4
СО
00
го
ipu.2
Изобретение относится к промышленному транспорту, а именно к приводу шагового конвейера.
Целью изобретения является повышение надежности работы конвейера путем исключения изгибающих моментов, действующих на ведомый орган конвейера, и снижение динамических нагрузок на толкатели путем увеличения времени разгона при заданном крутящем моменте двигателя привода.
На фиг. 1 .изображен шаговый конвейер, общий вид; на фиг. 2 - привод, общий вид; на фиг. 3 - кинематическая схема привода; на фиг. 4 - график скорости цепей {ведомого органа} конвейера.
Шаговый конвейер оснащен ковшами 1, шарнирно подвешенными на цевках 2 ведомого органа конвейера, выполненного в виде тяговых цепей 3. На раме 4 установлены ведущие 5 и ведомые 6 звез,;10чки, огибаемые тяговым органом в виде двух пар бесконечно замкнутых контуров 7, кинематичес- ки связанных между собой. Контуры 7 попарно соединены щтангами 8 и 9 и выполнены конгруэнтными.
Толкатели 0 шарнирно закреплены на штангах 8 и 9, расположенных в одной горизонтальной плоскости и закрепленных на соседних парах контуров 7.
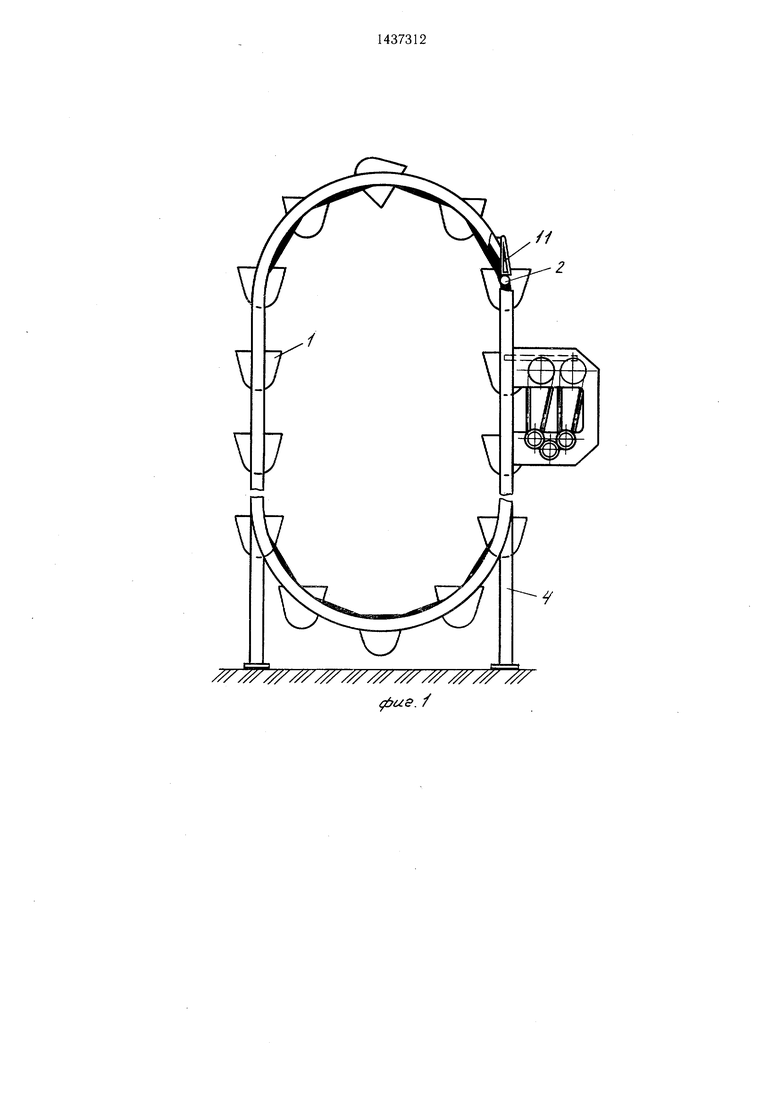
Привод снабжен анкерными собачками 11, шарнирно закрепленными на раме 4. Ведущие ветви контуров 7 расположены параллельно тяговым цепям шагового конвейера, причем диаметры ведомых звездочек 6 выполнены в 2-2,5 раза больше диаметров ведущих звездочек 5. Кинематическая связь тяговых органов осуществлена одинаковыми зубчатыми колес.ами 12, 13 и 14, из которых зубчатые колеса 13 установлены на общем приводном валу 15.
