Изобретение относится к промышлен- itoMy транспорту, в частности к конвейерам с циклическим движущимися грузо- Йосителями.и может быть использовано Для механизации перемещения штучных i py3OB как самостоятельно, так ив фоставе технологического оборудовап I|HH горизонтально и под углом к го- 1 изонту, не превьпиающим угол трения транспортирования изделия о раму 1:овейера.
Цель изобретения - обеспечение 1 еверсивной работы конвейера.
На фиг.1 изображен шаговый кон- йейер, разрез, момент, когда при опущенных переключающих упорах подвиж- Ная рама начинает рабочий ход; на фиг.2 - то же, при промежуточном полены на подвижной раме 12, установленной с возможностью возвратно-nocj тупательного перемещения на роликах 13 по направляющим неподвижной рамы 1 с помощью привода 14 возвратно- поступательного перемещения подвижной рамы. Упоры 10 и 11 имеют два фиксированных положения: верхнее В
jQ и нижнее Н. Для прохода консолей 9 ролики 13 имеют проточку. Ролики 15 центрируют раму 12 в направляющих неподвижной рамы 1. Рычаги 4 и 5 имеют ограничители их поворота, которые
15 могут быть выполнены как одно целое с рычагами (фиг.1-4) или выполнены в виде смонтированных на неподвижной раме 1 ограничителей 16 поворота, препятствующих их складыванию в одну
25
30
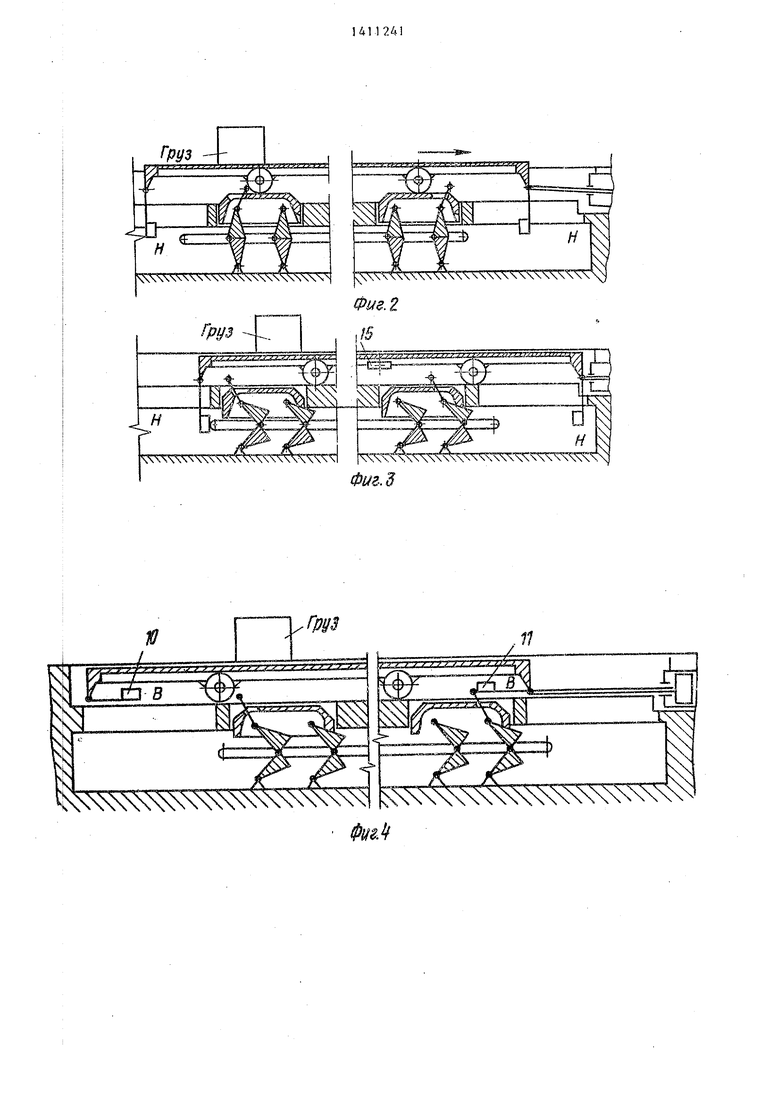
