.
Изобретение относится к лесной и деревообрабатывающей промышленности и может быть использовано для сброса бревен, брусьев, досок и других грузов с продольного конвейера в накопитель при их сортировке.
Известен сбрасыватель грузов, включающий корпус, толкатель горизонтального действия, шарнирно укрепленный на ползуне, установленном на направляющих и приводе 1
Однако этот сбрасыватель плохо прИ способлен для сбрасывания длинномерных грузов, кроме того, привод толкателя в виде винта с гайкой ненадежен в работе, так как при больших скоростях вращения передача винт-гайка быстро йзнгиаивается.
Наиболее близким по технической сущности и достигаемому эффекту к предлагаемому является сбрасыватель, включающий корпус, толкатель горизонтального действия, связанный хвостовиком ползуна с рабочей ветвью приводного гибкого тягового органа, огибающего ведущий и ведомый элементы, установленные на осях 1.2 1.
Недостатком этого устройства является то, что оно имеет постоянную скорость движения -гибкого тягового
органа, В конечных точках хода толкателя при его трогании и остановках а гибком тяговом органе возникают большие динамические нагрузки,что приводит к быстрому его износу и снижению срока службы сбрасывателя.
Кроме этого, при возвратно-поступательном движении ведущая и ведомая
0 звездочка гибкого тягового органа совершает несколько оборотов, поэтому для ограничения хода толкателя используются лыжи, установленные на ползуне, и два конечных выключателя,
15 установленные по концам рабочего хо|Да толкателя. На большой скорости лыжа ползуна воздействует на воспринима101ций элемент концевого выключателя. Возникающие ударные нагрузки приводят к нарушению настройки концевых выключате 1ей или поломке восприн имгиоце го элеме нт а.
цель изобретения - снижение динамических нагрузок на гибкий тяговый орган и концевые выключатели при трогании и остановке толкателя.
Поставленная цель достигается тем, что ведущий и ведомый элементы .эксцентрично установлены на осях и имеЮТ диаметры начальной окружности, определяемые по формуле
, ЕРб,
где диаметр начальной окружности;Е - ход толкателя.
При этом рабочая ветвь типового органа имеет соединительное звено с отверстием, в котором с возможностью вертикального перемещения установлен хвостовик ползуна.
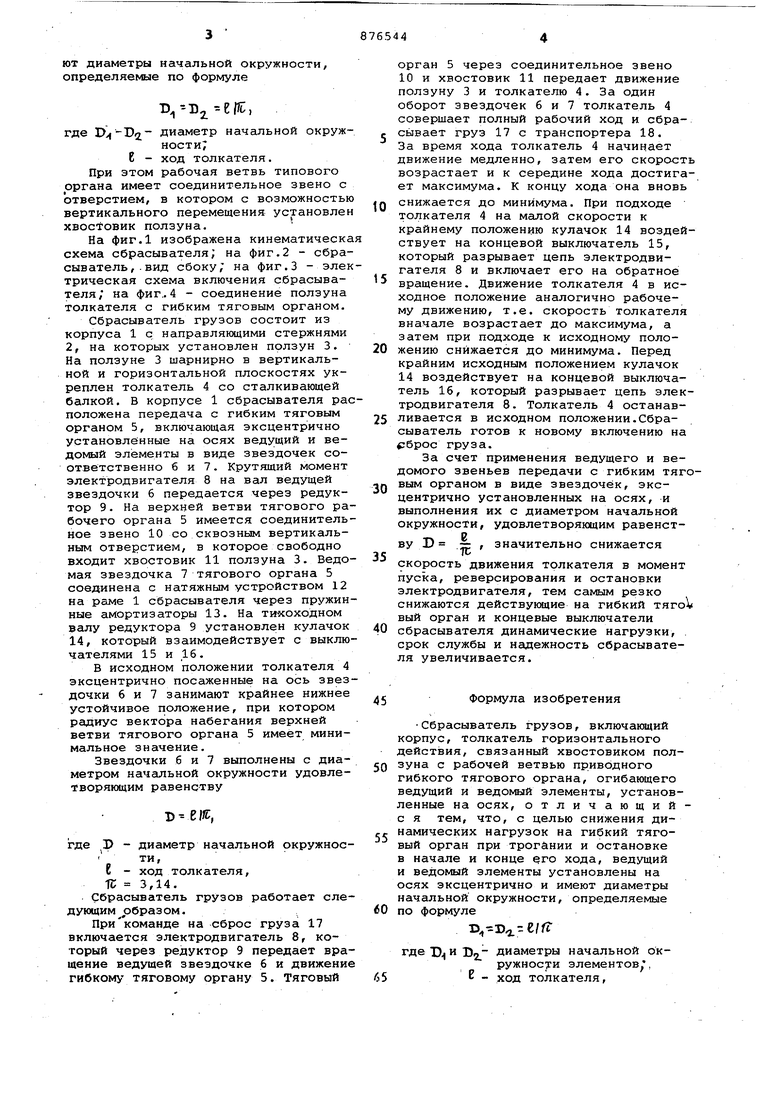
На фиг.1 изображена кинематическа схема сбрасывателя; на фиг.2 - сбрасыватель, . вид сбоку; на фиг.З - электрическая схема включения сбрасывателя; на фиг.. 4 - соединение ползуна толкателя с гибким тяговым органом.
