Изобретение относится к пищевой промышленности, а именно к упаковочным устройствам.
По основному авт. св. № 50.1015 известно устройство для укладки штучных предметов, содержащее питатель изделий, укрепленный на горизонтальном валу ротор с радиальными захватами, кинематически связанными с валом ротора посредством дополнительных валов, и опору для тары 1.
Недостатками устройства являются знакопеременные осевые нагрузки, возникающие при вращении захватов относительно осей, перпендикулярных валу ротора, и большие габариты, описываемые вращающимися захватами. В таком устройстве вращение захватов сопровождается возникновением переменных по величине и направлению сил, действующих вдоль оси горизонтального приводного вала. В интервале каждого оборота захвата эта сила дважды возрастает от. нуля до максимального значения и дважды уменьшается от максимума до нуля, причем направление действия силы во второй половине интервала оказывается противоположным ее направлению в первой половине интервала. Знакопеременные осевые нагрузки, возникающие при работе устройства, способствуют раскачиванию захватов, что ухудшает качество укладки ба,нок iB ящики. Во избежание раскачивания захватов уменьшают скорость вращения ротора, однако при этом снижается производительность устройства.
Целью изобретения является уменьшение динамических нагрузок и повышение производительности.
Указанная цель достигается тем, что в
10 устройстве для укладки штучных предметов кинематическая связь каждого захвата с валом ротора имеет механизм для сообщения захвату возвратно-поступательного движения перпендикулярно оси, па15 раллельной валу ротора.