Устройство работает следующим образом.
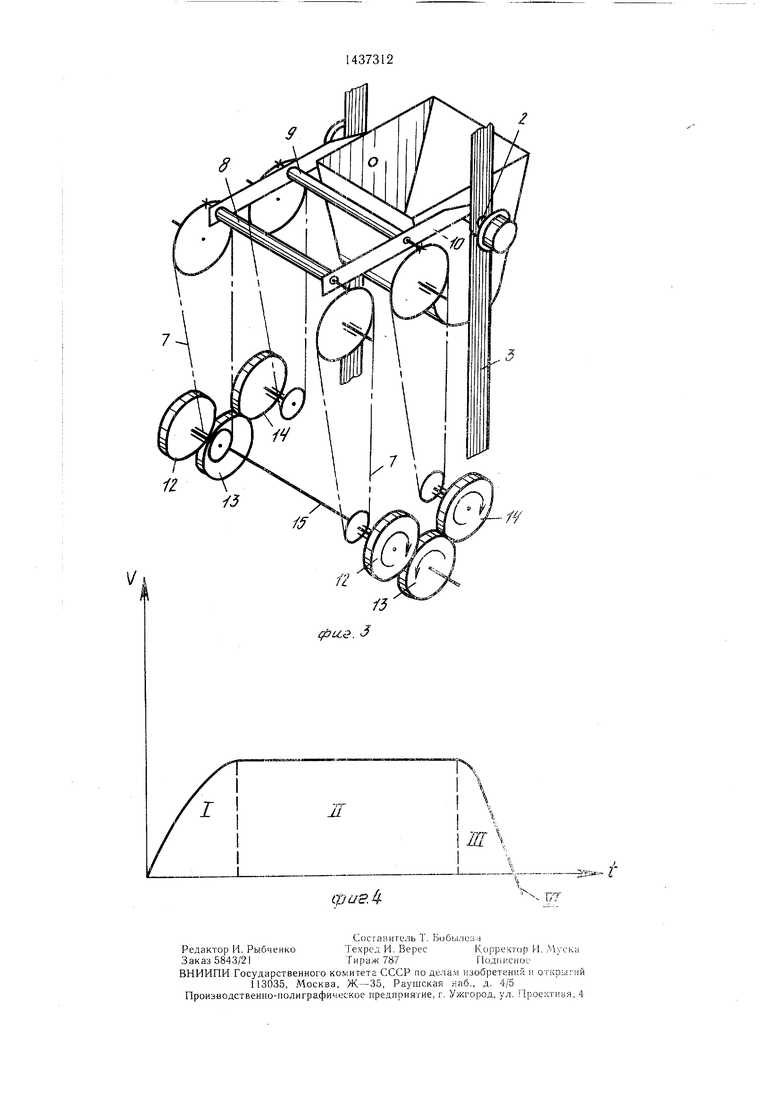
При вращении приводного вала 15 сидящее на нем зубчатое колесо 13 через зубчатые колеса 12 и 14 сообщает движение ведущим звездочкам 5. Бесконечно замкну- тые контуры 7 при помон и щтанг 8 и 9 сообщают толкателям 10 синхронное движение по заданной трактории, т. е. в начале движения толкателям 10 перемещаются до дуге окружности, равной делительному диаметру ведомой звездочки 6. При этом осуществляется плавный разгон по синусоидальному закону (кривая I, фиг. 4). Затем толкатель 10 движется с постоянной скоростью в направлении, совпадающем с направлением движения тяговой цепи 3 элеватора (прямая И, фиг. 4). В конце хода осуществляется замедление по синусоидальному закону благодаря движению толкателя 10 по дуге
5
5
0
0 О
0
5
5
окружности, равной де тительному диаметру ведущей звездочки 5(кривая III, фиг. 4). Вертикальное перемещение толкателя 10 на 20-25 мы превышает расстояния между цевками 2 (щаг тяговой цепи конвейера), что обеспечивает гарантированное срабатывание анкерной собачки 11.
