(54) СПОСОБ УПРАВЛЕНИЯ ПРОЦЕССОМ ТОРМОЖЕНИЯ / . КОЛЕСА АВТОМОБИЛЯ
1
Изобретение относится к автомобилестроению и может быть использовано в автоматических противоблокировочных тормозных системах.5
Известно устройство, в котором циклическое изменение тормозного момента рсуществл$пот при достижении измеряемых в процессе торможения углового замедления и ускорения колеса по- |Q роговых з.начений 1 .
Постоянные пороговые значения, не изменяемые в процессе торможения, не позволяют достичь максимальной эффективности торможения. Наиболее близким по технической сущности к предлагаемому является способ управления процессом торможения колеса, заключающийся в циклическом изменении тормозного момента и в из- JQ мерении в процессе торможения углового замедления и ускорения колеса, причем сигнал на снижение тормозного момента подают при достижении угло-. вым замедлением порогового значения, jj а сигнал на последующее повышение тормозного момента подают при достижении угловым ускорением порогового значения, при этом последнее пороговое значение не превышает величины
порогового значения углового замедления и величины ожидаемого максимума углового ускорения, а пороговое значение замедления корректируют в зависимости от определяемых в процессе торможения скорости движения автомобиля, боковой силы и коэффициента сцепления Колеса с дорогой 2.
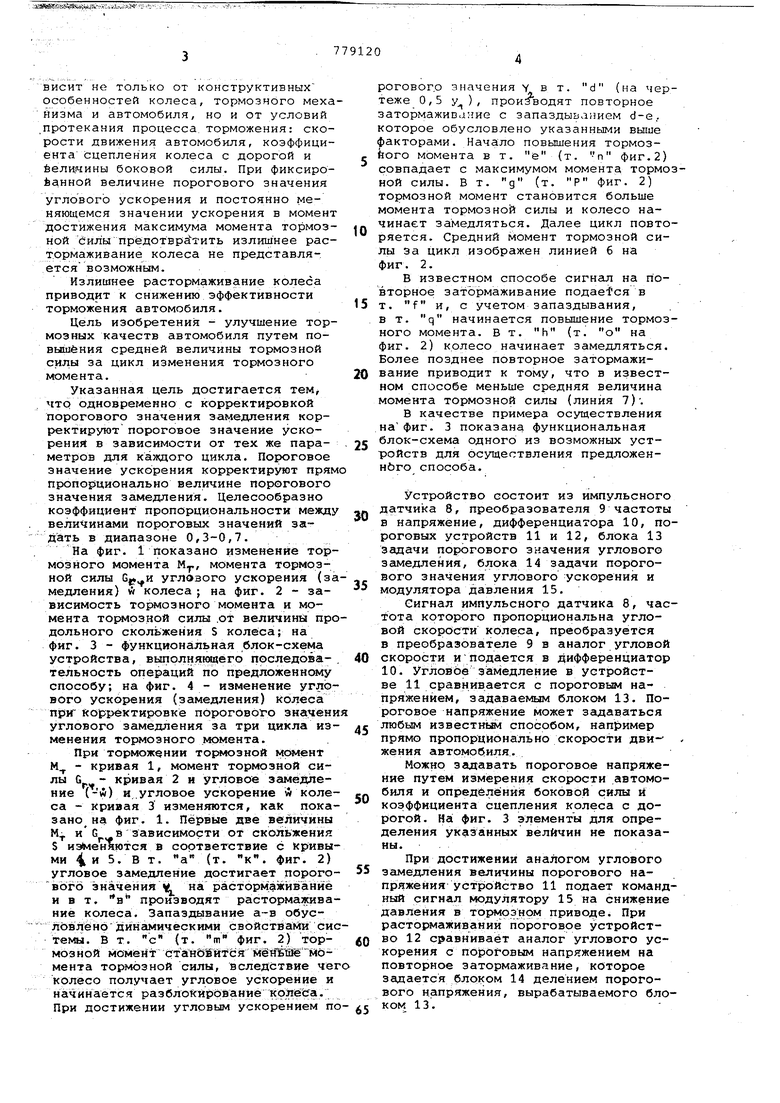
Недостаток известного способа заключается в следующем. Колесо выходит из зоны неустойчивого торможения при растормаисивании в момент достижения моментом тормозной силы точки максимума. При дальнейшем растормаживании величина тормозной сила быстро падает. Затормаживание колеса до достижения точки максимума момента тормозной силы не позволяет вывести колесо из неустойчивой зоны, а затормаживание после прохождения колесом указанной точки приводит к излишнему растормаживанию колеса. Обеспечить затормаживание колеса в момент достижения максимума, момента тормозной силы можно, .задавая пороговое значение ускорени равным ускорению колеса в момент достижения колесом максимума момента тормозной си.лы. Однако величина указанного ускорения за779120висит не только от конструктивных особенностей колеса, тормозного меха низма и автомобиля, но и от условий протекания процесса торможения: скорости движения автомобиля, коэффициента сцепления колеса с дорогой и ёелимины боковой силы. При фиксированной величине порогового значения углового ускорения и постоянно меняющемся значении ускорения в момент достижения максимума момента тормозной силы прёдотвратить излишнее раст.