19 В 9 22
. 5/7 Ct
42
lih 5 fo
26 5 21 77 4 /J/ 12
1-4; / /L
/J75/4 /5 ZO
со со
ел СП
(риг. 5
П Ц7Ц6 7 Bl
Изобретение относится к промышленному транспорту, а точнее к устройствам для внутрицеховых неревозок, например, в автоматизированных стеллажных складах для нерегрузки штучных грузов от автоматиче- СКОРО крана - штабелера на оборудование экспедиции и обратно.
Цель изобретения - расширение функциональных возможностей.
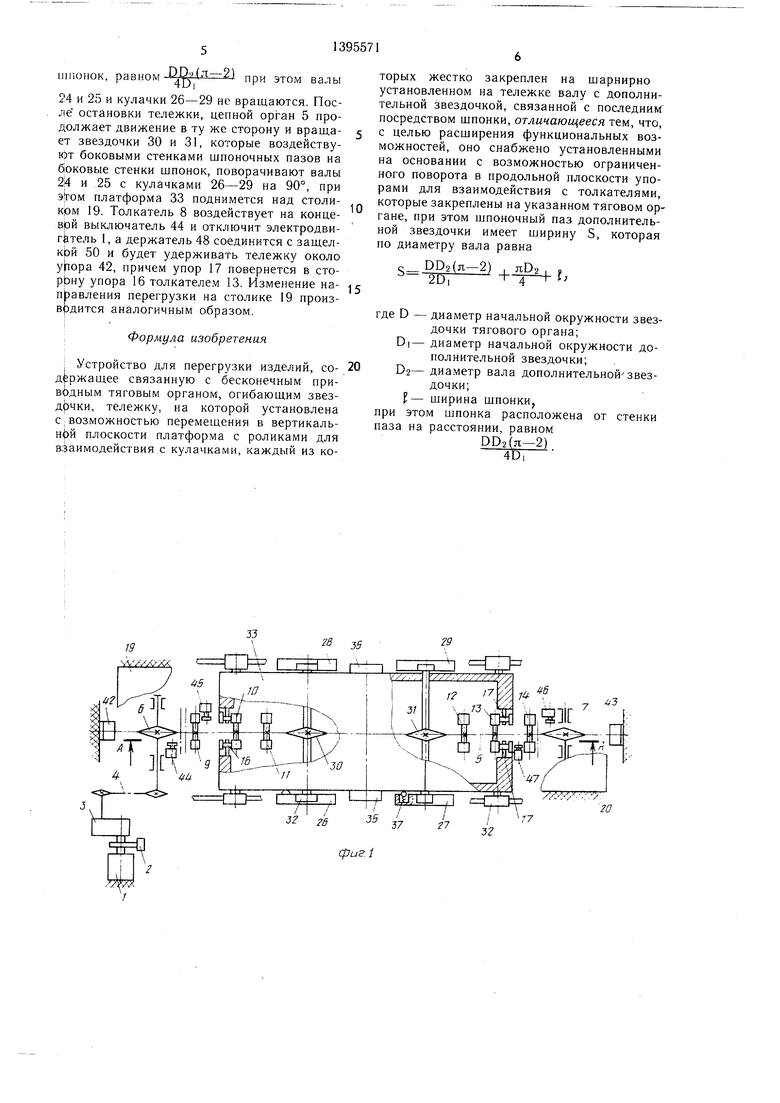
На фиг. 1 изображено устройство, вид сверху; на фиг. 2 - то же, вид сбоку, с под- нятой платформой; на фиг. 3 - разрез А-А на фиг. 1; на фиг. 4 - устройство, в положении на,, позиции перегрузки с опущенной платформой.
Устройство для перегрузки изделий со- держит реверсивный привод, состояш.ий из электродвигателя 1, тормоза 2, редуктора 3, цепной передачи 4 и бесконечного тягового цепного органа 5, огибающего звездочки 6 и 7 с диаметром начальной окружности D.
На цепном органе 5 закреплены две груп- пы толкателей 8-1 i и 12-15 д,ля взаимодействия соответственно с упорами 16 и 17, причем толкатели в каждой группе закреплены с одинаковым шагом, равным i-.
При этом, толкатели 10 и 13 приводят в реверсивное движение перегрузочную тележку 18 между столиками 19 и 20-и позволяют изменять направление перегрузки на любом
столике.