Продолжая двигаться по дуге окружности (кривая 1У, фиг. 4), толкатель 10 выходит из взаимодействия с цевкой 2, после чего тяговая цепь 3 конвейера смещается назад до взаимодействия цевок 2 с анкерными собачками 11, т. е. скорость тяговой цепи 3 меняет направление (кривая 1У, фиг. 4).
Таким образом, в течение всего перемещения тяговой цепи 3 шагового конвейера тяговое усилие приложено к ней в направлении движения, вдоль ее оси, что исключает возникновение изгибающего момента. Выполнение диаметров ведомых звездочек 6 больше диаметров ведущих звездочек 5 позволяет увеличить время разгона и тем самым снизить динамические нагрузки при заданном крутящем моменте двигателя.
Формула изобретения
1.Привод шагового конвейера, включающий раму, ведущие и ведомые звездочки, огибающий их тяговый орган, ведуш,ая ветвь которого расположена параллельно ведомому органу конвейера, и толкатели, установленные на тяговом органе с возможностью взаимодействия с ведомь м органом конвейера, отличающийся тем, что, с целью повышения 1-ш.(ностк работы .со вейера путем исключения И31 йбзюи1,/;л моментов, действующих ка ЕСДОГ.ЫЙ орган коивейера, тяговый орган выполнен з виде двух пар бесконечно замкнутых конт /ров, кинематически связанных друт с другом м соединенных в каждой паре между собой щтангами, причем бесконечно замкнутые контуры выполнены конгруэнтными, а каждый толкатель закреплен на 1.атангах, расположенных в одной горизонтальной плоскости и закрепленных на соседних парах бесконечно замкнутых контуров, причем рама снабжена анкерными собачками, шарнирно закрепленными на ней с возможностью взаимодействия с ведомым органом конвейера.
2.Привод по п. 1, отличающийся тем, что, с целью снижения динамических нагрузок на толкатели путем увеличения времени разгона при заданном крутящем моменте двигателя привода, диаметры ведомых звездочек выполнены больше диаметров ведущих зве.здочек.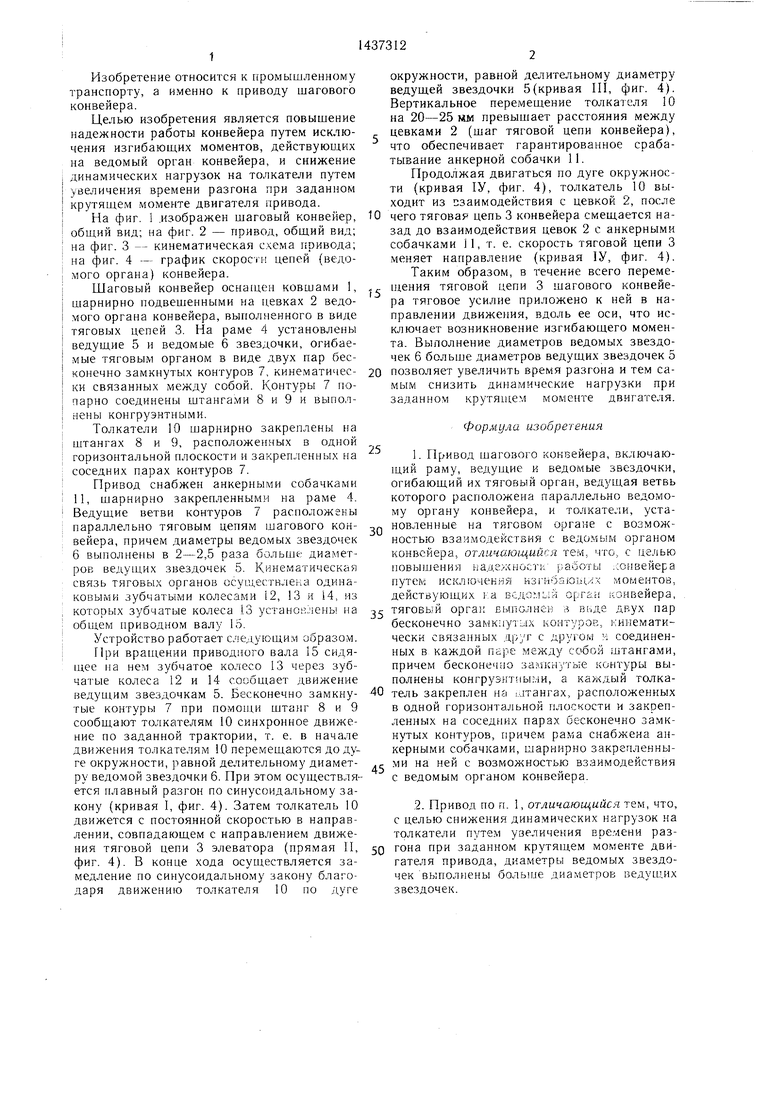
| название | год | авторы | номер документа |
|---|---|---|---|
