(54) ПРИВОД ШАГАЮЩЕГО КОНВЕЙЕРА
| название | год | авторы | номер документа |
|---|---|---|---|
| Шагающий конвейер | 1971 |
|
SU703437A1 |
| Шаговый конвейер | 1977 |
|
SU648477A1 |
| Шаговый конвейер | 1986 |
|
SU1411241A1 |
| Устройство для перегрузки изделий | 1983 |
|
SU1181968A1 |
| Шагающий конвейер | 1979 |
|
SU829500A1 |
| Шагающий конвейер | 1983 |
|
SU1183434A1 |
| УСТРОЙСТВО ШАГОВОЙ ТРАНСПОРТИРОВКИ | 1993 |
|
RU2071443C1 |
| Подъемно-опускная секция рольганга | 1983 |
|
SU1113347A1 |
| Шагающий конвейер-накопитель | 1985 |
|
SU1270075A1 |
| РЫЧАЖНЫЙ ФИКСАТОР ДЛЯ ОРИЕНТАЦИИ И ЗАЖИМАИЗДЕЛИЙ | 1970 |
|
SU275840A1 |
I
Изобретение относится к транспортному оборудованию и может быть использовано в литейных, сварочных и других цехах в качестве технологического транспорта.
Известен шагаюшнй конвейер, включающий неподвижную раму и подвижную раму, имеющую вертикальное и горизонтальное перемещение от отдельных приводов 1 .
Цикл работы конвейера включает операции подъема подвижной рамы с подхватом груза, горизоитальное перемещение, опускание подвижной рамы с посадкой груза на неподвижную раму и горизонтальное холостое перемещение подвижной рамы в обратную сторону. Реверсирование перемещения грузов конвейером достигается изменением порядка операций в цикле - горизонтальное перемещение подвижной рамы, подъем ее с грузом, горизонтальное перемещение с грузом в обратную сторону, опускание подвижной рамы.
К недостатку конвейера следует отнести сложность его ввиду наличия двух отдельных приводов.
