1
Изобретение относится к промышленному транспорту, в частности к устройствам управления конвейерными системами для перемещения преимущественно тарно-штучных грузов, и может быть использовано в товарно-распределительных зонах экспедиций автоматизированных складов, а также в автоматнзировапных системах управления технологическими процессами (АСУТП) и автоматизированных технологических комплексах (АТК) различных отраслей промышленности, где требуется автономное несинхронное перемещение каждой грузоединицы, ее фиксированный останов в любой точке транспортной сети, автоматическое локальное наконление, распределение и сбор грузов.
Известно устройство управления конвейерной системой, состоящее из генератора импульсов с переключаемой длительностью тактов, соединенного своими выходами соответственно через иовторитель и инвертор с блоками унравления нечетными и четными механизмами, датчиков включения механизмов и логических элементов И и ИЛИ. Входы взятых по числу механизмов элементов И соединены соответственно с прямыми выходами датчиков включения соответствующих механизмов.
Входы каждого из элементов ИЛИ, взятых по числу групп механизмов с одинаковой длительностью пуска, соединены с выходами элементов И, соответствующих ме5 ханизмам одной группы, а выходы элементов ИЛИ - с соответствующими различной длительности такта входами генератора импульсов 1. Недостатком этого устройства является
10 то, что оно нмеет сложную конструкцию, так как требует специальных блоков для запуска конвейеров, снижается производительность и повышается расход электроэнергии за счет того, что при пуске конвейеров сблокированной цепи в последовательности, обратной ходу материалов, неизбежна холостая работа электродвигателей, пока не начнет работать последний но пуску конвейер и пока материал не достиг20 нет первого по пуску конвейера.
Известно устройство управления конвейерной системой, содержащее измеритель производительности начального конвейера линии, блоки контроля скорости движения
25 тяговых органов и блоки управления электроприводами по числу отдельных конвейеров линии, блоки выбора программы запуска, сумматоры и секционированный по числу конвейеров последовательный регистр,
сдвиговые входы секции которого подключены к блокам контроля скоростн соответствующих конвейеров. Выходы ячеек каждой секции последовательного регистра через сумматор и блок выбора программы запуска соединены с блоками управления электроприводами соответствующих конвейеров линии, причем выход сумматора каждой нредыдущей ceKiuui регистра соединен с входом блока выбора программы запуска каждого следующего в направлении грузопотока конвейера 2.
Устройство требует для зануска конвейерной системы сиециальных электронных блоков вычислительной техники, что усложняет конструкцию, сужает область применения, снижает нроиззодительиость и повышает расход электроэнергии по той же нричине, которая указана в онисанном выше устройстве.
Наиболее близким к изобретению по технической сущности является устройство для унравления конвейерной системой, которое содержит блоки электропривода конвейерами, связанные с первыми выходами соответствующих блоков управления и с, первыми входами блоков управления предыдущих по направлению движения грузов конвейеров, включающими два элемента ИЛИ, элемент И и элемент «Запрет, причем выход одного из элемептов ИЛИ соединен с входом элемента «Занрет, датчики наличия груза на выходных концах конвейеров, подключенные к вторым входам соответствующих блоков управления и к третьим входам блоков управления носледующих по направлению движения грузов конвейеров 3.
К недостаткам известного устройства относятся невозможность использования в разветвленных конвейерных системах, повышенный расход электроэнергии, синхронное перемещение грузов и блокировка конвейеров в последовательности, обратной направлению движения грузов, которые производительность при транспортировке тарно-штучных грузов, сложность блоков управления и применение элеме} тов времени, которые уменьшают надежность.
Целью изобретения является расширение функциональных возможностей и экономия электроэнергии.
Цель достигается тем, что предлагаемое устройство снабжено датчиками наличия груза на входных концах конвейеров, иодключенными к четвертым входам соответствуюших блоков управления и к пятым входам блоков управления предыдущих по направлению движения грузов конвейеров.
При этом блок управления каждого конвейера может быть снабжен третьим элементом ИЛИ и элементом НЕ, вход которого снабжен третьим элементом ИЛИ и
элементом НЕ, В1лход которого соединен с первым входом licpBoio элемента ИЛИ, а иыход элемента «Запрет подключен к первому входу второго элемента ИЛИ, выход которого и выход третьего элемепта ИЛИ подключены к входам элемента И, выход которого является выходом блока управлеппя, а ыорые вx(JДl)I первого п второго элементов ИЛИ, входы тречьего э.темеита
ИЛИ и вход элеме)1та яв.чяются входами блока управлепия.