ормаживание колеса не представляется возможным. Излишнее растормаживание колеса приводит к снижению эффективности торможения автомобиля. Цель изобретения - улучшение тормозных качеств автомобиля путем повышения средней величины тормозной силы за цикл изменения тормозного момента. Указанная цель достигается тем, что одновременно с корректировкой порогового значения замедления корректируют пороговое значение ускорения в зависимости от тех же параметров для каждого цикла. Пороговое значение ускорения корректируют прям Пропорционально величине порогового значения замедления. Целесообразно коэффициент пропорциональности между величинами пороговых значений задать в диапазоне 0,3-0,7. На фиг. 1 показано изменение тормозного момента М, момента тормозной силы Е.и углового ускорения (за медления) А колеса j на фиг. 2 - зависимость тормозного момента и момента тормозной силы .от величины про дольного скольжения S колёса; на фиг. 3 - функциональная блок-схема устройства, выполняквдего прследовательность операций по предложенному способу; на фиг. 4 - изменение углового ускорения (замедления) колеса при корректировке порогового значени углового замедления за три цикла из менения тормозного момента. При торможении тормозной момент М - кривая 1, момент тормозной силы Ср„ - кривая 2 и угловое замедление (-Л) и .угловое ускорение w коле са - Кривая 3 изменяются, как пока зано на фиг. 1. Первые две величины М иG б зависимости от скольжения S изменяются в соответствие с кривы ми 4 5. В т. а (т. к, фиг. 2) угловое замедление достигает порого вого значения lit на растормаживание и в т. в производят растормажива ние колеса. Запаздывание а-в обусловлено динамическими свбйстйаМн си темы. В т. с (т. т фиг. 2) тормозной Момент етан6вй СЯМёй БШ МОмента тормозной силы, вследствие че колесо получает угловое ускорение и начинается разблокнррйание колеса. При достижении угловым ускорением п рогового значения у в т. d (на чертеже 0,5 у), производят повторное затормаживание с запаздыва)шем d-e.. которое обусловлено указанными выше факторами. Начало повышения тормозfeoro момента в т. е (т. п фиг.2) совпадает с максимумом момента тормозной силы. Вт. д (т. Р фиг. 2) тормозной момент становится больше момента тормозной силы и колесо начинает замедляться. Далее цикл повторяется. Средний момент тормозной силы за цикл изображен линией б на фиг. 2. В известном способе сигнал на повторное затормаживание подаемся в т. f и, с учетом запаздывания, в т. q начинается повышение тормозного момента. Вт. h (т. о на фиг. 2) колесо начинает замедляться. Более позднее повторное затормаживание приводит к тому, что в известном способе меньше средняя величина момента тормозной силы (линия 7). В качестве примера осуществления нафиг. 