Наиболее близким к предлагаемому является йривод шагающего конвейера, содержащий щарнирно закрепленные на неподвижной раме конвейера двуплечие рычаги, соединенные тягой и установленные с возможностью взаимодействия с упорами подвижной рамы конвейера, запорный механизм привода, установленный с возможностью взаимодействие с двуплечим рычагом, и гидробуфер, связанный с одним из двуплечих рычагов.
10
При перемещении подвижной рамы от привода ее упоры поворачивают двуплечие рычаги на равные углы по отнощению к вертикали при движении рамы вперед и назад. Разность упомянутых углов определяет вертикаль15ный ход подвижной рамы. Гидробуфер предохраняет подвижную раму с грузом от свободного перемещения вниз, а запорное устройство обеспечивает надежную фиксацию рычагов при поднятой раме с грузом. Величина подвижной
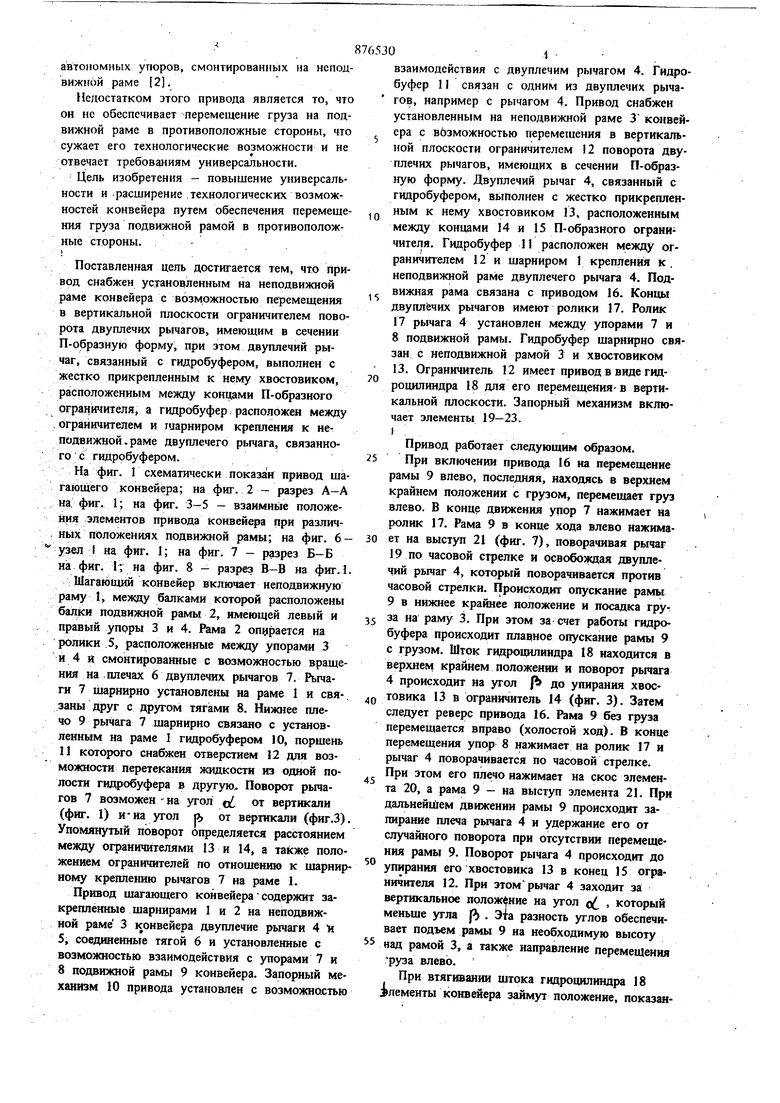
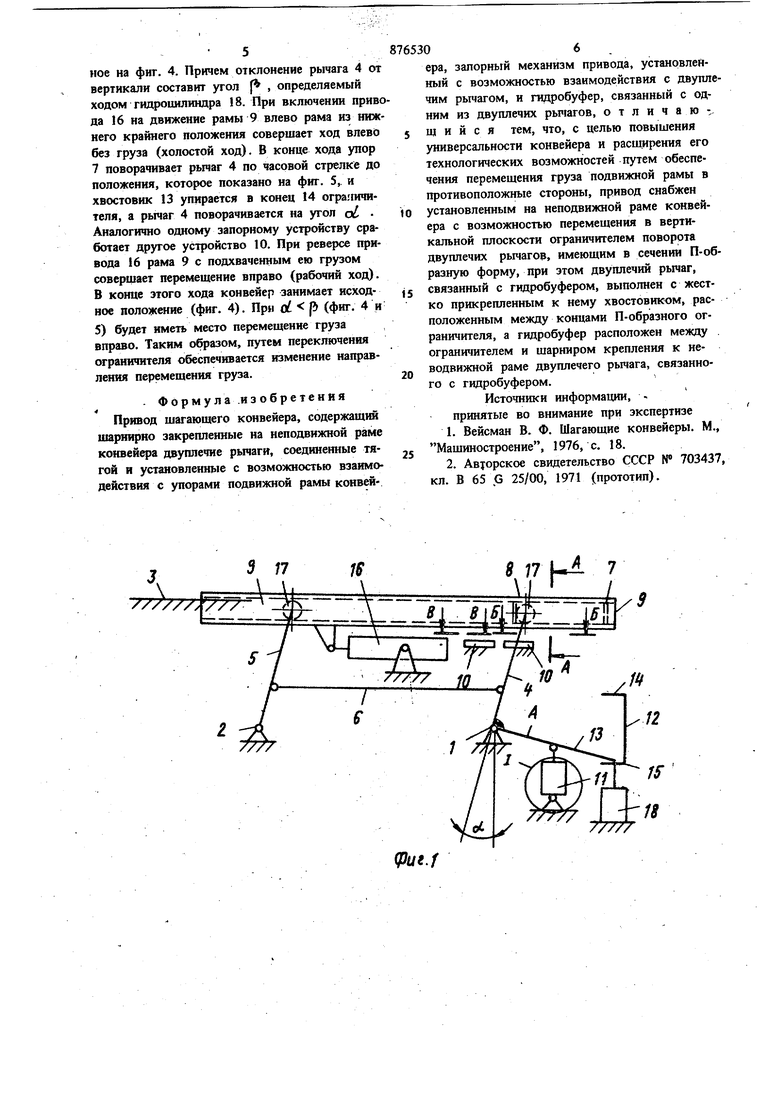
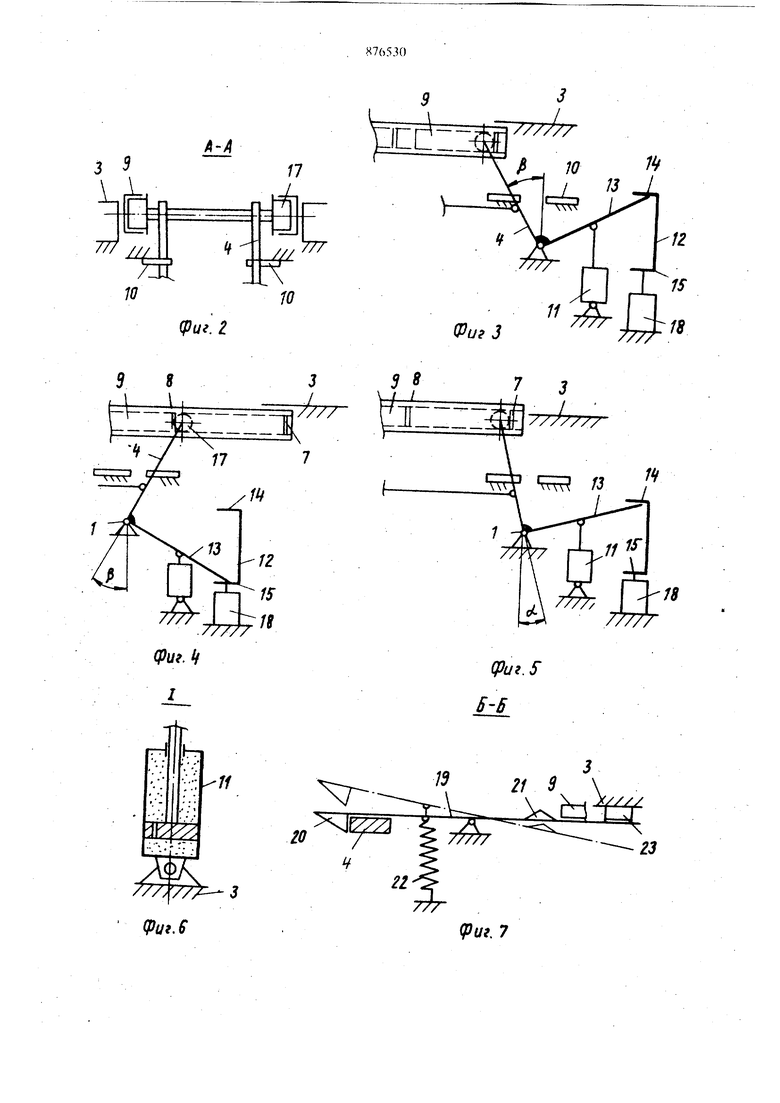
20 рамы горизонтального хода зависит от хода привода и расстановки упоров на подвижной раме, а величина поворота рычагов зависит от хода гидробуфера или же от расположения автономных упоров, смонтированных на неподвижной раме 2. Недостатком этого привода является то, что он не обеспечивает перемещение груза на подвижной раме в противоположные стороны, что сужает его технологические возможности и не отвечает требованиям универсальности. Цель изобретения - повышение универсаль нести и расширение технологических возможностей конвейера путем обеспечения перемещения груза подвижной рамой в противоположные стороны. 