Блок управления каждого конвейера может быть снабжен вторым элементом «Запрет и вторым элементом И, первый вход
которого соединен с выходом первого эле.мента ИЛ1--1, а выходы второго элемепта «Запрет и второго элемепта И подключены к второму и третьему входам второго элемепта ИЛИ, при этом входы второго
элемепта «Запрет, второй и третий входы второго элемента И являются входами блока управле}и-1я.
Блок управлепия каждого конвейера .может быть спабжен вторым э.темепто.м «Запрет, ВЫХО71, которого подключен к одному из входов третьего элемепта ИЛИ, а входы являются входами блока управлепия.
Блок управлеппя каждого конвейера может быть спабжен третьим элементом «Запрет, выход которого подключен к третье.му вход второго элемепта ИЛИ, а входы являются входамп блока управлепия.
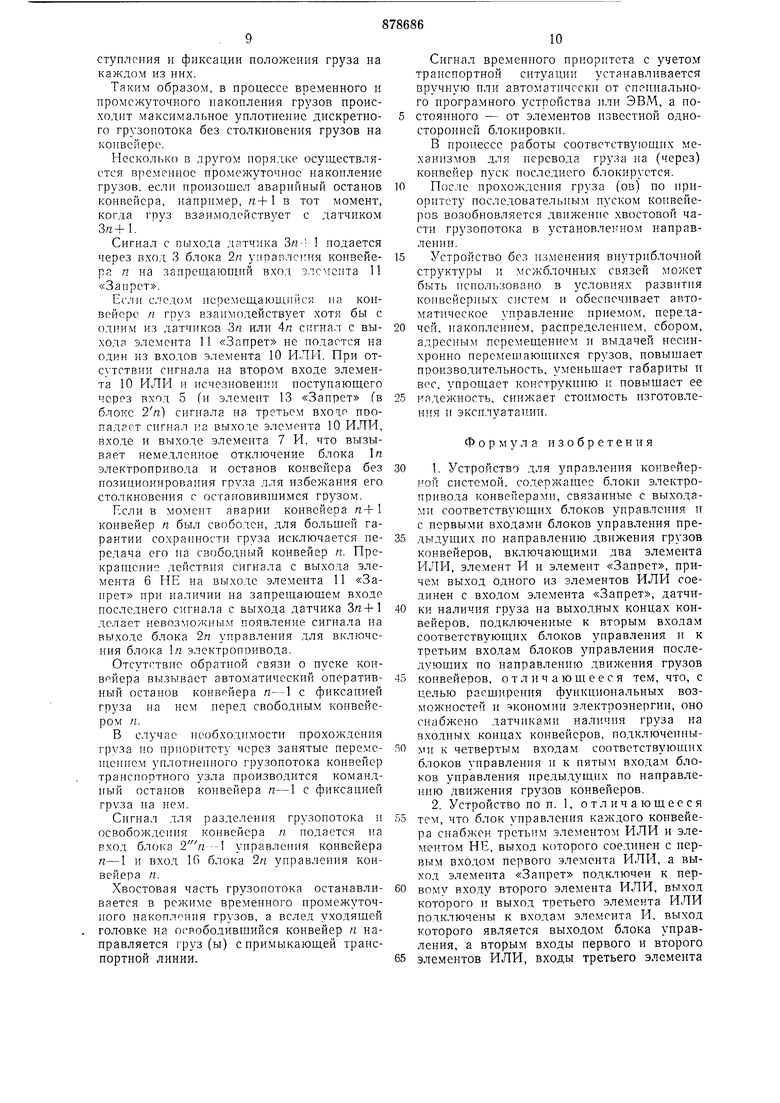
На фиг. 1 условпо изображена часть конвеперпой системы н блок-схе.мы устройства;
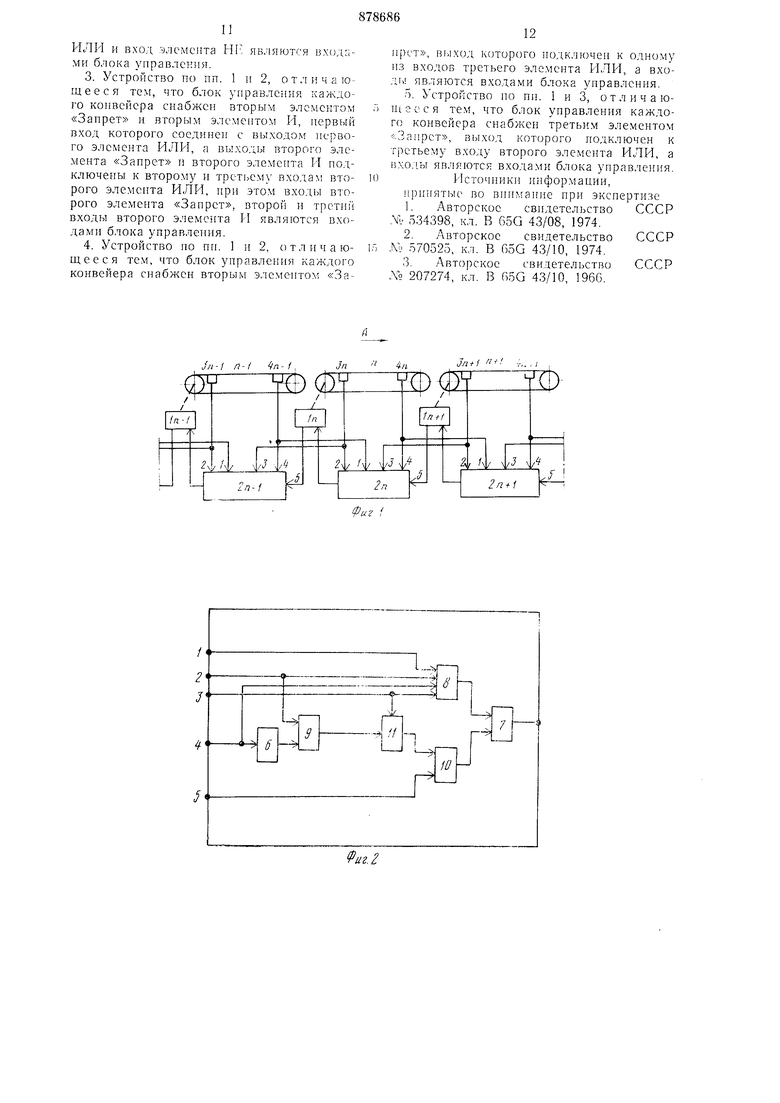
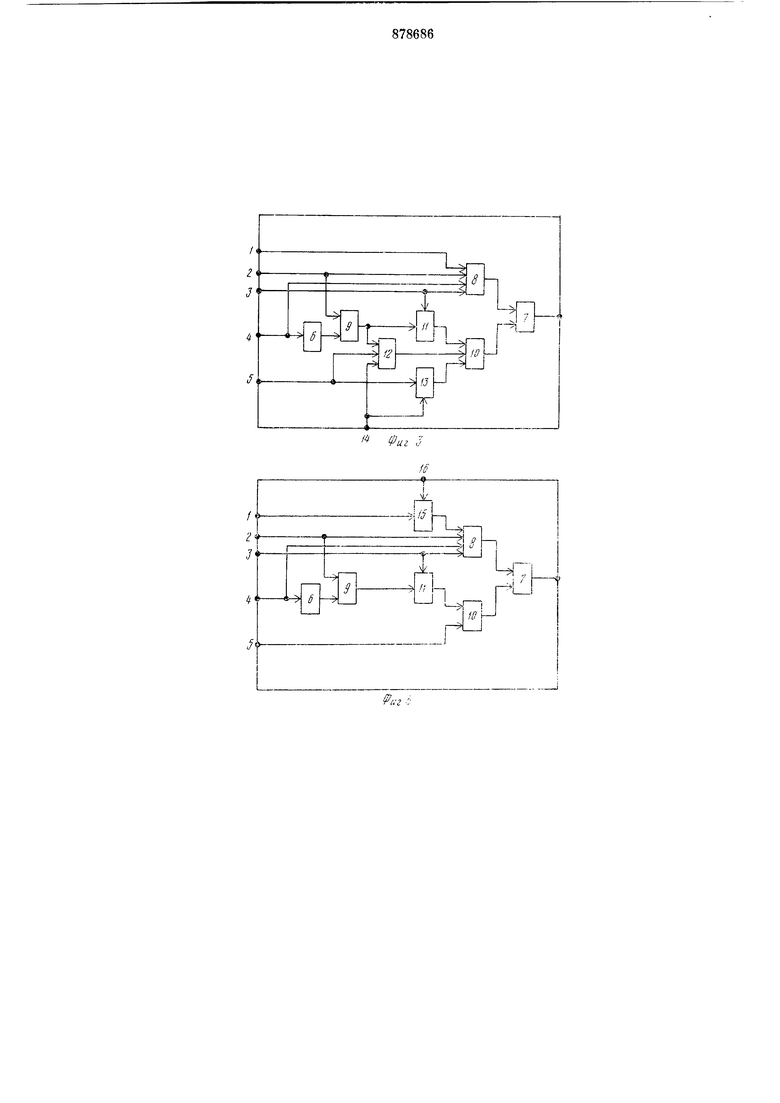
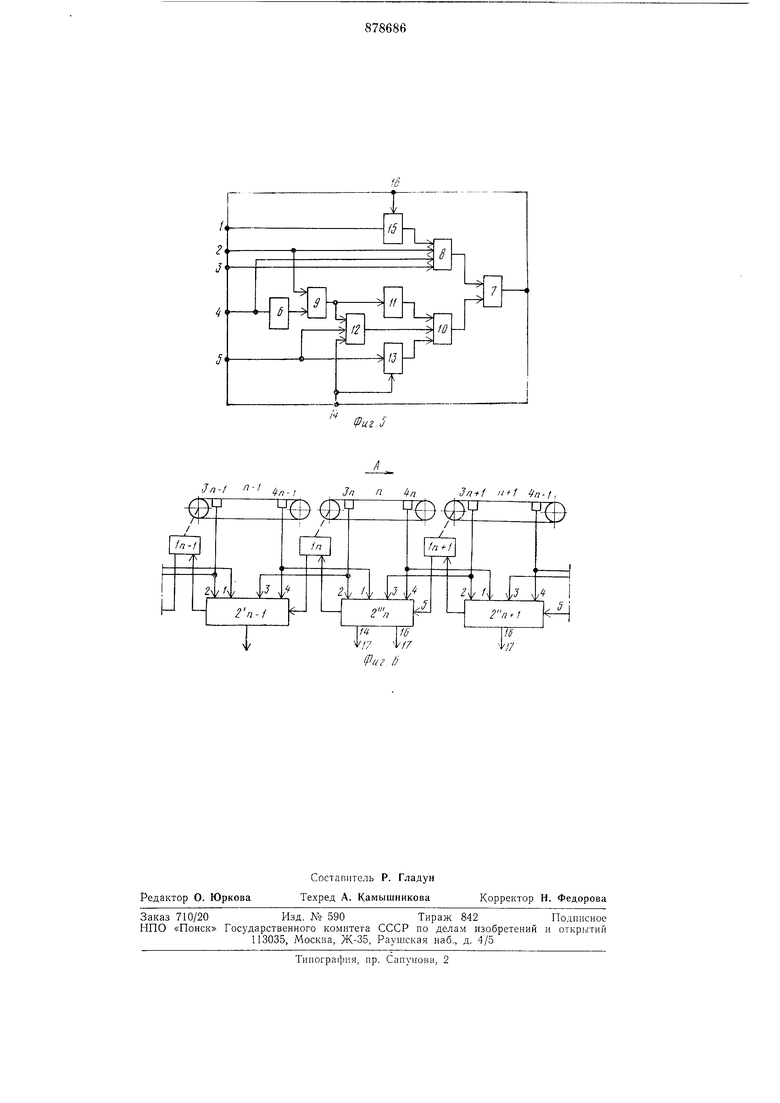
па фиг. 2 - логическая схема блока управления конвейером основного исполнения; на фиг. 3 - логическая схе.ма блока управления коивейером управлепия первой модификации; иа фиг. 4 - логическая схема блока управлеиия конвейером третьей модификации; на фиг. 5 - логическая схема блока управления конвейером третьей .модификации; иа фиг. 6 - часть конвейерной системы и блок-схемы транспортного
узла.
Конвейерная система еостоит из yV конвейеров, ио которым перемеп1:аются грузы в паправленпп А.
Каждый конвейер, например п (с.м. фиг. 1) имеет блок п электропривода, к которому подключеп блок 2л унравлепия с входа.ми 1-5. На входном i выходиом копцах копвейера установлены датчики Зп и
4л наличия груза.
Выход датчика 3л наличия груза подключеп к входу 2 блока 2л управления и к входу 3 блока 2л-1 управления, а выход датчика 4л - к входу 4 блока 2л управлспия п к Bxo.iy 1 блока 2л + 1 з-правления.
