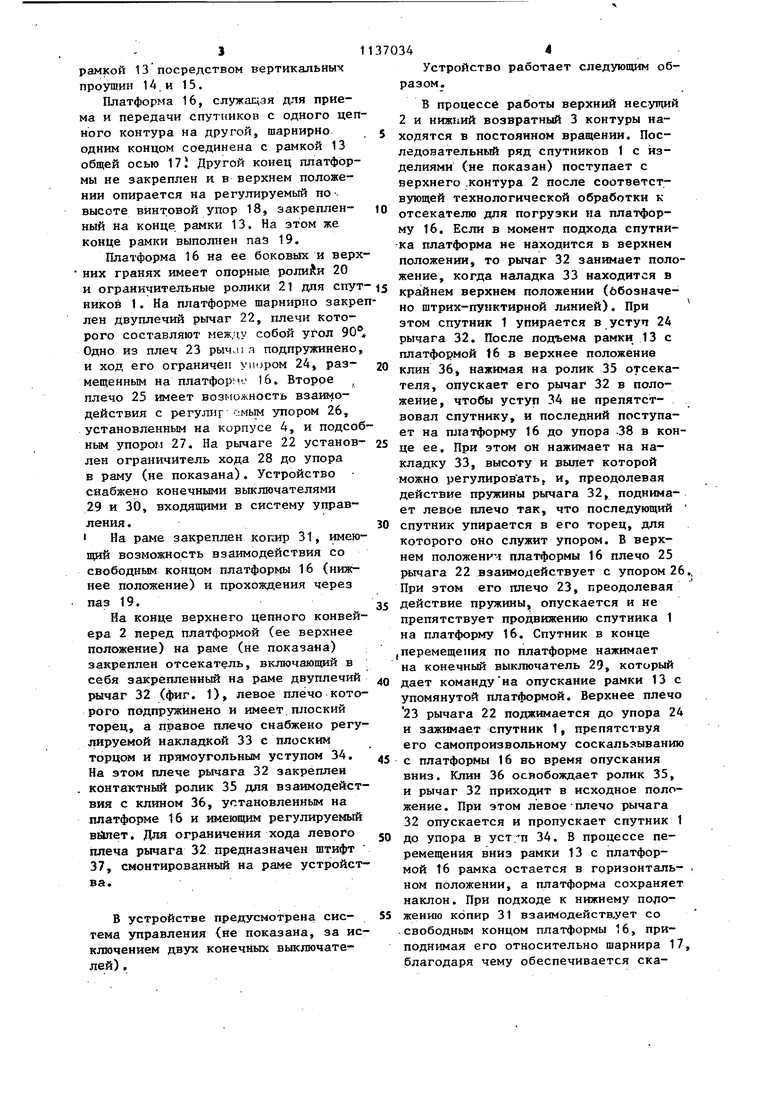
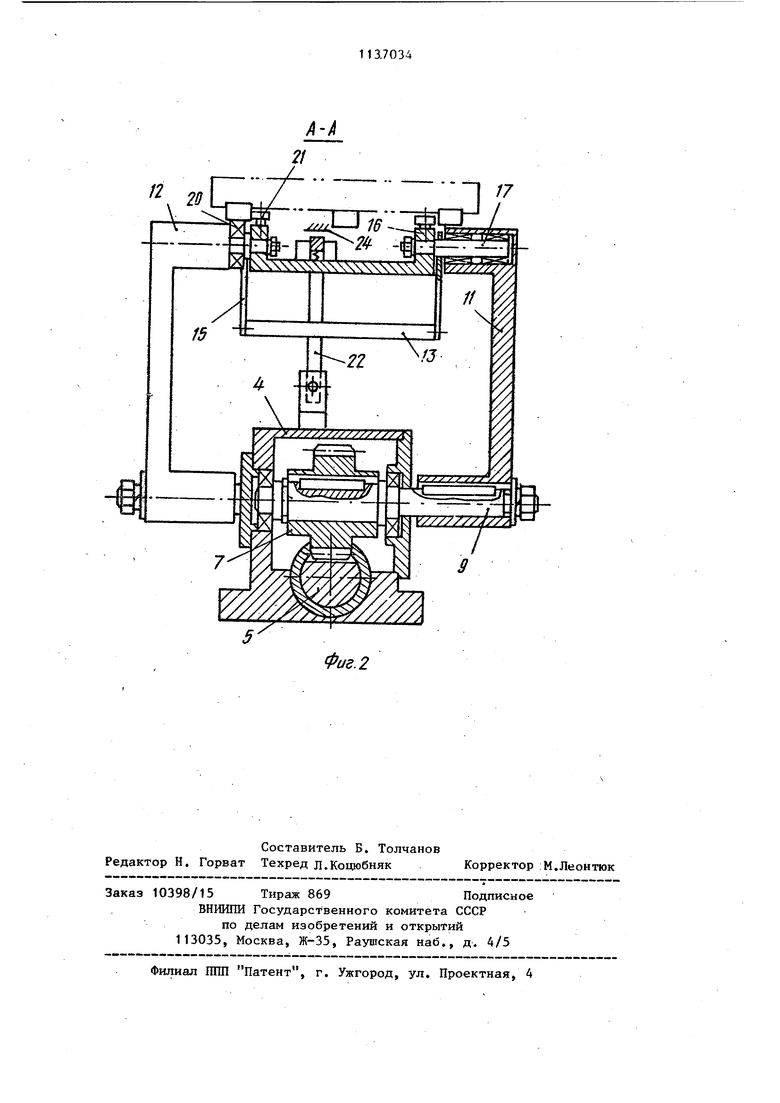
111 Изобретение относится к транспорт ным средствам со -спутниками, в частности к средстрам для подъема и опус кания спутников с одного уровня на другой, и может использоваться в несинхронных транспортерах, используемых в автоматизированных линиях и поточных линиях механической обработки, сборки и испь тгния. Известно транспортирующее устройство, включшощее раму с опорагш, на которой размещены один под другим два цепных конвейера со спутниками и парными звездочками на каждом вейущем и ведомом валах, механизм фиксации со столом и прижимом, подъемно-опускные секции, каждая из которых с ПРИВОДОМ, платформой и рд положенным перед ней отсекателем Недостаток подъемно-опускных секций, входящих в состав транспортирую щего устройства, заключается в сложности их конструктивного исполнения и необходимости регулирования вертикального и углового перемещения. Кро ме того, отсекатели снабжены поршнев1Л4и приводами, что также усложняет конструкцию. В итоге все указанные недостатки сказьшаются на надежности работы, снижая ее. Известноустройство для опускания спутников с одного уровня на другой, включающее платформу, связанную с приводом шарнирно-рычажной системой через шестерню одного из рычагов пос ледней и рейку, и установленные на платформе клин и двуплечий рычаг, взаш- одействующие соответственно с роликом отсекателя и упорами, размещенными на уровнях подачи и приема спутников 25. Вшюлнение привода платформы в ви де зубчато-реечной передачи с ведущим и ведомым рычата 1и не обеспечивает стабильное перемещение платформы в угловом отношении, приводит в ряде случаев при прохожден ии горизон тального участка к pasBofioTy )и даже опрокидыванию пяатфор ш под действием неуравновешенного оярокидывающего момента. Наклон платформы в верхнем и нижнем положениях за счет разной длины рычагов исключает возможность его регулирования что згхудагает условия эксплуатации в сочетании с конвейером Фактически величина наклона зависит от размеров элементов рычажной систе мы и величины угла поворота ведущего рычага, поэтому регулирование хода (угла поворота рычага) нарушает угол наклона платформы. Цель изобретения - повьщ1ение надежности работы устройства. Поставленная цель достигается тем, что устройство для опускания спутников с одного уровня на другой, включающее платформу, связанную с приводом шарнирно-рычажной системой через шестерню одного из рычагов последней, и рейку, и установленные на платформе клин и двуплечий рЫчаг, взаимодействующие соответственно с роликом отсекателя и упорами, размещенными на уровнях подачи и приема спутников, снабжено копиром, размещанным на уровне приема спутников, и дополнительной шестерней, установленной на другом рычаге, шарнирнорычажной системы с возможностью