(54) ИСПОЛНИТЕЛЬНЫЙ ОРГАН МАНИПУЛЯТОРА
| название | год | авторы | номер документа |
|---|---|---|---|
| СХВАТ ЗАДАЮЩЕГО ОРГАНА МАНИПУЛЯТОРА | 1972 |
|
SU426804A1 |
| Очувствленный схват манипулятора | 1982 |
|
SU1134361A1 |
| Исполнительный орган манипулятора | 1975 |
|
SU514687A1 |
| Манипулятор | 1979 |
|
SU871991A1 |
| Исполнительный орган манипулятора | 1982 |
|
SU1131648A1 |
| Исполнительный орган манипулятора | 1989 |
|
SU1646845A1 |
| Захватное устройство | 1984 |
|
SU1288048A1 |
| Захват манипулятора | 1988 |
|
SU1593950A1 |
| Автоматическая линия для многопозиционной листовой штамповки | 1986 |
|
SU1470398A1 |
| Манипулятор | 1974 |
|
SU547336A1 |

1
Изобретение относится к области машиIнострсения, в частности к манипуляторам. Известны исполнительные органы манипуляторов, состоящие из корпуса, приводных шарниров и захвата с губкамя.
В известных исполнительных органал манипуляторов захватывание грузов осу- шествляется от одного двигателя, а, вращение захвата вокруг двух взаимно перпендикулярных осей - от двух других двигателай с помощью.7рехзвенных дифференциальных механизмов и зубчатых передач с параллельными и пересекающимися осями.
Однако известное устройство имеет громоздкую и сложную конструкцию,
Цель изобретения - обеспечить компактность и упростить конструкцию.
Для этого предлагаемый исполнительный орган снабжен планетарной передачей, кинематически соединенной с приводом шарнира, при этом на выходном звено этой связи, например, кор)ическом колесе, установлены фиксатор и сателлит планетарной передачи, который соединен с приводом . губок захвата, сами губки жестко закреп-J
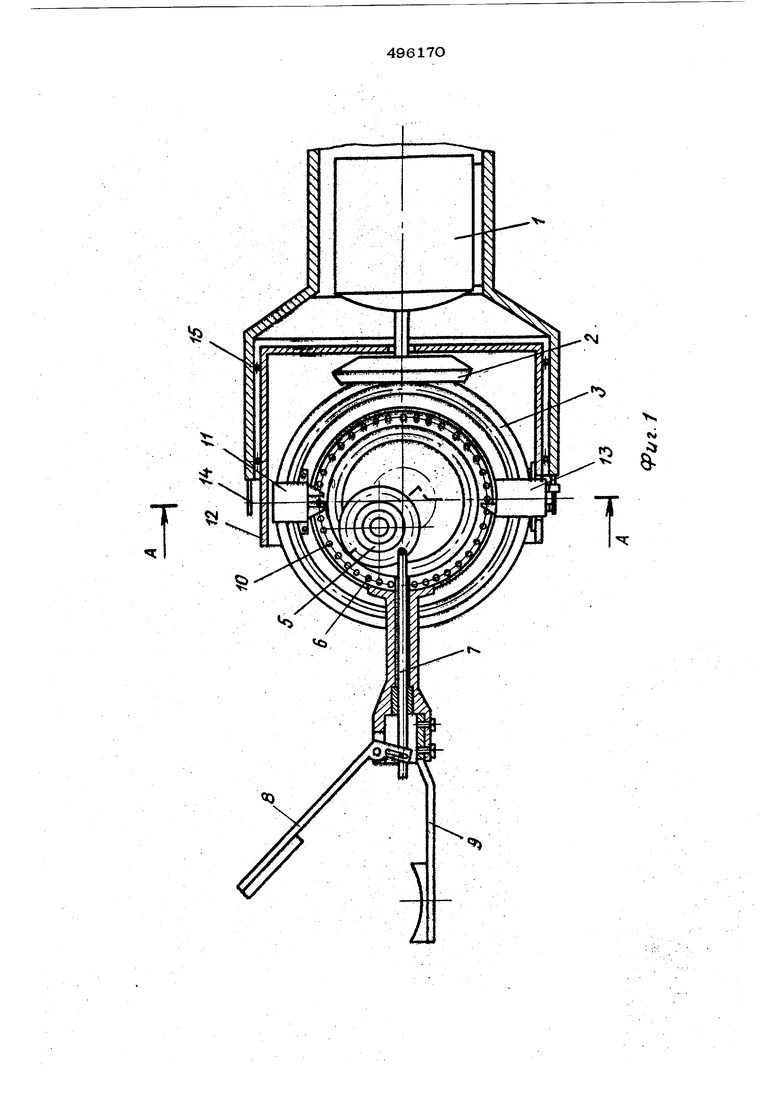
I лены на центральном колесе, а в корпусе захвата встроен второй фиксатор, взаимодействующий с корпусом исполнителыюго |органа для последовательного сведения iгубок и поворота захвата вокруг продоль(ной и поперечной осей. ; На фиг. I изображен исполнительный орган манипулятора, продольный разрез; на фиг, 2 - разрез А-А нафиг. 1. t Исполнительный орган манипулятора содержит двигатель 1, например элект... рический, соединенный с конической шестерней 2. Коническое зубчатое колесо 3 осушествляет кинематическую связь двигателя 1 с планетарной передачей 4, неся на себЦ опору и являясьводнлом iсателлита 5, диаметр начальной окружяоСти которого в два раза меньше диаметра начальной окружности цент{1вльного ко;леса 6 планетарной передачи 4. Тяга 7 шарнирио соединяет подвижнукз губку 8 .захвата с сателлитом 5 в точке, лежа шей на его начальной окружности, и им( ieT возможность прямолинейно о во.