Сбрасыватель грузов состоит из корпуса 1 с направляющими стержнями 2, на которых установлен ползун 3. На ползуне 3 шарнирно в вертикальной и горизонтальной плоскостях укреплен толкатель 4 со сталкивающей балкой. В корпусе 1 сбрасывателя расположена передача с гибким тяговым органом 5, включающая эксцентрично установленные на осях ведущий и ведомый элементы в виде звездочек соответственно 6 и 7. Крутящий момент электродвигателя 8 на вал ведущей звездочки 6 передается через редуктор 9. На верхней ветви тягового рабочего органа 5 имеется соединительное звено 10 со сквозным вертикальным отверстием, в которое свободно входит хвостовик 11 ползуна 3. Ведомая звездочка 7 тягового органа 5 соединена с натяжным устройством 12 на раме 1 сбрасывателя через пружинные амортизаторы 13. На тихоходном валу редуктора 9 установлен кулачок 14, который взаимодействует с выключателями 15 и 16.
В исходном положении толкателя 4 эксцентрично посаженные на ось звездочки 6 и 7 занимают крайнее нижнее устойчивое положение, при котором радиус вектора набегания верхней ветви тягового органа 5 имеет минимальное значение.
Звездочки 6 и 7 выполнены с диаметром начальной окружности удовлетворяющим равенству
D-B№,
где ID - диаметр начальной окружности,
ь - ход толкателя, 1C 3,14.
Сбрасыватель грузов работает следующим образом .
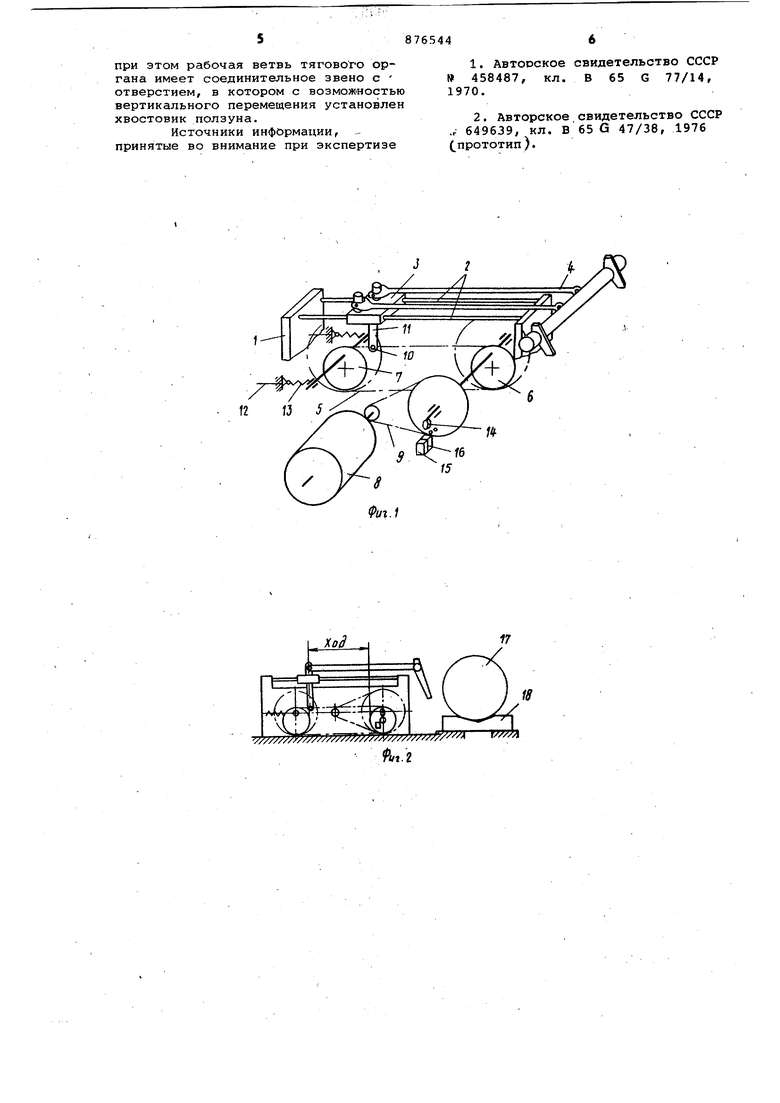
При команде на сброс груза 17 включается электродвигатель 8, который через редуктор 9 передает вращение ведущей звездочке б и движение гибкому тяговому органу 5. Тяговый
орган 5 через соединительное звено 10 и хвостовик 11 передает движение ползуну 3 и толкателю 4. За один оборот звездочек б и 7 толкатель 4 совершает полный рабочий ход и сбрасывает груз 17 с транспортера 18. За время хода толкатель 4 начинает движение медленно, затем его скорост возрастает и к середине хода достигает максимума. К концу хода она вновь снижается до минимума. При подходе толкателя 4 на малой скорости к крайнему положению кулачок 14 воздействует на концевой выключатель 15, который разрывает цепь электродвигателя 8 и включает его на обратное вращение. Движение толкателя 4 в исходное положение аналогично рабочему движению, т.е. скорость толкателя вначале возрастает до максимума, а затем при подходе к исходному положению снижается до минимума. Перед крайним исходным положением кулачок 14 воздействует на концевой выключатель 16, который разрывает цепь электродвигателя 8. Толкатель 4 останавливается в исходном положении.Сбрасыватель готов к новому включению на «:брос груза.
