(54) СПОСОБ УПРАВЛЕНИЯ ПРОЦЕССОМ ТОРМОЖЕНИЯ
АВТОМОБИЛЯ
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ предупреждения блокирования колеса автомобиля | 1977 |
|
SU783081A1 |
| Способ предотвращения блокированияКОлЕСА АВТОМОбиля | 1979 |
|
SU839789A1 |
| Способ предотвращения скольжения колеса | 1987 |
|
SU1555159A1 |
| Способ регулирования качения колес при торможении автомобиля | 1977 |
|
SU768676A1 |
| Противоблокировочная пневматическая тормозная система задних колес трехосного автомобиля | 1981 |
|
SU962057A1 |
| Способ управления торможением | 1980 |
|
SU935347A1 |
| Пневматическая противоблокировочная тормозная система | 1977 |
|
SU740567A1 |
| Пневматическая противоблокировочная тормозная система | 1977 |
|
SU742201A1 |
| Способ торможения колеса транспортного средства | 1980 |
|
SU927601A1 |
| Способ управления процессом торможения колеса автомобиля | 1977 |
|
SU779120A1 |
1
Изобретение относится к способам и устройствам автоматического управления процессом торможения автомобиля, предотвращающим блокировку колес.
Наиболее близким из известных технических рещений является способ управления процессом торможения автомобиля, заключающийся в периодическом растормаживании колес при выявлении начавщегося их блокирования и повторном их затормаживании после разблокирования, причем растормаживание колес разноименных осей производится неодновременно 1.
Однако в указанном способе промежуток времени между растормаживанием осей определяется временем переключения управляющего блока от датчика и модулятора одной оси к датчику и модулятору другой оси. Величина этого промежутка времени 10 с. Такая величина разновременности растормаживания осей не обеспечивает снижения амплитуды пульсаций суммарной тормозной силы. Увеличение же указанного промежутка времени может привести к снижению качества регулирования из-за позднего выявления блокирования и разблокирования колес. Поэтому способ не
может обеспечить приемлемой комфортабельности движения при торможении. Кроме того, известный способ не предотвращает опережающего растормаживания колес передней оси и запаздывания растормажива5 ния задней оси, что приводит к временной потере устойчивости автомобиля против заноса.
Цель изоретения - повыщение комфортабельности движения и устойчивости авJJJ томобиля против заноса.