Вход блока 2л управленпя связап с выходо.м датчика 4л - - 1 наличия груза, а вход 5 - с выходом блока 1л + 1 электропривода.
Блок 2/7. управления (см. фиг. 2) выполнен на элементах 6 НЕ, 7 И, 8-10 ИЛИ и 11 «занрет.
Четыре входа элемента 8 ИЛИ соединены соответственно с входами 1-4 блока 2п управления.
Однн из входов элемента 9 ИЛИ подключен к входу 2 блока 9.п унравления, а другой - к выходу элемента 6 НЕ, вход которого связан е входом 4 блока 2п управления.
Выход элемента 9 ИЛИ соединен с входом элемента 11 «Запрет, запрещающий вход которого связан с входом 3 блока 2/. управления.
Выход элемента 11 «Запрет подключен к одному из входов элемента 10 ИЛИ, другой вход которого связан с входом 5 блока 2/7 унравления.
Вьуходы элементов 8 п 10 11ЛИ соединены соответствующими входами элемента 7 И, выход которого связан с выходом блока 2п унравления.
Блок 2/г управления первой модифнкании (см. фиг. 3) используется для команд1 ого останова ко)1вейеров е фиксацией положения груза с целью изменеиия направления дальнейшего движеиия груза еоглаено заданного маридрута в транспортных узлах (местах пересечения и соединения грузопотоков и их разветвления) многосложных конвейерных систем и содержит, в отличие от онисанного выше, элемент 12 И и 13 «Заирет.
Элемеит 13 «Запрет включен в существуюЩую связь входа 5 блока 2/г управления с другим входом элемента 10 ИЛИ, а его запрещающий вход связан с входом 14.
элемента 12 И соединен с третьим входом элемента 10 ИЛИ, один из входов - с выходом элемента 9 ИЛИ, а два других входа - соответственно с входами 5 и 14 блока 2/7 унравления.
Блок управления второй модификации (см. фиг. 4) иепользуется для командного оетанова конвейеров без груза и содержит, в отличие от блока управления основного исиолиения, элемент 15 «Запрет, включенпы в сун1,ествурон1.ую связь входа 1 блока 2п уипавлення с однчм нз входов элемента 8 11ЛИ. Занрен ающий вход элемента 15 «Запрет связан с входом 16 блока унравления.
Блок знравления третьей модификации (см. фиг. 5) выиолняет комплексные функции командного останова конвейеров как с грузом, так и свободных и содержит в отличие от блока 2п основного исполнения элементы 12 И и 13, 15 «Занрет, которые нодключены аналогичным образом как н в блоках 2/г и управления первой и второй мо.чификаций.
К входам 14 и 16 блоков 2п, и и унравлення всех модификаций (см. фиг. 6) подключается специальное устройство 17 для ручного или автоматического адрееования или ЭВМ.
Блоки электроприводов конвейеров транспортных узлов связываются (не показаны) известным образом для перевода взаимной блокировкой с электроприводами соответствующих механизмов для перевода грузов на конвейеры транспортных линий других направлений.
Устройство работает следующим образом.
Иоступающий на конвейер «-1 груз взаимодействует е датчиком 3/7-1, выходной сигнал которого подается на вход 2 блока 2/7-1 управления и в дальнейшем через элементы 8 ИЛИ и 9 ИЛИ, И «Запрет, 10 ИЛИ на оба входа элемента 7 И.
Появление сигнала на выходе элемента 7 И обеспечивает включение блока 1/7-1 электропривода конвейера п-1.
Перемещение груза по конвейеру п-1 вызывает срабатывание датчика 4/7-1 на выходном конце конвейера п-1.
Сигнал датчика 4/7-1 подается через вход 4 блока 2/г-1 управления на другой вход элемента 8 ИЛИ, дублируя ранее появившийся сигнал на нервом входе элемента 8 ИЛИ, и на вход элемента 6 НЕ, исключая сигнал на его выходе. Сигнал датчика 4/7-1 подается через вход 1 блока 2/г управления и элемент 8 ИЛИ на один из входов элемента 7 И.
Ирн наличии сигнала на другом входе элемента 7 И, подаваемого с выхода элемента 10 ИЛИ, один из входов которого нолучает сигнал с выхода элемента 6 НЕ через элементы 9 ИЛИ и 11 «Запрет, на выходе элемента 7 И и выходе блока 2/г унравления появляется сигнал, который постуиает в блок 1/7 электропривода конвейера п. Последний включается в работу для прнема груза, подаваемого конвейером
/7-1.