За счет применения ведущего и ведомого звеньев передачи с гибким тягвым органом в виде звездочек, эксцентрично установленных на осях, и выполнения их с диаметром начальной окружности, удовлетворяющим равенстт е
ву JLJ : , значительно снижается (Ь
скорость движения толкателя в момент пуска, реверсирования и остановки электродвигателя, тем самым резко снижаются действующие на гибкий тяго вый орган и концевые выключатели сбрасывателя динамические нагрузки, срок службы и надежность сбрасывателя увеличивается.
Формула изобретения
Сбрасыватель грузов, включакяций корпус, толкатель горизонтального действия, связанный хвостовиком ползуна с рабочей ветвью приводного гибкого тягового органа, огибающего ведущий и ведомый элементы, установленные на осях, отличающий с я тем, что, с целью снижения динамических нагрузок на гибкий тяговый орган при трогании и остановке в начале и конце го хода, ведущий и ведомый элементы установлены на осях эксцентрично и имеют диаметры начальной окружности, определяемые О по формуле
-ilfi
0,-0
где D-- диаметры начальной окружности элементов, f)5 - ход толкателя.
при этом рабочая ветвь тягового органа имеет соединительное звено с отверстием, в котором с возможностью вертикального перемещения установлен хвостовик ползуна.
Источники информации, принятые во внимание при экспертизе
1. Автооское свидетельство СССР № 458487, кл. В 65 G 77/14, 1970.
2. Авторское свидетельство СССР .г 649639, кл. В 65 G 47/38, 1976 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Сбрасыватель грузов | 1976 |
|
SU781154A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ СОРТИРОВКОЙ КРУГЛОГО ЛЕСА | 2023 |
|
RU2795741C1 |
| Сбрасыватель грузов | 1976 |
|
SU649639A1 |
| Устройство для перегрузки изделий | 1986 |
|
SU1395571A1 |
| Загрузочное устройство | 1981 |
|
SU1022893A1 |
| Устройство для контроля плотности цементогрунтовой смеси при строительстве ленточных фундаментов | 1982 |
|
SU1077978A1 |
| ПРИВОД СКВАЖИННОГО ШТАНГОВОГО НАСОСА | 2004 |
|
RU2274767C1 |
| Привод шагового конвейера | 1987 |
|
SU1437312A1 |
| Вертикально-замкнутый тележечный конвейер | 1981 |
|
SU982992A1 |
| Устройство для загрузки изделий на подвесной конвейер | 1983 |
|
SU1159849A1 |

urlt