Толкатели 9 и 12 приводят в реверсивное движение тележку 18, после изменения направления перегрузки на столике 20, а толкатели 11 и 14 - после изменения направления перегрузки на столике 19. Толкатели 8 и 15 обеспечивают п/1авный поворот упо- ров 16 и 17, шарнирно закрепленных на раме 21 тележки 18 до ограничителей 22 и 23, которые удерживают их в вертикальном положении.
На раме 21 смонтированы валы 24 и
25с диаметрами Dg, на которых неподвиж- но закреплены кулачки 26-29 и с возможностью поворота звездочки 30 и 31 с диаметром начальной окружности DI, взаимосвязанными с цепным органом 5. На кулачках 26-29 посредством роликов 32 установлена подъемная грузонесущая платформа 33, с возможностью вертикального перемещения относительно рамы 21, для чего на раме 21 закреплен ролик 34, а на платформе 33 вертикально расположенная вилка 35, охватывающая ролик 34, при этом кулачки 26-29 имеют эллиптический профиль, что позволяет при повороте кулачков на 90° последовательно поднимать
и опускать платформу 33 в крайние положения. Для-повышения устойчивости платформы 33 в крайних положениях, кулачки
26и 27 спабжены фиксаторами 36 и 37, в виде подпружиненных шариков, устанавливаемых в отверстия на раме 21 при последовательном повороте кулачков на 90°. В звездочках 30 и 31 выполнены шпоночные пазы 38 и 39, каждый из которых вместе валами 24 и 25 образуют в поперечном сечении кольцевой сектор, а валы 24 и 25 снабжены шпонками 40 и 41 с шириной . При этом, ширина щпоночных пазов 38 и 39 по диаметру вала равна
РР2(я-2) , лОг , f
-ж - +
а шпонки 40 и 41 размещены между боковыми стенками шпоночных пазов 38 и 39 и расположены с одной стороны на расстоянии
,яО D, Da
М 2 D, ,
DDgfn-2)
а с другой на расстоянии
РР2(я-2) лР2 40, 4
Такая ширина шпоночных пазов 38 и 39 и размещение шпонок -lO и 41 внутри шпоночных пазов обеспечивают начало подъема - опускания платформы 33 после остановки тележки 18 на позициях перегрузки и сохраняет неизменным положение платформы в процессе транспортирования в реверсивном режиме.
На позициях перегрузки, выполненных в виде стационарных столиков 19 и 20, смонтированы упоры 42 и 43, ограничивающие движение тележки 18 и концевые выключатели 44-47, отключающие электродвигатель 1, после окончания перегрузочной операции, при этом толкатель 8 последовательно взаимодействует с концевыми выключателями 44 и 45, а толкатель 15 - с концевыми выключателя.ми 46 и 47, обеспечивая подъем или опускание платформы 33 в крайние положения на каждой позиции перегрузки.
С целью исключения самопроизвольного откатывания тележки 18 при реверсивном движении цепного органа 5 на позиции перегрузки, на раме 21 закреплены держатели 48 и 49 с треугольными призмами на свободных концах, с которыми взаимодействуют защелки 50 и 51, в виде шар- нирно закрепленных на неподвижном основании стержней с треугольными призмами на свободных концах, подпружиненные в сторону держателей 48 и 49, надежно удерживающие тележку 18 до начала транспортирования под действием толкателей, закрепленных на цепном органе 5.
Трансробот работает следующим образом.
Например, груз 52 необходимо перегрузить на столик 19 (фиг. 3). Включением
электродвигателя 1 приводят в движение цепной орган, 5 в сторону упора 42, при этом толкатель 10, воздействуя на упор 16, приводит тележку 18 в движение.