1 Поставленная цель достигается тем, что привод снабжен установленным на неподвижной раме конвейера с возможностью перемещения в вертикальной плоскости ограничителем поворота двуплечих рычагов, имеющим в сечении П-образную форму, при этом двуплечий рычаг, связанный с гидробуфером, выполнен с жестко прикрепленным к нему хвостовиком, расположенным между концами П-образного ограничителя, а гвдробуфер: расположен между . ограничителем и гиарниром крепления к неподвижной. раме двуплечего рычага, связанногос гидробуфером. На фиг. 1 схематически показан привод ша гающего конвейера; на фиг. 2 - разрез А-А на. фиг. 1; на фиг. 3-5 - взаимньге положения элементов привода конвейера при различных положениях подвижной рамы; на фиг. 6- узел I на фиг. 1; на фиг. 7 - разрез Б-Б
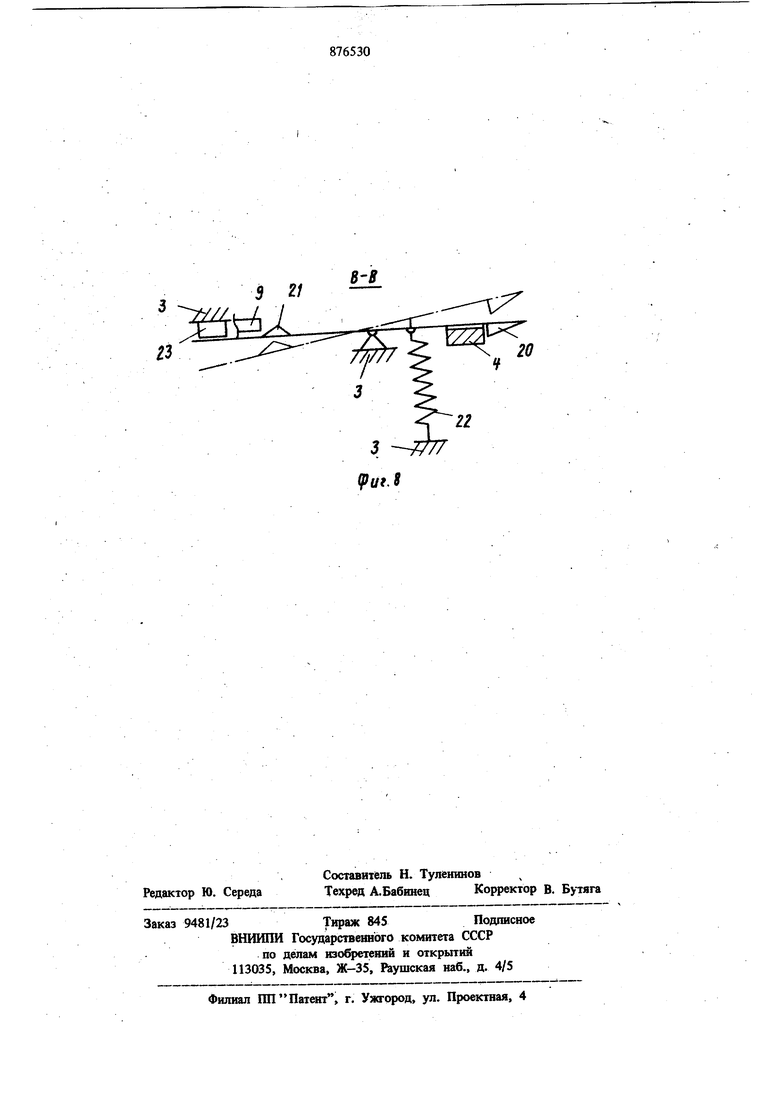
иа фиг. 1; на фиг. 8 - разрез В-В на фиг. 1.
; Шагающий конвейер включает неподвижную раму 1, между балками которой расположены балки подвижной рамы 2, имеющей левый и правый упоры 3 и 4. Рама 2 опирается на ролики 5, расположенные между упорами 3 и 4 и смонтированные с возможностью вращения на .плечах 6 двуплечих рычагов 7. Рычаги 7 щарнирно установлены на раме 1 и свя-. зань друг с другом тягами 8. Нижнее плечо 9 рычага 7 щарнирно связано с установленным на раме I гидробуфером 10, порщень II которого снабжен отверстием 12 для возможности перетекания жидкости из одной полости гндробуфера в другую. Поворот рычагов 7 возможен-на угол cL от вертикали (фиг. 1) и-иа угол л от вертикали (фиг.З). Упомянутый поворот определяется расстоянием между ограничителями 13 и 14, а также положением ограничителей по отношению к щарнирному крепле шю рычагов 7 на раме 1.