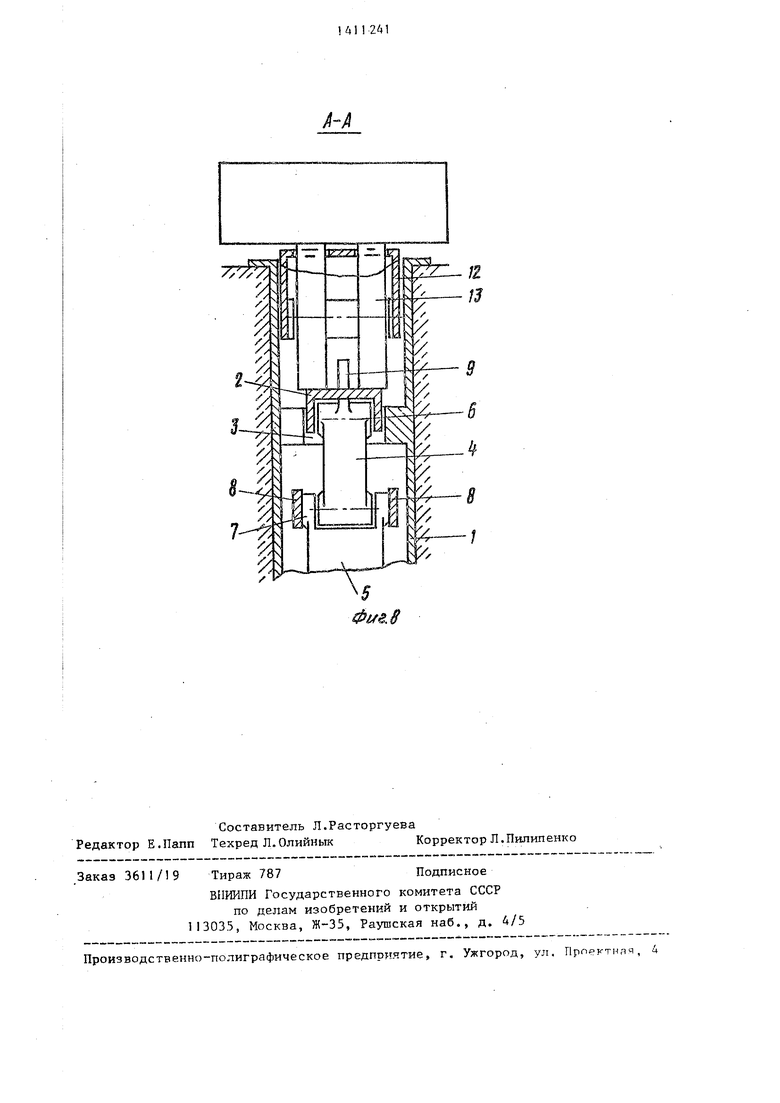
ложении подвижной рамы во время рабо-20 сторону (влево по фиг.1-4). Чрезмер- чего хода; на фиг.З - то же, при 1 райнем правом положении подвижной рамы, когда рабочий ход закончен; на фиг.4 - то же, при поднятых переключающих упорах и находящейся в начале холостого хода подвижной раме; на фиг.З - разрез А-А на фиг.1; ila фиг.6 - узел Т на фиг.1 (вариант сонструкции рычагов и ограничителей поворота рычагов); на фиг.7 и 8 - разрез А-А на фиг. (вариант конст- :зукции подвижной рамы, в котором ролики выступают над ее поверхностью в |1оложениях при опущенной (фиг.7) и поднятой (фиг.8) подвижной раме).
Шаговый конвейер содержит непод- :зижную раму 1 , копиры 2, расположен -. ;1ые в вертикальных направляющих - экнах 3 неподвижной рамы 1 с возмож- юстью перемещения в вертикальной 1лоскостй. Каждый копир 2 установлен ha неподвижной раме посредством двух Пар рычагов 4 и 5 ,при этом одни концы рычагов 4 и 5 в каждой паре щарнир- Но соединены, соответственно,с копиром 2 и неподвижной рамой 1 посредством осей 6, а другие концы рычагов 4 и 5 шарнирно соединены посредством осей 7 между собой и Со щтангой 8.
Рычаги 4 и 5 образуют со штангой 8 и, соответственно, с копиром 2 и не-: подвижной рамой 1 гаарнирнеы параллелограммы.