взаимодействия с рейкой, при этом рычаги параллельны и имеют равную длину, а платформа связана с шарнирно-рычажной системой с помощыо рамки, шар- нирно укрепленной на свободных от шестерен концах рычагов, выполненной с проемом для прохода копира и имеющей репулируемьй упор, причем платформа установлена на рамке одним концом шарнирно, а другим с возможностью взаимодействия с регулируемым упором и копиром. На фиг. 1 изображено предлагаемое устройство; на фиг. 2 - разрез А-А на фиг. 1. Устройство для опускания спутников 1 с одного уровня на другой двух расположенных- один под другим контуров параллельных бесконечных тяговых втулочно-роликовы цепей 2 и 3 смонтировано с ними на одной общей раМе (не показана). . Устройство для подъема ТГЪпускания содержит корпус редуктора А (смонтирован на раме) с размещенной в нем зубчатой рейкой 5 с поршневым приводом 6, входящей в зацепление с основной и дополнительной шестернями 7 и 8, сидящими соответственно на одном валу 9 и 10 с рычагами 11 и 12, Рычаги данной рычажной системы жестко связаны с валами. Межосевое расстояние между шестернями 7 и 8 кратно шагу зубчатых пар. Рычаги выполнены равной длины, расположены параллельно друг другу и шарнирно связаны с горизонтальной рамкой 13 посредством вертикальных проушин 14.и 15. Платформа 16, служащая для приема и передачи спутников с одного цеп ного контура на другой, шарнирно одним концом соединена с рамкой 13 общей осью 17 Другой конец платформы не закреплен и в верхнем положении опирается на регулируемый по высоте винтовой упор 18, закрепленный на конце рамки 13. На этом же конце рамки выполнен паэ 19. Платформа 16 на ее боковых и вер них гранях имеет опорные рояиАи 20 и ограничительные ролики 21 для спу ников 1. На платформе шарнирно закр лен двуплечий рычаг 22, плечи которого составляют между собой угол 90 Одно из плеч 23 рыч,п л подпрзгжинено и ход его ограничен упором 24, размещенным на платформе 16. Второе плечо 25 имеет возг-южность взаимодействия с регулиг с;мь1м упором 26, установленным на корпусе 4, и подсо ным упором 27. На рычаге 22 установ лен ограничитель хода 28 до упора в раму (не показана). Устройство снабжено конечными выключателями 29 и 30, входящими в систему управления . На раме закреплен кокир 31, имею щий возможность взаимодействия со свободным конце платформы 16 (нижнее положение) и прохождения через паз 19. На конце верхнего цепного конвей ера 2 перед платформой (ее верхнее положение) на раме (не показана) закреплен отсекат§ль, включаюпц й в себя закрепленный на раме двуплечий рычаг 32 (фиг. t), левое плечо кото рого подпружинено и имеет плоский торец, а пеавое плечо снабжено регу лируемой накладкой 33 с плоским торцом и прямоугольным уступом 34. На этом плече рычага 32 закреплен контактный ролик 35 для взаимодейст вия с клином 36, установленным на