Сигнал обратной связи о действии конвейера л через вход 5 блока 2/г-1 управления направляется на другой вход элемента 10 1-1ЛИ, что обеспечивает сохранность сигиала на выходе последнего в период
взашгодействия груза е датчпком 4/7-1 после освобождения датчика 3/7-1, исчезновения ранее поданного на один из входов элемента 10 Р1ЛИ сигнал.
Поступление груза на конвейер п фиксируется датчиком 3/7, сигнал которого подается на вход 2 блока 2/7 управления и на вход 4 блока 2/ - 1 управления, дублируя ранее поступившие сигналы на входы 1 и
4 соответствующих блоков 2п и 2п-1 управления.
Это нозволяет после освобождения датчика 4/г-1 наличия груза иодавать оставшийся на выходном конце конвейера ti-r
груз на действующий конвейер п.
Останов свободного конвейера п-1 осуществляется только после прохождения датчика Зп наличия груза на конвейере п. В этом случае сигнал на входе 3 блока 2л-1 управления исчезает, что вызывает пропадание сигнала на его выходе и отключение блока In-1 электропривода конвейера п-1.
В дальнсйп1ем последовательное автономное неремеп;ение груза конвейером п н другими конвейерам выполняется аналогично описанному выше.
Рассмотрим некоторые варианты неремещения в многосложных разветвленных конвейерных системах, где в состав одного из транспортных узлов (места пересечения двух грузопотоков, разветвле}П1е грузопотока или его соединение) включен конвейер, например, п.
Порядок иеремещения грузов конвейером п нерегулируемого транспортного узла (места пересечения двух линий или стыковки иодводяндей боковой линии с магистральной) определяется только сигналами известных средств блокировки взаимодействующих механизмов.
Конвейер п всегда принимает независимо от направления движения нрибывший к нему груз.
Соответствующие чханизмы нрои.людят передачу груза с одной линии на другую или через магистральную линию только при свободном конвейере п.
Ко.манднЕлй останов входящего в состав траиспортпого узла (перекрестка или места ответвления) конвейера п с фиксацией положеиня груза производится для изменения направления дальнейшего движения гр)за согласно заданного маршрута.
Для этого на вход 14 (см. фиг. 3) блока 2я управления и вход 16 (см. фиг. 4) блока управления конвейера п+1 подается сигнал вручную или автоматичееки от специального устройства адресования или ЭВМ.
Появление сигнала на запрещающем входе элемента 13 «Запрет блока 2л управления, если конвейер п+1 неремещает груз, позволяет исключить подачу сигнала с выхода блока 1л+1 электропривода через вход 5 и элемент 13 «Запрет на одии из входов элемента 10 ИЛИ.
В то же время подача сигнала через вход 14 на один из входов элемента 12 И при наличии сигнала на другом входе, поступающем с входа 5, н сигнала н третьем входе с выхода элемента 9 ИЛИ обеспечивает посылку сипглла с выхода элемента 12 И на другой вход элемеита 10 ИЛИ.
Таким образом, сохраняется сигнал на выходе элемеита 10 ИЛИ и одном из входов элемеита 7 И. При наличии сигнала на другом входе элемента 7 И это позволяет обеспечить непрерывную работу блока 1л
электропривода в том случае, если исчезает сигнал на третьем входе элемента 10 ИЛИ в результате того, что контролирующий нолол ение неремещаемого конвейером п+1 груза датчик Зп+1 направляет сигнал через вход 3 блока 2п управления на запрещающий вход элемента П «Запрет.
Останов конвейера ,сствляется в тот
момент, когда перемещаемый им груз, воздействуя на датчик 4п, освобождает датчик Зп, т. е. занимает фиксированное гол(1жеиие. Это обуславливает пропадание еигнала
иа обоих входах и В1;1ходе элемеитэ 9 ИЛИ, на входе н выходе эле.мента II «Запрет при отсутствии запрещающего сигнала, па одном из входов н Bi,ixo;ie элсме ггс1 12 И, на двух входах 3 (на третьем сигнала не может быть) и выходе элеме1гга 10 ИЛИ и, наконец, на од11ом из входов и выходе элел{ента 7 И, что приводит к отключению блока 2п управления. Рассмотренные выше и другие варианты
движения грузов в разветвленных транспортных системах, связанные с необходимостью остаиопа конвейера н фиксации груза иа пем, а также аварийный останов любого котшейера с грузом, прогиедшим
|Ходн()П , п( ;юзмо;к11().;о 1Р.чка свободного конвейера пли его остановом после пуска сопровождаются временным промежуточным накоплением подходящих к блокирующему движению конвейера грузов в
следующем порядке. Если, например, пуск коивейера п блокирован в процессе работы соответствующих механизмов для передачи груза с одной липни иа .фугую, то в случае перемеи1ения груза конвейером п- пода(СИ спгиала е выхода датчика 4п- -1 на вход 1 блока 2п управления выхолной сигпал последнего в цротпвополо/кность расемотренному вьине нронессу пос.че.1овател1)ного автономного иеремещения груза не
включает блок 1. электропривода.