При этом механизм каждого захвата содержит пазовый кулачок, жестко связанный с ротором, и установленный перпендикулярно оси одного из дополнительных ва20лов толкатель, на одном конце которого укреплен приводной ролик для взаимодействия с пазом кулачка, а захват смонтирован на другом конце толкателя, при этом пазовый кулачок расположен соосно
25 с дополнительным валом.
При этом Каждый толкатель выполнен в виде П-образной вилки, оба пальца которой укреплены подвижно в подшипниковых направляющих, смонтированных на
30 одном из дополнительных валов.
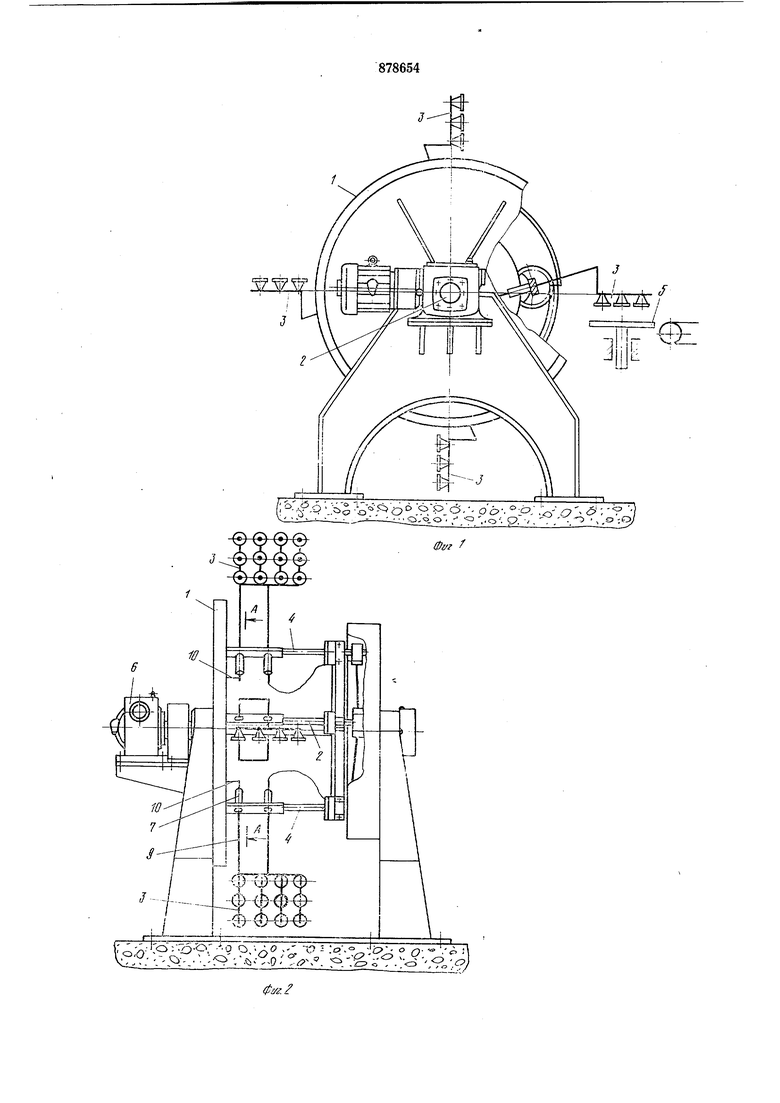
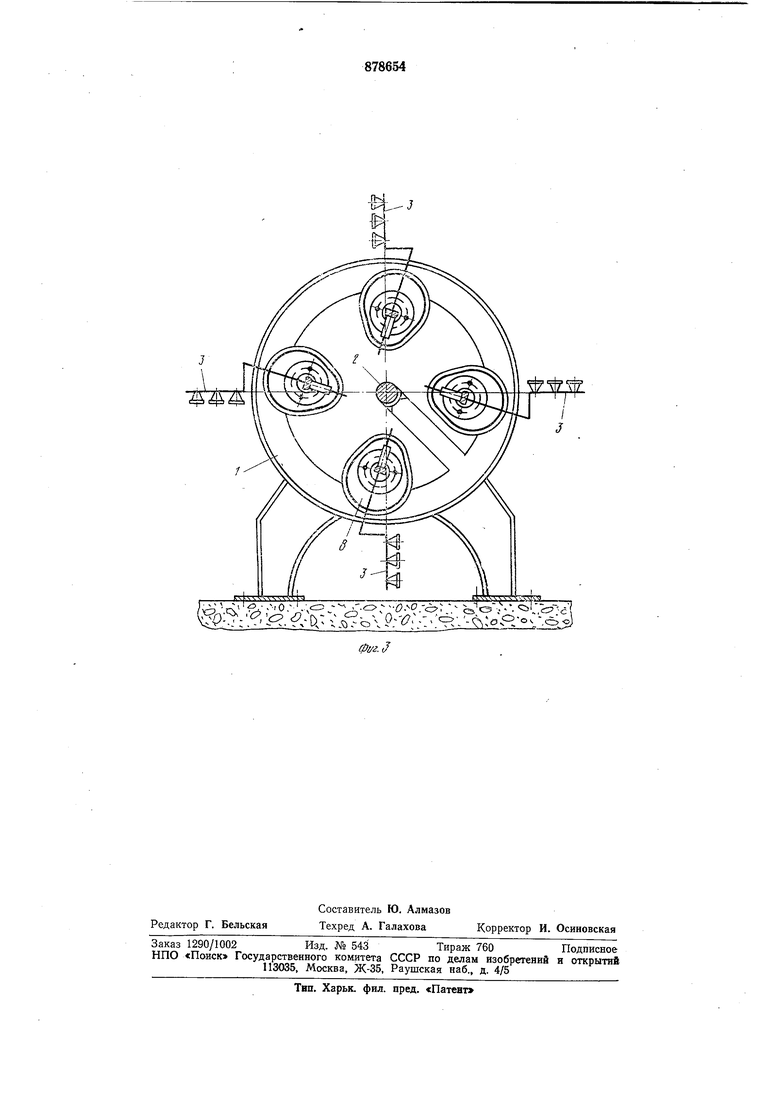
На фиг. 1 изображено устройство для укладки штучных предметов, вид спереди; на фиг. 2 - то же, вид сбоку; на фиг. 3- разрез Л-А на фиг. 2.
Устройство содержит ротор 1, укрепленный на горизонтальном валу 2, с радиальными захватами 3,, кинематически связанными с валом 2 посредством дополнительных валов 4, опору 5 для тары и привод 6, при этом кинематическая связь каждого захвата 3 с валом 2 ротора / имеет механизм для сообщения захвату возвратно-поступательного движения перпендикулярно оси, параллельной валу 2 ротора /. Механизм содержит подшипниковые направляющие 7, пазовый кулачок 8, жестко связанный с ротором J, и установленный перпендикулярно оси одного из дополнительных валов 4 толкатель 9, выполненный в виде П-образной вилки, оба пальца которой укреплены подвижно в подшипниковых направляющих 7, смонтированных на одном из дополнительных валов 4. На одном конце толкателя укреплен приводной ролик 10 для взаимодействия с пазом кулачка 8, а захват 3 смонтирован на другом конце толкателя 9.