Крайние шарнирно соединенные с ко пирами рычаги 4 -выполнены с разме- щенными в окнах копиров 2 консолями 9 для взаимодействия с двумя передвижными регулируемыми переключающими упорами 10 и 11, которые установ35
40
45
50
55
ное складьшание рычагов 4 и 5 в противоположную сторону ограничено поверхностью 17 копиров 2. Штанга 8 расположена, с возможностью возвратно-поступательного перемещения в Направлении движения подвижной рамы 1 2. Регулируемые переключающие упоры
1О и 1 1 установлены с возможностью взаимодействия со штангой 8 и размещенными в окне копира 2 консолями 9.
Шаговый конвейер работает следующим образом.
Из положения, показанного на фиг.1, когда передвижные переключающие упоры 10 и 11 находятся внизу (положение Н ), а подвижная рама 1 2 сдвинута до отказа влево, при включении привода 14, например пневмоци- лиНдра, ролики 13 набегают на копиры
2и поднимают подвижную раму 12. Последняя принимает на себя с неподвижной рамы 1 транспортируемый груз и перемещает его вправо до тех пор, пока ролики 13, скатываясь с копиров 2, не опустят подвижную раму 12 до уровня неподвижной рамы 1. В этот момент переключающий упор 10, перемещающийся вместе с подвижной рамой 12, кос- нувщись левого торца штанги 8, начинает сдвигать ее вправо до тех пор, пока рычаги 4 и 5 не сложатся под собственным весом и весом копиров 2 до упора рычагов 4 в поверхность 17,
а копиры 2 в результате опустятся ниже поверхности неподвижной рамы 1. На этом ход вправо (рабочий } заканчивается. При ходе влево ролики 13 Прокатываются по поверхности неподвижной рамы 1, в том числе и по кронлены на подвижной раме 12, установленной с возможностью возвратно-nocj тупательного перемещения на роликах 13 по направляющим неподвижной рамы 1 с помощью привода 14 возвратно- поступательного перемещения подвижной рамы. Упоры 10 и 11 имеют два фиксированных положения: верхнее В
и нижнее Н. Для прохода консолей 9 ролики 13 имеют проточку. Ролики 15 центрируют раму 12 в направляющих неподвижной рамы 1. Рычаги 4 и 5 имеют ограничители их поворота, которые
могут быть выполнены как одно целое с рычагами (фиг.1-4) или выполнены в виде смонтированных на неподвижной раме 1 ограничителей 16 поворота, препятствующих их складыванию в одну
5
0
0 сторону (влево по фиг.1-4). Чрезмер-
5
0
5
0
5
ное складьшание рычагов 4 и 5 в противоположную сторону ограничено поверхностью 17 копиров 2. Штанга 8 расположена, с возможностью возвратно-поступательного перемещения в Направлении движения подвижной рамы 1 2. Регулируемые переключающие упоры
1О и 1 1 установлены с возможностью взаимодействия со штангой 8 и размещенными в окне копира 2 консолями 9.
Шаговый конвейер работает следующим образом.
Из положения, показанного на фиг.1, когда передвижные переключающие упоры 10 и 11 находятся внизу (положение Н ), а подвижная рама 1 2 сдвинута до отказа влево, при включении привода 14, например пневмоци- лиНдра, ролики 13 набегают на копиры
2и поднимают подвижную раму 12. Последняя принимает на себя с неподвижной рамы 1 транспортируемый груз и перемещает его вправо до тех пор, пока ролики 13, скатываясь с копиров 2, не опустят подвижную раму 12 до уровня неподвижной рамы 1. В этот момент переключающий упор 10, перемещающийся вместе с подвижной рамой 12, кос- нувщись левого торца штанги 8, начинает сдвигать ее вправо до тех пор, пока рычаги 4 и 5 не сложатся под собственным весом и весом копиров 2 до упора рычагов 4 в поверхность 17,
а копиры 2 в результате опустятся ниже поверхности неподвижной рамы 1. На этом ход вправо (рабочий } заканчивается. При ходе влево ролики 13 Прокатываются по поверхности неподвижной рамы 1, в том числе и по крон3u
кам окон 3, пронося подвижную раму 12 под грузом. В конце хода влево передвижной переключающий упор 1 I нажимает на правый торец штанги 8 и поворачивает рычаги Д и 5 до упора в ограничители 16 поворота. При этом копиры 2 будут вьщвинуты рычагами А и 5 из окон 3 вверх, а шаговый конвейер подготовлен к очередному рабо- чему ходу.