Отсутствие сигпала сюратной о работе конвейер на входе 5 блока 2п -- управления исключает возможность ноявлепня будирующего сигпяла на другом входе
элемента fO ИЛИ.
При дсктпжепня грузом фиксированного ноло/кения, в котором датчик 3л---1 освобождается, нсчезяет па третьем входе элемента 10 ИЛИ, что прив(здит к пропаданию сигналя Я выходе блока 2/г -1 управ.1епия. Это )ызывает ()тк. ючепис 6:i()ка 1л-1 электропривода i оперативный останов нервого конвейера л 1 в режиме
временного промежуточпого пакопления грузов.
В порядке цротивоположном направлению транспортирования будет осуществляться автоматический оперативный останов и остальных конвейеров ио мере поступлснр1я и фиксации положения груза на каждом из них.
Таким образом, в процессе временного и промежуточного накопления грузов происходит максимальное уплотнение дискретного грузопотока без столкновения грузов на конвейере.
Несколько в другом порядке осуществляется временное промежуточное накопление грузов, если произошел аварийный останов конвейера, например, п+ в тот момент, когда груз взаимодействует с датчиком 3/1+1.
Сигнал с выхода датчика З/г- 1 подается через вход 3 блока 2п упраплозия конвейера п па запрещающий вход эдсмопта 11 «Запрет.
Если следом перемещающийся на конвейере п груз взаимодейетвует хотя бы с одним из датчиков Зп или 4л сигпа.л с выхода элемента 11 «Запрет не подается на один из входов элемента 10 ИЛИ. При отсутствии сигнала на втором входе элемента 10 ИЛИ и исчезновении ностунающего через вход 5 (и элемент 13 «Запрет (в блоке 2п сигнала на третьем поопадяст cnrFia.T на выходе элемента 10 ИЛИ, входе и выходе элемента 7 И, что вызывает немедленное отключение блока In электропривода и оетанов конвейера без позиционирования груза для избежания его столкновения с остановивн1имся грузом.
Если в момент аварии конвейера п+1 конвейер п был свободен, для большей гарантии сохрар1ности груза исключается передача его па свободный конвейер п. Ирекран1ени5 действия сигнала с выхода элемента 6 НЕ на Б 51ходе элемента 11 «Запрет при наличии на запрещающем входе последпего сигнала с выхода датчика Зя+1 делает невозможным появление сигнала на выходе блока 2п управления для включения блока In электропривода.
Отсутствие обратной связи о пуске конвейера вызывает автоматический оперативный останов конвейера п-1 с фиксацией груза на нем перед свободным конвейером п.
В случае необходимости прохождения груза по приоритету через занятые иеремеп|,еппем унлотнеппого грузопотока конвейер транспортного узла производится командный останов конвейера п-1 с фиксацией груза на нем.
Сигнал для разделения грузопотока и освобождення конвейера п подается на вход блока --1 управления конвейера п-1 п вход 1G блока 2п управлення конвейера п.
Хвостовая часть грузопотока останавливается в режиме временного нромеж точного пакоплення грузов, а велед уходящей головке на освободивщийся конвейер п направляется груз (ы) с примыкающей транспортной линии.
Сигнал временного приоритета с учетом транспортной ситуации устанавливается вручную или автоматически от специального нрограмного устройства или ЭВМ, а постоянного - от элементов известной односторонней блокировки.
В процессе работы соответствующих механизмов для неревода груза па (через) конвейер пуск последнего блокируется.
После прохождения груза (ов) по приоритету последовательпым пуском конвейеров возобновляется движение хвостовой части грузопотока в установленном направлении.