чв|5лт1но-поступательного движения. Неподвижная ...:губка 9 захвата жестко со§дмввад с це . ральыым копееом 6, на котором также установлены жесткие фиксирующие пальцы 1О« служащие для фиксвроввНИя по ним )пксатора 11, например, электромагиитлого, Ъакрепленного на коническом аубча. тем колесе 3 я имеющего два выдэигаемых клиновых упора (см. фиг. X). На кор оусв захвата 12 закреплен второй фиксатор 13. имеющий два двухсторонних клановых упора и осуществляющий фиксацию как 00 жестким фиксирующим пальцам 10 так н по жестким фиксирующим пальцам 14« расположенным по окружности а кор. inyce 15 исполнительного органа манипулятора, относительно которого может эращаться корпус захвата 12. Жесткие фиксирующие пальцы 10 и 14 установлены с щагом, определяемым размерами и расположением клиновых упоров фиксаторов (см. фиг. 2). Устройство работает следующим обраэом. Центрельное колесо 6 Планетарной передачи 4 находнтся в расфиксирова.ном состоянии. Вращение от двигателя 1 через; шестерни 2 и 3 конической зубчатой передачи обеспечивает обкатывание сателлита 5 по центральной шестерне 6, что позволяет через тягу 7, совер шающую прямолинейное движение, производить перемещение подвижной губки 8 захвата на зажим груза. При этом обкатывание может производиться из левого положения точки крепления тяги 7 нв сателлите 5 не далее крайнего правого ее положения. При соприкосновении обеих губок захвата с грузом правый клиновой упор фиксатора 13 зафиксирует цент ральное колесо 6 относительно корпуса t2 захватывающего устройства и воспримет, таким образом, крутяший момент который возникает на центральном колесе в при пальнойшем зяжиме rpyaia до .шобходимого усилия. Левый клиновой .1..-L,- iynop фиксатора 13 фиксирует корпус захвата 12 от поворота относительно корпуса 15 руки маи1шулят ра. Порле окончательного зажима груза фиксатор 111 обоими КЛИНОВЫМИ упорами зафиксирует) центральное колесо G относительно зуб;чатого колеей 3. После этого, по необходимости, можно производить вращение захвата 12, либо вокруг продольной оси захвата за счет расфиксирования корпуса 18 левым клиновым упором фиксатора 13 либо вокруг оси, перпендикулярной ей, в плоскости захватьшания при ршсфиксирова НИИ правы1 4 клиновым упором фиксатора 13 центрального колеса 6. фиксация производится дискретно с щвгом, величина которого зависит от требуемрго режима работы захвата 12. МИнимальное значение шага установки жест ких пальцев определяется конструкцией фиксаторов. формула изобретения Исполнительный орган манипулятора, состоящий из корпуса, приводного шарнира и захвата с губками, отличающийся тем, что, с целью обеспечения компактности и упрощения конструкции, он снабжен планетарной передачей, кинематически соединенной приводом щарнира, причем на выходном звене этой связи, например, коническом колесе, установлены фиксатор и сателлит планетарной передачи, который соединен с приводом губок захвата, Ьами губки жестко закреплены на центральном колесе, а в корпус захвате встроен второй фиксатор, взаимодействующий с корпусом исполнительного органа для последовательного сведения губок и поворота захвата вокруг продольной и поперечной осей.
«NJ
tw
2