Привод шагающего конвейера содержит закрепленные шарнирами I и 2 на неподвижной раме 3 конвейера двуплечие рычаги 4 и 5, соединенные тягой 6 и установленные с возможностью взаимодействия с упорами 7 и 8 подвижной рамы 9 конвейера. Запорный механизм 10 привода установлен с возможностью
чий рычаг 4, который поворачивается против часовой стрелки. Происходит опускание рамьг 9 в нижнее крайнее положенне и посадка груг
за на раму 3. При этом за счет работы гидробуфера происходит плавное опускание рамы 9 с грузом. Шток гидроцилиидра 18 находится в верхнем крайнем положении и поворот рьпага 4 происходит на угол /Ь до упнрания хвоеQ товика 13 в ограничитель 14 (фиг, 3). Затем следует реверс привода 16. Рима 9 без груза перемещается вправо (холостой ход). В конце перемещения упор 8 нажимает на ролик 17 и рычаг 4 поворачивается по часовой стрелке. При этом его плечо нажимает на скос злемента 20, а рама 9 - на выступ элемента 21. При дальнейи ем движении рамы 9 происходит запирание плеча рычага 4 и удержание его от случайного поворота при отсутствии перемещения рамы 9. Поворот рычага 4 происходит до упирания его хвостовика 13 в конец 15 ограничителя 12. При этом рычаг 4 заходит за вертикальное положение на угол о , который меньше угла р) . Э4а разность углов обеспечивает подъем рамы 9 на необходимую высоту
5 над рамой 3, а также направление перемещения руза влево.