Устройство работает следующим образом. Транспортером щтучные предметы подают :на позяцию загруэк1И; 1включают привод 6, обеспечивающий вращение ротора / с захватами 5. Пальцы захватов 3 с присосками захватывают предметы и переносят их к опоре 5 для тары в позицию разгрузки, при этом дополнительные валы 4 вращаются вместе с ротором / и приводной ролик 10 толкателя 9 взаимодействует с пазом кулачка в, и жестко связанной системе толкатель 9 - захват 3 сообщается вращательное и одновременно возвратно-поступательное движение относительно вала 4. В результате захват выходит из тары с щтучными предметами, проходит между валом 2 ротора / и дополнительным валом 4 и до подхода к позиции загрузки завершает полный оборот. Далее цикл укладки повторяется.
Использование предлагаемого устройства позволяет избежать осевых нагрузок при пульсирующем вращении .захватов и уменьшить габариты, описываемые вращающимися захватами. Устранение осевых нагрузок, в свою очередь, позволяет повысить эксплуатационную надежность устройства без снижения скорости движения захватов и, следовательно, повысить его
производительность за счет уменьшения внецикловых потерь рабочего времени.
Формула изобретения
1. Устройство для укладки штучных предметов по авт. св. № 501015, отличающееся тем, что, с целью уменьшения динамических нагрузок и повышения производительности, кинематическая связь каждого захвата с валом ротора имеет механизм для сообщения захвату возвратно-поступательного движения перпендикулярно оси, параллельной валу ротора.
2. Устройство по п. 1, отличающееся тем, что механизм каждого захвата содержит пазовый кулачок, жестко связанный с ротором, и установленный перпендикулярно оси одного из дополнительных
валков толкатель, на одном конце которого укреплен приводной ролик для взаимодействия с пазом кулачка, а захват смонтирован на другом конце толкателя, при этом пазовый кулачок расположен соосно
с дополнительным валом.
3. Устройство по пп. 1 и 2, отличающееся тем, что каждый толкатель выполнен в виде Н-образной вилки, оба пальца которой укреплены подвижно в
подшипниковых направляющих, смонтированных на одном из дополнительных валов. i. . - , .
Источник информации, принятый во внимание при экспертизез
1. Авторское свидетельство СССР № 501015, кл. В 65 В 5/10, .1973. (S:S в
iSiMMii M o g:5:v: - ig:
сч - о - - ч Х- v .-оГ V sC3.
;. L. ;а: .(:oO-o -.cbs)
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ УКЛАДКИ ШТУЧНЫХ ИЗДЕЛИЙ | 2003 |
|
RU2248313C1 |
| Устройство для укладки штучных предметов | 1976 |
|
SU648468A2 |
| УСТРОЙСТВО ДЛЯ ГРУППОВОЙ УКЛАДКИ ИЗДЕЛИЙ | 1996 |
|
RU2142391C1 |
| УСТРОЙСТВО ДЛЯ ПОСЛОЙНОЙ УКЛАДКИ ШТУЧНЫХ ИЗДЕЛИЙ В ТАРУ | 2008 |
|
RU2375271C1 |
| УСТРОЙСТВО ДЛЯ ГРУППОВОЙ УКЛАДКИ ПРЕДМЕТОВ | 2001 |
|
RU2220888C2 |
| МАШИНА ДЛЯ ПОСЛОЙНОЙ УКЛАДКИ ИЗДЕЛИЙ В ТАРУ | 2005 |
|
RU2278804C1 |
| Устройство для укладки штучных предметов | 1975 |
|
SU527341A2 |
| МАШИНА ДЛЯ УКЛАДКИ ШТУЧНЫХ ИЗДЕЛИЙ В ТАРУ | 1994 |
|
RU2118274C1 |
| УСТРОЙСТВО ДЛЯ ПОСЛОЙНОЙ УКЛАДКИ ШТУЧНЫХ ПРЕДМЕТОВ | 1996 |
|
RU2146213C1 |
| Устройство для укладки штучных предметов | 1976 |
|
SU737299A2 |