Цель достигается тем, что колеса передней оси растормаживают с задержкой во времени по отнощению к началу растормаживания колес задней оси, а величину задержки задают пропорционально длительности периода процесса.
Величина задержки и период процесса связаны соотнощением
At (0,1...0,4)Т,
20
где At - величина задержки;
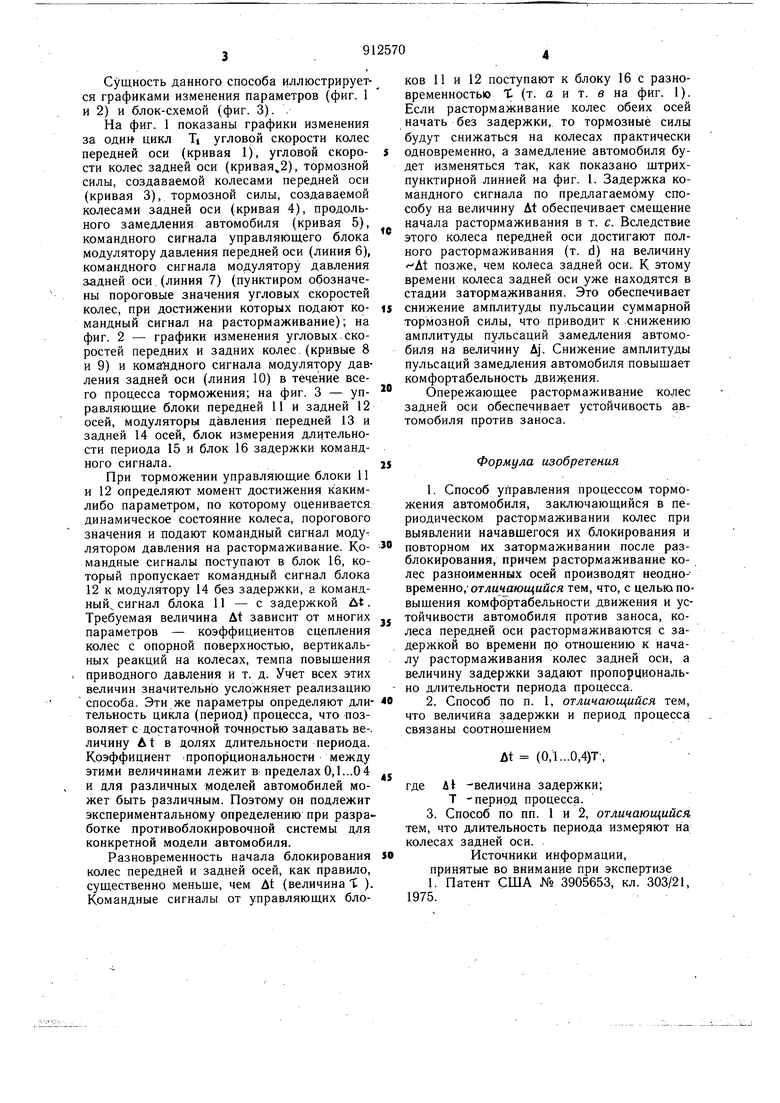
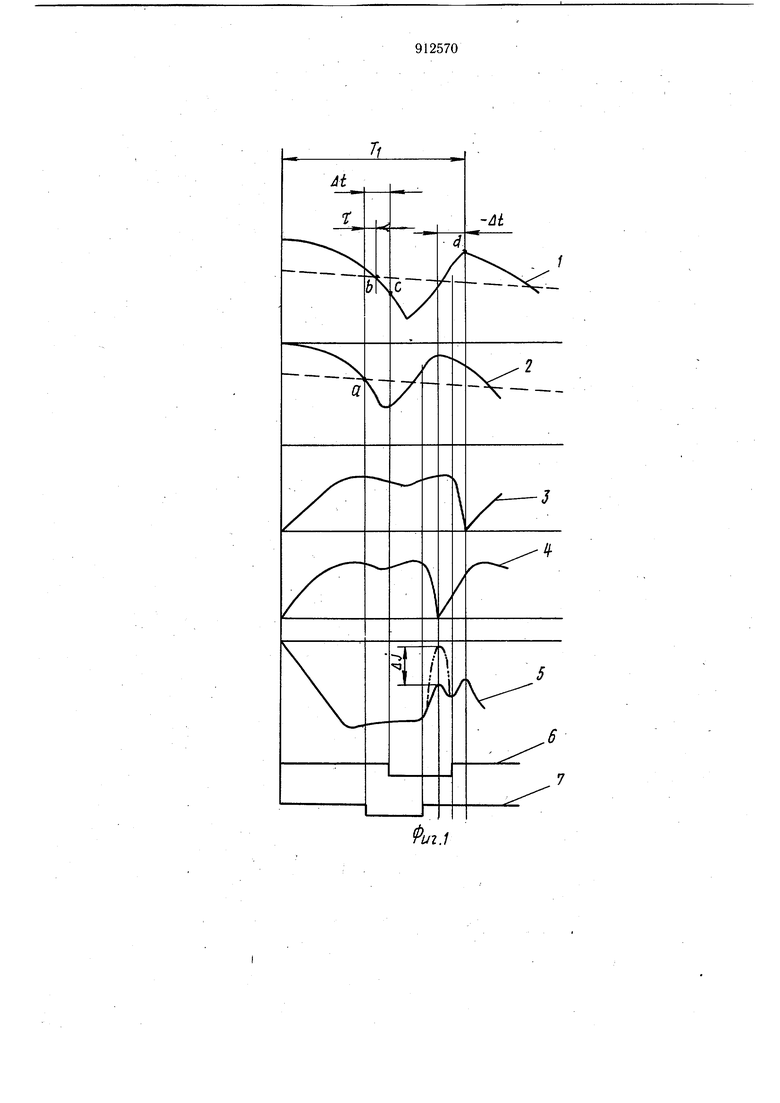
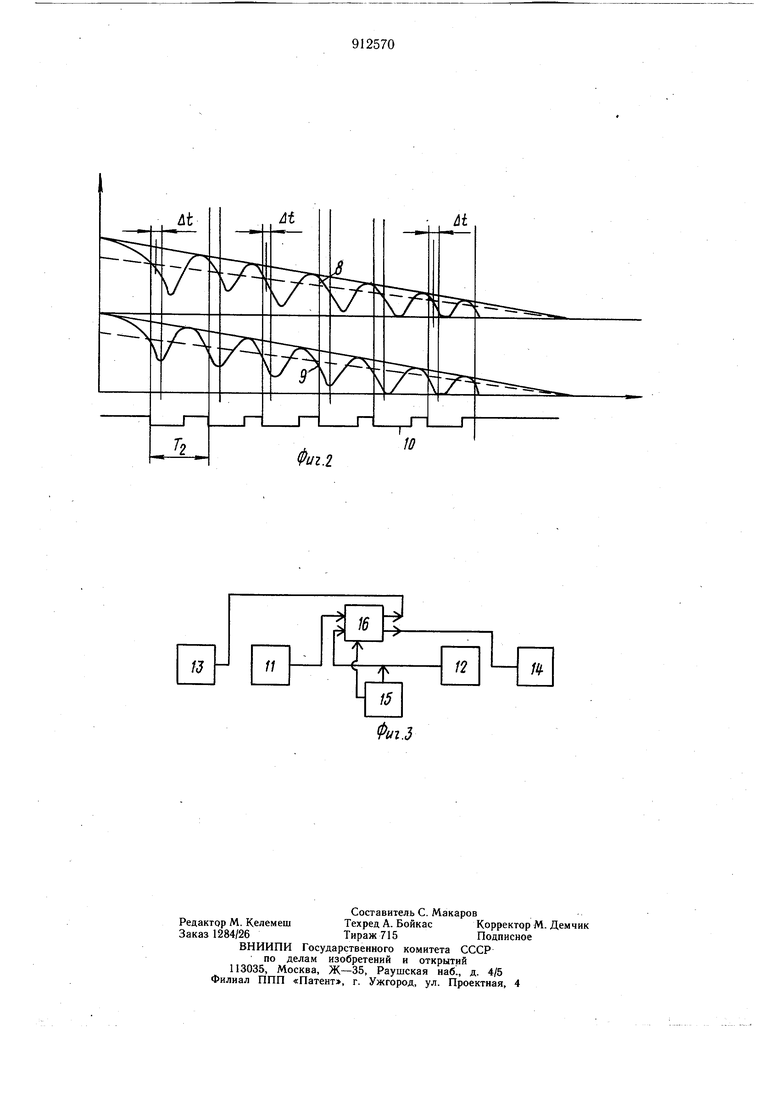
Т период процесса. Длительность периода измеряют на колесах задней оси. Сущность данного способа иллюстрируется графиками изменения параметров (фиг. 1 и 2) и блок-схемой (фиг. 3). . На фиг. 1 показаны графики изменения за оди№ цикл TI угловой скорости колес передней оси (кривая 1), угловой скорости колес задней оси (кривая 2), тормозной силы, создаваемой колесами передней оси (кривая 3), тормозной силы, создаваемой колесами задней оси (кривая 4), продольного замедления автомобиля (кривая 5), командного сигнала управляющего блока модулятору давления передней оси (линия 6), командного сигнала модулятору давления задней оси.(линия 7) (пунктиром обозначены пороговые значения угловых скоростей колес, при достижении которых подают командный сигнал на растормаживание); на фиг. 2 - графики изменения угловых скоростей передних и задних колес.(кривые 8 и 9) и командного сигнала модулятору давления задней оси (линия 10) в течение всего процесса торможения; на фиг. 3 - управляющие блоки передней 11 и задней 12 осей, модуляторы давления передней 13 и задней 14 осей, блок измерения длительности периода 15 и блок 16 задержки командного сигнала. При торможении управляющие блоки 11 и 12 определяют момент достижения какимлибо параметром, по которому оценивается динамическое состояние колеса, порогового значения и подают командный сигнал модулятором давления на растормаживание. Командные сигналы поступают в блок 16, который пропускает командный сигнал блока 12 к модулятору 14 без задержки, а командный сигнал блока 11 - с задержкой Д. Требуемая величина At зависит от многих параметров - коэффициентов сцепления колес с опорной поверхностью, вертикальных реакций на колесах, темпа повыщения приводного давления и т. д. Учет всех этих величин значительно усложняет реализацию способа. Эти же параметры определяют длительность цикла (период) процесса, что позволяет с достаточной точностью задавать ве-. личину At в долях длительности периода. Коэффициент пропорциональности между этими величинами лежит в пределах 0,1...