Устройство без изменения внутрнблочпой структуры и межблочных связей может быть непользова1ю в условиях развития конвейерных систем и обеспечивает автоматическое управление приемом, передачей. накоплением, распределением, сбором, адреепьпг перемещением и выдачей несинхронно перемеш.ающнхся грузов, повышает производительность, уменьшает габариты и вес, упрощает конструкцню и повышает ее
ня.хежность, снижает стоимость изготовления и эксплуатации.
Формула изобретения
1. Устройство .для управления конвейерной системой, содержащее блоки электропривода конвейерами, связанные с выходами соответствующих блоков управления п с нервьтми входами блоков управления предыдущих по направлению движения грузов конвейеров, включающими два элемента ИЛИ, элемент И и элемент «Запрет, причем выход одного из элементов ИЛИ соединен с входом элемента «Запрет, датчики наличия груза на выходных концах конвейеров, подключенные к вторым входам соответствующих блоков управления н к третьим входам блоков управления последующих но направлению движения грузов
конвейеров, отличающееся тем, что, с целью расширения функциональных возможностей и экономии электроэнергии, оно снабжено датчиками наличия груза на входных концах конвейеров, нодключенпыми к четвертым входам соответствующих блоков управления и к пятых входам блоков управления предыдущих по направленню движения грузов конвейеров.
2. Устройство по н. 1, отличающееся
тем, что блок управления каждого конвейера снабжен третьим элементом ИЛИ и элементом НЕ, выход которого сое.дннен с первым входом первого .элемента ИЛИ, а выход элемента «Занрет подключен к первому входу второго элемента ИЛИ, выход которого н выход третьего элемента ИЛИ подключены к входам элемента И. выход которого является выходом блока управления, а вторым входы первого и второго
элементов ИЛИ, входы третьего элемента
11
ИЛИ и вход элемента ИН
являются вход: ми блока управления.
3.Устройство по пп. 1 п 2, отличающееся тем, что блок управления каждого конвейера снабл ен вторым элементом «Запрет и вторым элементом И, первый вход которого соединен е выходом нервого элемента ИЛИ, а выходы второго элемента «Запрет п второго элемента li подKv ючeпы к второму и третьему входам второго элемента ИЛИ. при этом входы второго элемента «Запрет, второй и третиi i входы второго элемента И являются входами блока управления.
4.Уетройство по пи. 1 и 2, отличающееся тем, что блок управления каждого конвейера енабл ен вторым элементом «За12
11);т, которого подключен к одно.му пз входов третьего элемента ИЛИ, а входь являются входами блока управления.
о. Уетройство но ии. 1 и 3, отличаюiii г е с я тем, что блок управления каждого конвейера снабжен третьим элементом «-Запрет, выход которого подключен к третьему входу второго элемента ИЛИ, а являютея входами блока управления. Источники информации,
ирниятьк во винмание нри эксперти.зе
I. Авторское свидетельство
СССР ,N1 534398, кл. В 65G 43/08, 1974. СССР
Авторское
свидетельство
.М 570525, кл. В 65G 43/10, 1974. 3. Авторское свидетельство СССР ЛЬ 207274, кл. В fi5G 43/10, 1966.
| название | год | авторы | номер документа |
|---|---|---|---|
| Многодвигательный электропривод | 1988 |
|
SU1628177A2 |
| Устройство для управления пуском конвейерной линии | 1987 |
|
SU1502440A1 |
| Устройство для управления запуском конвейерной линии | 1974 |
|
SU570525A1 |
| Устройство для автоматического управления неразветвленной конвейерной линией | 1977 |
|
SU744441A2 |
| Устройство для управления распределительно-сборочным конвейером | 1977 |
|
SU737324A1 |
| УСТРОЙСТВО для ИСКРОБЕЗОПАСНОГО УПРАВЛЕНИЯ КОНВЕЙЕРОМ РАЗВЕТВЛЕННОЙ КОНВЕЙЕРНОЙ ЛИНИИ | 1969 |
|
SU248038A1 |
| Устройство дискретного управления режимом работы погрузочной машины с нагребными лапами | 1982 |
|
SU1068596A1 |
| МНОГОФУНКЦИОНАЛЬНОЕ УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ | 1966 |
|
SU186003A1 |
| Устройство для управления перегрузочной тележкой распределительного конвейера | 1985 |
|
SU1265123A1 |
| Устройство для управления вентильным электродвигателем | 1985 |
|
SU1302413A2 |
/
J
4 f,
f
Фиг 3
kh
LJ „ I j
Lih
r-i
Jn-t n-i
Jf nIfn
Фиг. 5
in-l 4/ - /,