3 показана функциональная блок-схема одного из возможных устройств для осуществления предложеннЬго способа. Устройство состоит из импульсного датчика 8, преобразователя 9 частоты в напряжение, дифференциатора 10, пороговых устройств 11 и 12, блока 13 задачи порогового значения углового замедления, блока 14 задачи порогового значения углового ускорения и модулятора давления 15. Сигнал импульсного датчика 8, частота которого пропорциональна угловой скорости колеса, преобразуется в преобразователе 9 в аналог угловой скорости иподается в Дифференциатор 10. Угловое замедление в устройстве 11 сравнивается с пороговым напряжением, задаваемым блоком 13. Пороговое напряжение может задаваться любым известньв способом, нап)имер прямо пропорционально скорости движения автомобиля. Можно згщавать пороговое напряжение путем измерения скорости автомобиля и определения боковой силы и коэффициента сцепления колеса с дорогой. На: фиг. 3 элементы для определения указанных величин не показаны. При достижении аналогом углового замедления величины порогового напряжения устройство 11 подает командный сигнал модулятору 15 на снижение давления в тормознсэм приводе. При растормажива ии пороговое устройство 12 сравнивает аналог углового ускорения с пороговым напряжением на повторное затормаживание, которое задается 14 делением порогового напряжения, вырабатываемого блоком 13. При достижении аналогом углового ускорения порогового напряжения устройство 12 подает командный сигнал Модулятору 15 на повторное затормажи вание. При циклическом повторении процесса пороговые значения корректи руются в каждом цикле. График фиг. 4 иллюстрирует измене ние углового ускорения (замедления) при корректировке пороговых.значений у и у и циклическом изменении тормозного момента. Линия 16 изображае во времени изменение порогового значения углового замедления у , а линия 17 - порогового значения ускорения у , обеспечивающего повторное затормаживание при достижении максимума момента тормозной силы. При этом т. 18 соответствует т. а, т.19 - т. d, аналогично замедления у и у , достигаются ВТ. 20 и 22, а ускорения и у т. 21 и 23. В результате корректировки у, получают значение порогового ускорения; у ку ( на чертеже К 0,5), т.е. величина порогового значения, ускорения у, прямо пропорциональна величине порогового значения замедления у . Величина.