О 4 и для различных моделей автомобилей может быть различным. Поэтому он подлежит экспериментальному определению при разра ботке противоблокировочной системы для конкретной модели автомобиля. Разновременность начала блокирования колес передней и задней осей, как правило, существенно меньще, чем At (величина t ). Командные сигналы от управляющих блоков 11 и 12 поступают к блоку 16 с разновременностью t (т. а и т. в на фиг. 1). Если растормаживание колес обеих осей начать без задержки, то тормозные силы будут снижаться на колесах практически одновременно, а замедление автомобиля будет изменяться так, как показано щтрихпунктирной линией на фиг. 1. Задержка командного сигнала по предлагаемому способу на величину At обеспечивает смещение начала растормаживания в т. с. Вследствие этого колеса передней оси достигают полного растормаживания (т. d) на величину -At позже, чем колеса задней оси. К этому времени колеса задней оси уже находятся в стадии затормаживания. Это обеспечивает снижение амплитуды пульсации суммарной тормозной силы, что приводит к снижению амплитуды пульсаций замедления автомобиля на величину Aj. Снижение амплитуды пульсаций замедления автомобиля повыщает комфортабельность движения. Опережающее растормаживание колес задней оси обеспечивает устойчивость автомобиля против заноса. Формула изобретения 1.Способ управления процессом торможения автомобиля, заключающийся в периодическом растормаживании колес при выявлении начавшегося их блокирования и повторном их затормаживании после разблокирования, причем растормаживание колес разноименных осей производят неодновременно,от-лмчаюы ыыся тем, что, с целью повыщения комфортабельности движения и устойчивости автомобиля против заноса, колеса передней оси растормаживаются с задержкой во времени по отношению к началу растормаживания колес задней оси, а величину задержки задают пропорционально длительности периода процесса. 2.Способ по п. 1, отличающийся тем, что величина задержки и период процесса связаны соотнощением At (0,1...0,4)7, где Д1 -величина задержки; Т -период процесса. 3.Способ по пп. 1 и 2, отличающийся, тем, что длительность периода измеряют на колесах задней оси. . Источники информации, принятые во внимание при экспертизе 1. Патент США № 3905653, кл. 303/21, 1975.