платформе 16 и имеющим регулируемый . Для ограничения хода левого плеча рычага 32 предназначен штифт 37, смонтированный на раме устройст ва. В устройстве предусмотрена система управления (не показана, за ис ключением двух конечных выключателей) , 344 Устройство работает следующим образом. В процессе работы верхний несущий 2 и возвратный 3 контуры находятся в постоянном вращении. Последовательный ряд спутников 1 с изделиями (не показан) поступает с верхнего .контура 2 после соответствующей технологической обработки к отсекателю для погрузки на платформу 16. Если в момент подхода спутника платформа не находится в верхнем положении, то рычаг 32 занимает положение, когда наладка 33 находится в крайнем верхнем положении (ббозначе„ штрих-пунктирной линией). При зтом спутник 1 упирается в уступ 24 рычага 32. После подъема рамки 13 с платформой 16 в верхнее положение клин 36, нажимая на ролик 35 отсекателя, опускает его рычаг 32 в положение, чтобы уступ 34 не препятствовал спутнику, и последний поступает на платформу 16 до упора -38 в конце ее. При этом он нажимает на накладку 33, высоту и вылет которой можно регулировать, и, преодолевая действие пружины рычага 32, поднимает левое плечо так, что последующий спутник упирается в его торец, для которого оно служит упором. В верхнем положении платформы 16 плечо 25 рычага 22 взаимодействует с упором 26., При зтом его плечо 23, преодолевая действие пружины, опускается и не препятствует продвижению спутника 1 на платформу 16. Спутник в конце Перемещения по платформе нажимает на конечный выключатель 29, который дает командуна опускание рамки 13 с упомянутой платформой. Верхнее плечо 23 рычага 22 поджимается до упора 24 и зажимает спутник 1, препятствуй его самопроизвольному соскальзыванию с платформы 16 во время опускания вниз. Клин 36 освобождает ролик 35, и рычаг 32 приходит в исходное положение. При этом левое плечо рычага 32 опускается и пропускает спутник 1 до упора в уст.п 34. В процессе перемещения вниз рамки 13 с платформой 6 рамка остается в горизонталь- , ном положении, а платформа сохраняет наклон. При подходе к нижнему no ioжению копир 31 взаимодейстВхУет со свободным концом платформы 16, приподнимая его относительно шарнира 17, благодаря чему обеспечивается скатывание спутника по роликам на нижний цепной контур 3. При этом после опускания рамки 13 с платформой 16 в нижнее положение рычаг 22 с помощью упора 27 отводится так, что его плечо 23 утапливается, и спутник по роликам 20 соскальзьгоает на цепь 3 нижнего контура и по ней поступает на дальнейшие операции, где под-ьем осзпцествляют с помощью подобного устройства, тстько снизу вверх. При этом спутник t нажимает на конечный выключатель 30, который подает команду на подъем рамки 13 с платформой 16 с помощью поршневого привода 6. Далее цикл повторяют. .