На прямолинейном участке цепного ор- гана 5, тележка 18 перемещается со скоростью цепного органа, а кулачки 26-29 и звездочки 30 и 31, смонтированные посредством валов 24 и 25 на раме 21, не вращаются. При огибании толкателем 10 звездоч- ки 6 (фиг. 4) происходит замедление движения тележки 18, а при крайнем левом положении толкателя 10 тележка 18 остановится. При замедлении движения тележки
18начнется вращение звездочек 30 и 31 относительно валов 24 и 25 за счет зазора между боковыми стенками шпоночных пазов 38 и
39 и боковыми стенками щпонок 40 и 41, равном
РР2(
при этом валы 24 и 25 и кулачки 26-29 не вращаются. После остановки тележки 18, цепной орган 5 продолжает движение в ту же сторону, и вращает звездочки 30 и 31, которые воздействуют боковыми стенками щпоночных пазов 38 и 39 на боковые стенки щпонок 40 и 41 и поворачивают валы 24 и 25 с кулачками 26-29 на 90°, при этом платформа 33 опустится ниже столика
19и перегрузит груз 52 на столик. Толка
тель о воздействует на концевой выключатель
44 и отключит электродвигатель 1, а держатель 48 соединится с защелкой 50 и будет удерживать тележку около упора 42, причем упор 17 повернется в сторону упора 16 толкателем 14.,
При реверсе электродвигателя 1, цепной орган 5 вращается в сторону упора 43, при этом звездочки 30 и 31 поворачиваются от- носительно валов 24 и 25 на величину зазора
РР2(я-2) лРа
4D,- 4
после чего между боковой стенкой щпоночных пазов и боковой стенкой щпонок сохраРР2(л-2)
нится зазор
4Р|
-, а толкатель 13 коснется упора 17 и начнет перемещать тележку 18 в сторону упора 43. При этом защелка 50 выйдет из зацепления с держателем 48, а упор 17 при движении толкателя 14 в сторону упора 43 повернется под собст- венным весом в вертикальное положение и коснется ограничителя 23.
При огибании толкателем 13 звездочки 7 происходит замедление движения тележки 18, а при крайнем правом положении толкателя 13 тележка 18 остановится. При за- медлении движения тележки начнется вращение звездочек 30 и 31 относительно валов 24 и 25 за счет оставшегося зазора между боковыми стенка.ми пазов 38 и 39 и боковыми
5 Q
5
0
5
0
5
0
5
0
стенками щпонок 40 и 41, равномЦ
при этом валы 24 и 25 и кулачки 26-29 не вращаются. После остановки тележки 18, цепной орган 5 продолжает движение в сторону упора 43 и вращает звездочки 30 и 31, которые воздействуют боковыми стенками щпоночных пазов 38 и 39 на боковые стенки шпонок 40 и 41 и поворачивают валы 24 и 25 с кулачками 26-29 на 90°, при этом платформа 33 поднимается выще столика 20 и забирает новый груз. Толкатель 15 воздействует на концевой выключатель 46 и отключит электродвигатель 1, а держатель 49 соединится с защелкой 51 и будет удерживать тележку около упора 43, причем упор 16 повернется в сторону упора 17 толкателем 9.
Для изменения направления перегрузки, например, на столике 20, после взятия груза, включают электродвигатель 1 и приводят в движение цепной орган 5 в сторону упора 43. При этом тележка 18 остается неподвижной, а звездочки 30 и 31 поворачивают валы 24 и 25 с кулачками 26-29 еще на 90° и опускают платформу 33 в крайнее нижнее положение, оставляя груз на столике 20. При опускании платформы 33 толкатели 8-15 перемещаются на один щаг в направлении движения цепного органа 5, при этом толкатель 8 удерживает упор 16 повернутым в сторону упора 17, толкатель 9 выходит из взаимодействия с упором 16, а толкатель 15, воздействуя на концевой выключатель 47, отключит электродвигатель 1. В этом положении тележка 18 может транспорт 1роваться в сторону столика 19. Включением электродвигателя 1 приводят в движение цепной орган 5 в сторону упора 42, при этом звездочки 30 и 31 поворачиваются относительно валов 24 и 25 на величину зазора
РР2(л-2) яР2
4Р|4
после чего между боковой стенкой щпоночных пазов и боковой стенкой щпонок сохраняется зазор ., а толкатель 9 коснется упора 16 и начнет перемещать тележку 18 в сторону упора 42. При этом, защелка 51 выйдет из зацепления с держателем 49, а упор 16 при движении толкателя 8 в сторону упора 42 повернется под собственным весом в вертикальное положение и коснется ограничителя 22.