коэффициента пропорциональности к определяется конструктивными особенностями тормозного механизма, тормозного привода, элементов противоблокировочного устройства и может для различных типов автомобилей колеба;ться в пределах 0,3-0,7 Предложенный способ позволяет более точно выбрать момент повторного затормаживания, что улучшает тормозные свойства автомобиля вследствие повышения средней тормозной силы за цикл изменения тормозного момента, Формула изобр етення 1, Способ управления процессом торможения колеса автомобиля, заключаюадийся в циклическом изменении тормозного момента и в измерении в процессе торможения углового замедления и ускорения колеса, причем сигнал на снижение тормозного момента подают при достижении угловым замедлением порогового значения, а сигнал на последующее повьийение тормозного момента подеиот при достижении угловым ускорением порогового значения, при этом последнее пороговое значение не превышает величины порогового значения углового замедления и величины ожидаемого максимума углового ускорения, а пороговое значение замедления корректируют в зависимости от определяемых в процессе торможения скорости движения автомобиля, боковой силы и коэффициента сцепления колеса с дорогой, о т л и ч аю и и и с я тем, что, с целью улучшения тормозных качеств автомобиля путем повышения средней величины тормозной силы за цикл изменения тормозного момента, одновременно с корректировкой порогового значения замедления корректируют пороговое значение ускорения в зависимости от тех же параметров для каждого цикла, 2,Способ .по.п. 1, отличающ и и с,я тем,что пороговое значение: ускорения корректируют прямо пропорционально величине порогового значения замедления. 3.Способ по п. 2, отличающийся r&t, что коэффициент пропорциональности между величинами пороговых значений задают в диапазоне 0,3-0,7, Источники информации, принятые во внимание при экспертизе 1,Патент США 3747989, Кл, 303/21, 1972. 2,Патент ОНА 3498683, КЛ, 303/21, 1970 (прототип).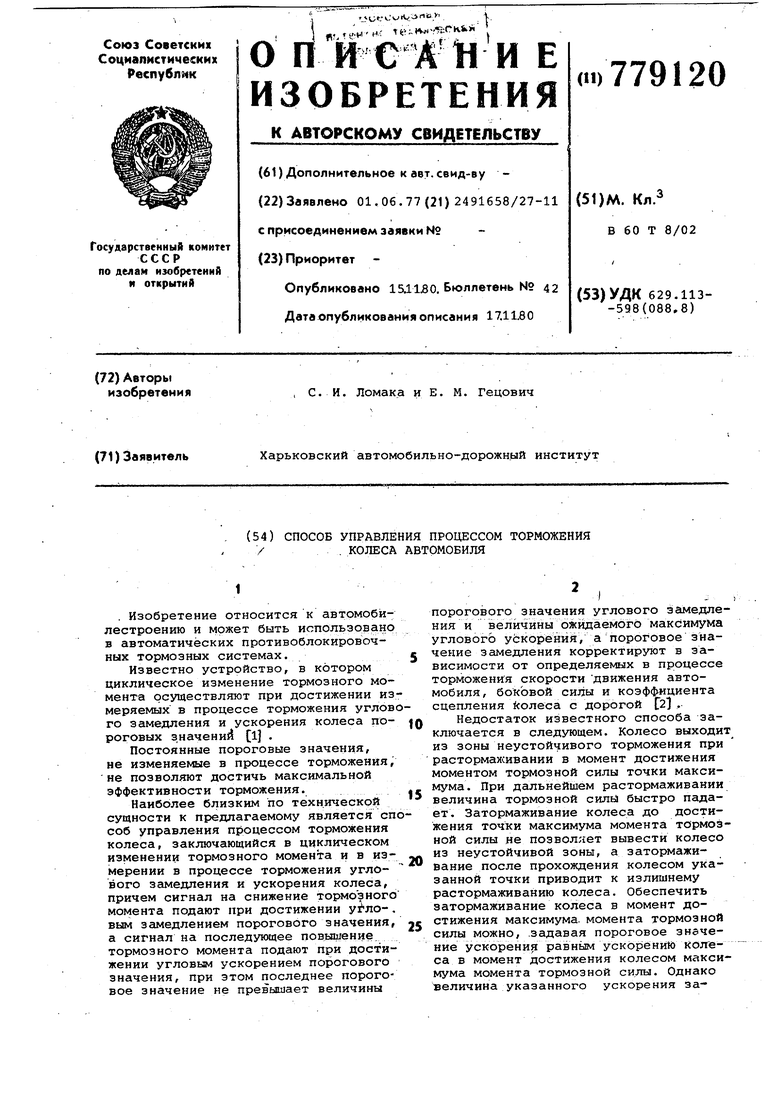
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ регулирования качения колес при торможении автомобиля | 1977 |
|
SU768676A1 |
| Способ предупреждения блокирования колеса автомобиля | 1977 |
|
SU783081A1 |
| Способ предотвращения скольжения колеса | 1987 |
|
SU1555159A1 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ БЛОКИРОВАНИЯ КОЛЕС ТРАНСПОРТНОГО СРЕДСТВА ПОВЫШЕННОЙ ПРОХОДИМОСТИ ПРИ ТОРМОЖЕНИИ | 2000 |
|
RU2211770C2 |
| Способ предотвращения блокированияКОлЕСА АВТОМОбиля | 1979 |
|
SU839789A1 |
| Способ регулирования качения колеса в тормозном режиме | 1980 |
|
SU878627A1 |
| Способ управления процессом торможения автомобиля | 1980 |
|
SU912570A1 |
| Способ предотвращения блокировки колес одной оси автомобиля при торможении | 1976 |
|
SU654465A1 |
| Способ торможения колеса | 1984 |
|
SU1169860A1 |
| Способ торможения колеса транспортного средства | 1980 |
|
SU927601A1 |
. .-; j, f779120
rn-i
l
X
-u
гЛ