Реверсирование конвейера производится перемещением переключающих упоров 10 и 11 в верхнее положение В, находясь в котором они взаимодейству- I ют с консолями 9 рычагов 4, поворачи- |вают их и связанные с ними одноплечие рычаги 4 и 5, вызывая перемещение копиров 2. В остальном процесс аналогичен описанному ранее.
На фиг.1-4 изображены ограничители поворота рычагов, вьтолненные как одно целое с последними. Такая конструкция обеспечивает более равномерное нагружение рычагов сжимающи- ми силами. На фиг.5 изображен вариант, когда ограничители 16 поворота вьшолнены отдельно и связаны с неподвижной рамой 1. В этом случае на рычаги действуют изгибающие и сжимающие силы, что приводит к увеличению их веса.
На фиг.1-4 переключающие упоры 10 и 11 изображены расположенными с разных концов конвейера и взаимодействующими каждый со своей консолью 9 рычага 4. В основном это сделано для больщей ясности фигур. Размещение упоров в одном конце конвейера и их взаимодействие с одной консолью 9 рычага упрощает управлением переключающими упорами.
На фиг.7-8 изображен вариант конструкции подвижной рамы 12, в кото ром ролики 13 выступают над ее по верхностью.Это позволяет перемещать груз за один ход подвижной рамы на расстояние двух щагов. Такая конструк
I
дня применима для перемещения штучных
грузов с ровным основанием, длина которых не менее двух расстоян1 й между роликами 13. Кроме того, такое конструктивное решение поз воляет прозводить местное разрежение или груп- Пировку грузов по длине конвейера, что в ряде случаев желательно по технологическим соображениям.
Формула изобретения
Шаговый конвейер, содержащий не- подвиа ную раму, установленную с возможностью возвратно-поступательного перемещения по неподвижной раме на роликах подвижную раму, расположенные на неподвижной раме с возможностью перемещения в вертикальной плоскости копиры и привод перемещения подвижной рамы, отличающийся тем , что, с целью обеспечения реверсивной работы конвейера, неподвижная рама вьшолнена с вертикальными направляющими для копиров, а конвейер снабжен установленными на подвижной раме двумя регулируемыми упорами и расположенной с возможностью возвратно-поступательного перемещения в направлении движения подвижной рамы штангой, причем каждый копир установлен на неподвижной раме посредством двух пар рычагов, при этом одни концы рьшагов в каждой паре щарнирно соединены между собой и со щтангой, а другие шар- нирно соединены соответственно с копиром и неподвижной рамой, образуя со щтангой щарнирные параллелограммы, причем рычаги имеют ограничители их поворота, а копир выполнен с окном, при этом один из шарнирно соединенных с копиром рычагов выполнен с консолью, размещенной в окне копира, а регулируемые упоры установлены с возможностью взаимодействия со щтангой и размещенной в окне копира консолью.