При огибании толкателем 9 звездочки 6 происходит замедление движения тележки 18,, а при крайнем левом положении толкателя 9 тележка 18 остановится. При замедлении движения тележки 18 начнется вращение звездочек 30 и 31 относительно валов 24 и 25 за счет зазора между боковыми стенками щпоночных пазов и боковыми стенками
uiiiOHOK, равном при этом валы
24 и 25 и кулачки 26-29 не вращаются. После остановки тележки, цепной орган 5 продолжает движение в ту же сторону и вращает звездочки 30 и 31, которые воздействуют боковыми стенками шпоночных пазов на боковые стенки шпонок, поворачивают валы 2|4 и 25 с кулачками 26-29 на 90°, при э|гом платформа 33 поднимется над столи- крм 19. Толкатель 8 воздействует на конце- врй выключатель 44 и отключит электродви- гЬтель 1, а держатель 48 соединится с защел- крй 50 и будет удерживать тележку около уИора 42, причем упор 17 повернется в сторону упора 16 толкателем 13. Изменение на- пЬавления перегрузки на столике 19 производится аналогичным образом.
:Формула изобретения
I Устройство для перегрузки изделий, со- д ржащее связанную с бесконечным приводным тяговым органом, огибаюш.им звез- дрчки, тележку, на которой установлена С; возможностью перемещения в вертикаль- н|)й плоскости платформа с роликами для взаимодействия с кулачками, каждый из ко
0
0
торых жестко закреплен на щарнирно установленном на тележке валу с дополнительной звездочкой, связанной с последним посредством щпонки, отличающееся тем, что, с целью расширения функциональных возможностей, оно снабжено установленными на основании с возможностью ограниченного поворота в продольной плоскости упорами для взаимодействия с толкателями, которые закреплены на указанном тяговом органе, при этом 1ипоночный паз дополнительной звездочки имеет ширину S, которая по диаметру вала равна
с РР2(л-2) I яРг , . - 20, +1
где D - диаметр начальной окружности звездочки тягового органа; DI- диаметр начальной окружности дополнительной звездочки; D2- диаметр вала дополнительной звездочки;
Р- ширина шпонки,
при этом шпонка расположена от стенки паза на расстоянии, равном РР2(л-2) 4D,

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для перегрузки изделий | 1988 |
|
SU1654184A1 |
| Устройство для перегрузки изделий | 1988 |
|
SU1579877A1 |
| Устройство для перегрузки грузов на приемные конвейеры | 1988 |
|
SU1655874A1 |
| Устройство для перегрузки изделий | 1981 |
|
SU1022919A2 |
| Устройство для перегрузки изделий | 1983 |
|
SU1150198A1 |
| Устройство для перегрузки изделий | 1980 |
|
SU948817A1 |
| Механизм передачи крутящего момента | 1980 |
|
SU998194A1 |
| Устройство для перегрузки изделий | 1983 |
|
SU1181968A1 |
| Загрузочное устройство | 1982 |
|
SU1090640A1 |
| Загрузочное устройство | 1984 |
|
SU1222604A1 |

Изобретение относится к области промышленного транспорта,,а именно к устройствам для внутрицеховых перевозок. Цель изобретения - расширение функциональных возможностей. Устройство для перегрузки изделий содержит тележку с подъемной грузонесуш,ей платформой 33 и приводной бесконечный тяговый орган 5, смонтированный на звездочках 6, 7 с диаметром начальной окружности Д. На тяговом органе закреплены две группы толкателей 8, 9, 10, 11 и 12, 13, 14, 15, последовательно взаимодействующих с упорами 16, 17, шарнирно закрепленными на раме 21 тележки и удерживаемыми в вертикальном положении ограничителями 22, 23. Механизм подъема платформы выполнен в виде кулачков 26 и 27. Механизм подъема платформы состоит из закрепленных на последней роликов для взаимодействия с кулачками 26 и 27, которые жестко закреплены на валах 24 и 25, несущих установленные с возможностью ограниченного поворота звездочки 30 и 31 для взаимодействия с тяговым органом 5. Устройство, несущее установленный в поднятое положение груз, подъезжает к прием-, ному столу 19, при этом за счет равенства скоростей тележки и тягового органа звездочки 30 и 3 не вращаются, а при подходе тележки к столу сначала замедляется движение тележки, при этом звездочки 30 и 31 свободно поворачиваются на валах 24 и 25. После остановки тележки при взаимодействии со шпонками поворачивают валы 24 и 25 с кулачками, при этом платформа опускается, перегружая груз на стол. 4 ил. S (Л
/ - 2гАг 44 548
3 4
Ю
h 9
«f
5/
26 24 36 4 272:f 57
ijtf3.2
47 45
4J
sr
/ /5 фиг Л
7 S
| Способ устройства противопожарного защитного слоя кровельных покрытий | 2016 |
|
RU2645195C1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