При втягивании щтока гидроцилиндра 18 Элементы конвейера займут положение, показанвзаимодействия с двуплечим рычагом 4. Гидробуфер 11 связан с одним из двуплечих рычагов, например с рычагом 4. Привод снабжен установленным на неподвижной раме 3 конвейера с возможностью перемещения в вертикальной плоскости ограничителем 12 поворота двуплечих рычагов, имеющих в сечении П-образную форму. Двуплечий рычаг 4, связанный с гидробуфером, выполнен с жестко прикрепленным к нему хвостовиком 13, расположенным между концами 14 и 15 П-образного ограничителя. Гидробуфер 11 расположен между ограничителем 12 и щарниром 1 крепления к. неподвижной раме двуплечего рычага 4. Подвижная рама связана с приводом 16. Концы двуплечих рычагов имеют ролики 17. Ролик 17 рычага 4 установлен между упорами 7 и 8 подвижной рамы. Гидробуфер шарнирно связан с неподвижной рамой 3 и хвостовиком 13. Ограничитель 12 имеет привод в виде гндроцилиндра 18 для его перемещения-в вертикальной плоскости. Запорный механизм включает элементы 19-23. Привод работает следующим образом. При включении приводу 16 на перемещение рамы 9 влево, последняя, находясь в верхнем крайнем положении с грузом, перемещает груз влево. В конце движения упор 7 нажимает на ролик 17. Рама 9 в конце хода влево нажимает на выступ 21 (фиг. 7), поворачивая рычаг 19 по часовой стрелке и освобождая двуплеHoe на фиг. 4. Причем отклонение рычага 4 от вертикали составит угол f , определяемый ходом гидроцилиндра 18. При включении приво да 16 иа движение рамы 9 влево рама из нижнего крайнего положеикя совершает ход влево без груза (холостой ход). В конце хода упор 7 поворачивает рычаг 4 по часовой стрелке до положения, которое показано на фиг. 5, и хвостовик 13 упирается в конец 14 ограгсичителя, а рычаг 4 поворачивается на угол об Ана;1огично одному запорному устройству сработает другое устройство 10. При реверсе привода 16 рама 9 с подхваченным ею грузом совершает перемещение вправо (рабочий ход). В конце зтого хода конвейер заннмает исходное положение (фиг. 4). При (фиг- и 5) будет иметь место перемещение груза вправо. Таким образом, путем переключения ограничителя обеспечивается изменение направления перемещения груза. Формула .изобретения Привод шагающего конвейера, содержащий шарнирно закрепленные на неподвижной раме конвейера двуплечие рычаги, соединенные тягой и установленные с возможностью взаим о действня с упорами подвижной рамы конвеи8 17 (А 7 I I/
/////
(Put.f 6 ера, залорный механизм привода, установленный с возможностью взаимодействия с двуплечим рычагом, и падробуфер, связанный с одним из двуплечих рьиагов, о т л и ч а ю -, щ н и с я тем, что, с целью повышения универсальности конвейера и расширения его технологических возможностей путем обеспечення перемещения груза подвижной рамы в противоположные стороны, привод снабжен установлеш1ым на неподвижной раме конвейера с возможностью перемещения в вертикальной плоскости ограничителем поворота двуплечих рычагов, имеющим в сечении П-образную форму, при зтом двуплечий рычаг, связанш,1й с гидробуфером, выполнен с жестко прнкрештенным к нему хвостовиком, расположенным между концами П-образного ограничителя, а гидробуфер расположен между ограничителем и шарниром крепления к неводвижной раме двуплечего рычага, связанного с гидробуфером., Источники информации, принятые во внимание при зкспертизе 1.Вейсман В. Ф. Шагающие конвейеры. М., Машиностроение, 1976, с. 18 2.Авторское свидетельство СССР N /U:J4J/, кл. В 65 G 25/00, 1971 (прототип).
л-А
3 3
П
.
(риг. Z
1
ЛIII
/
/777/
(pui.S Е-В
ь
Л
///Y/, (риг.6
V
U Wcdi
///
гз
(риг. 7