Фиг.д
| название | год | авторы | номер документа |
|---|---|---|---|
| Шаговый конвейер | 1988 |
|
SU1565790A1 |
| Шаговый конвейер | 1980 |
|
SU939350A1 |
| Вертикальный накопитель для штучных грузов | 1985 |
|
SU1303504A1 |
| Шаговый конвейер | 1988 |
|
SU1525089A1 |
| Вертикальный накопитель | 1989 |
|
SU1698148A1 |
| Шаговый конвейер | 1990 |
|
SU1794815A1 |
| Шагающий конвейер-накопитель | 1985 |
|
SU1270075A1 |
| Устройство для натяжения ленты конвейера | 1987 |
|
SU1512880A1 |
| Привод шагающего конвейера | 1979 |
|
SU876530A1 |
| Шаговый конвейер | 1980 |
|
SU945013A1 |
Изобретение относится к промышленному транспорту, в частности к конвейерам с циклически движущимися грузоносителями, и м.б. использовано для механизации перемещения штучных грузов горизонтально и под углом к горизонту, не превышающим угол трения транспортируемых изделий о раму конвейера. Цель - обеспечение реверсивной работы конвейера. На неподвижной раме () 1 BO3BpatHo-nocTy- пателъно на роликах 13 перемещается подвижная Р 12. Р 1 вьшолнена с вертикальными направляющими - окнами 3, в которых расположены копиры К 2 С возможностью возвратно-поступательного перемещения в направления движения Р 12 расположена штанга (Ш) 8. Каждый К 2 установлен на Р 1 пое- рсЕдством двух пар рычагов 4 и 5. Одни концы рычагов 4 и 5 в каждой паре шарнирно соединены между собой и со Ш 8, а другие - соответственно с К 2 и Р 1, образуя со Ш 8 щарнир- ные параллелограммы. Рычаг 4 выполнен с консолью 9, размещенной в окне К 2. На Р 12 установлены два регулируемых упора 10 и 11, взаимодействующие со Ш 8 и консолью 9. Р 12 приводится зв движение приводом 14. При включении привода 14 ролики 13 набегают на К 2 и поднимают Р 12, кото- рая принимает на себя груз с Р 1 и перемещает его вправо до тех пор, пока ролики 13, скатываясь с К 2, опускают Р 12. В этот момент упор 10 сдвигает Ш 8 вправо до тех пор, пока рычаги 4 и 5 не сложатся под действием собственного веса и веса К 2, а К 2 опускаются ниже Р 1. 8 ил. и J4ю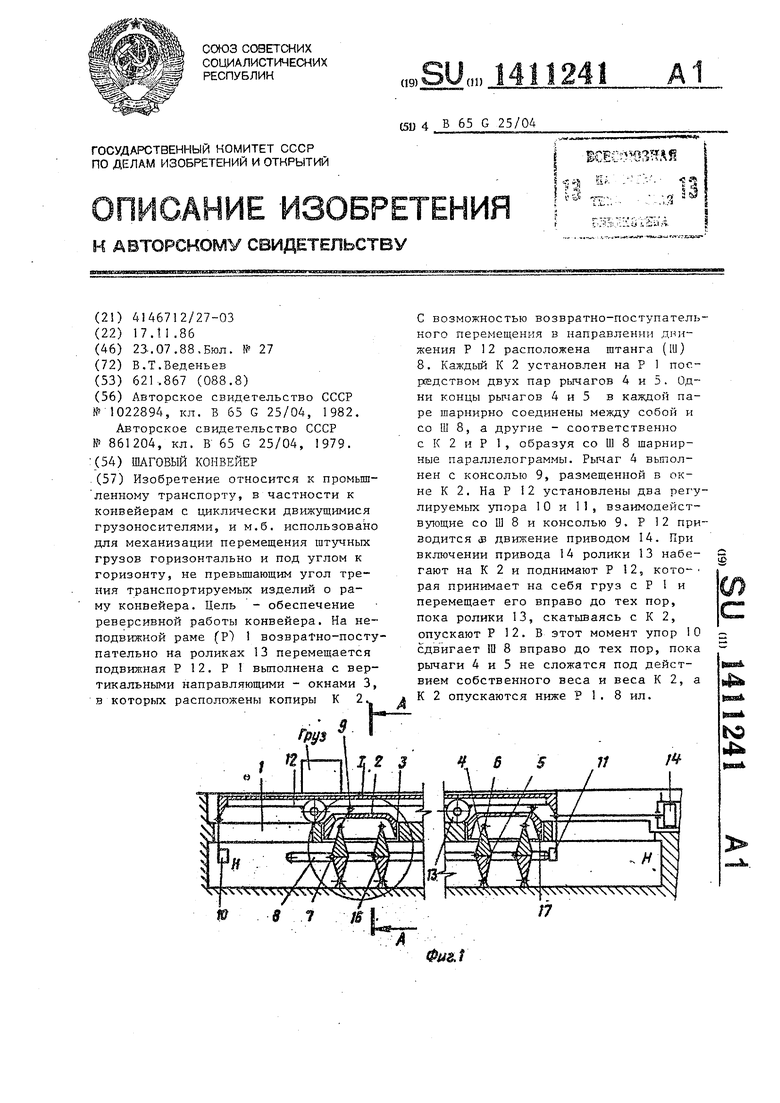
Фт.
/2 /I
| Шагающий конвейер | 1982 |
|
SU1022894A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Видоизменение прибора для получения стереоскопических впечатлений от двух изображений различного масштаба | 1919 |
|
SU54A1 |