Вьтолнение обоих рычагов в предлагаемом устройстве приводньми исключает влияние опрокидывающего момента и обеспечивает расчетное положение рамки (горизонтальное) нг всех участках траектории ее перемещения.
Шарнирное крепление одного конца платформы на передней части рамки, наличие в задней ее части паза и регулируемых упоров, а также йопир обеспечивает возможность регулирования угла наклона платформы для обеспечения надежного самопроизвольного безударного соскальзьгаания спутника с роликов платформы на соответствующую ветвь транспортера.
Фиг. 2
:j
| название | год | авторы | номер документа |
|---|---|---|---|
| Транспортирующее устройство | 1979 |
|
SU876515A1 |
| УСТРОЙСТВО ДЛЯ ПОШТУЧНОЙ ВЫДАЧИ ИЗДЕЛИЙ ИЗ СТОПЫ | 1990 |
|
RU2006436C1 |
| УСТАНОВКА ДЛЯ УКЛАДКИ ШТУЧНЫХ ИЗДЕЛИЙ В КАРТОННЫЕ ЯЩИКИ | 1991 |
|
RU2005678C1 |
| Гравитационная транспортная система | 1988 |
|
SU1569186A1 |
| Устройство для намотки ленты на катушку на текстильных машинах | 1966 |
|
SU268949A1 |
| Перегрузочное устройство | 1987 |
|
SU1602833A1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ГРУЗОНЕСУЩЕГО СРЕДСТВА С ГРУЗОВОЙ ПЛАТФОРМЫ ПОДЪЕМНИКА НА ПЛОЩАДКУ ПОГРУЗКИ-РАЗГРУЗКИ | 1999 |
|
RU2152340C1 |
| Устройство для загрузки подвесок подвесного конвейера | 1987 |
|
SU1507695A1 |
| Многопозиционный автомат для сборки корпусных деталей с деталями типа подшипников и крышек | 1974 |
|
SU545443A1 |
| Стенд для вырезки клиньев из профильного проката | 1977 |
|
SU659305A1 |
УСТРОЙСТВО ДЛЯ ОПУСКАНИЯ СПУТНИКОВ С ОДНОГО УРОВНЯ НА ДРУГОЙ, включающее платформу, связанную с приводом шарнирно-рычажной системой через шестерню одного из рычагов . последней, и рейку, и установленные на платформе клин и двуплечий рычаг, взаимодействующие соответственно G роликом отсекателя и упорами, размещенными на уровнях подачи и приема спутников, отличаю-, щ е е с я тем, что, с целью повьшения надежности устройства в работе, оно снабжено копиром, размещенньм на уровне приема спутников, и дополнительной шестерней, установленной на другом рычаге шарнирно-рычажной системы с возможностью взаимодействия с рейкой, при этом рычаги параллельны и имеют равную длину, а платформа связана с шарнирно-рычажной системой с помощью рамки, шарнирно укрепленной на свободных от шестерен концах рычагов, выполненной с проеО) мом для прохода копира и имеющей регулируемый упор, причем платформа установлена на рамке одним концом шарнира, а другим - с возможностью взаимодействия с регулируемым упором и копиром.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Рабочие, чертежи № 151.060 | |||
| Разраб | |||
| Павлодарский проектно-конструкторский технологиче кий институт | |||
| Утв | |||
| Походная разборная печь для варки пищи и печения хлеба | 1920 |
|
SU11A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Транспортирующее устройство | 1979 |
|
SU876515A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