| Привод шаговых перемещений | 1990 |
|
SU1778048A1 |
| ЦЕПНОЙ КОНВЕЙЕР | 1990 |
|
RU2041147C1 |
| Пластинчатый конвейер | 1981 |
|
SU1077827A1 |
| Транспортирующее устройство | 1981 |
|
SU1006346A1 |
| УСТРОЙСТВО ДЛЯ РАЗБОРА ПАКЕТА УЛОЖЕННЫХ С ПРОКЛАДКАМИ ДОСОК | 1991 |
|
RU2031065C1 |
| Агрегат для термообработки стеклоизделий | 1979 |
|
SU872471A1 |
| Вертикально-замкнутый тележечный конвейер | 1974 |
|
SU543569A1 |
| Вертикально-замкнутый тележечный конвейер | 1982 |
|
SU1077828A1 |
| ВЕЛОСИПЕД И РЫЧАЖНО-ХРАПОВОЙ МЕХАНИЗМ | 1999 |
|
RU2155141C1 |
| Устройство для транспортирования изделий | 1979 |
|
SU882887A1 |
Изобретение относится к пром. транспорту и позволяет повысить надежность работы конвейера путем исключения изгибающих моментов, действующих на ведомый орган конвейера. На раме с анкерными собачками установлены ведущие 5 и ведомые 6 звездочки, огибаемые тяговым органом, ведущая ветвь которого параллельна ведомому органу конвейера. Тяговый орган выполнен в виде двух пар бесконечно замкнутых контуров (К) 7, кинематически связанных между собой, соединенных в каждой паре щтангами 8 и 9 и выполненных конгруэнтными. Толкатели (Т) 10 щарнирно закреплены на щтангах 8 и 9, расположенных в одной горизонтальной плоскости и установленных на соседних парах К 7. Диаметры звездочек 6 больше диаметров звездочек 5. При помощи щтанг 8, 9 К 7 сообщают Т 10 синхронное движение, при котором вначале Т 10 перемещаются по дуге окружности, равной делительному диаметру звездочки 6, при этом осуществляется плавный разгон тяговых органов конвейера по синусоидальному закону. Затем Т 10 движутся с постоянной скоростью. В конце хода Т 10 замедляют свое движение, двигаясь по дуге окружности, равной делительному диаметру звездочки 5. 1 з.п.ф-лы, 4 ил.
I
7
//////y ////// ////////////////
us. /
//
/
.
/
/f
| Горизонтально-замкнутый конвейер | 1973 |
|
SU925790A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Привод цепного конвейера | 1977 |
|
SU738965A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
