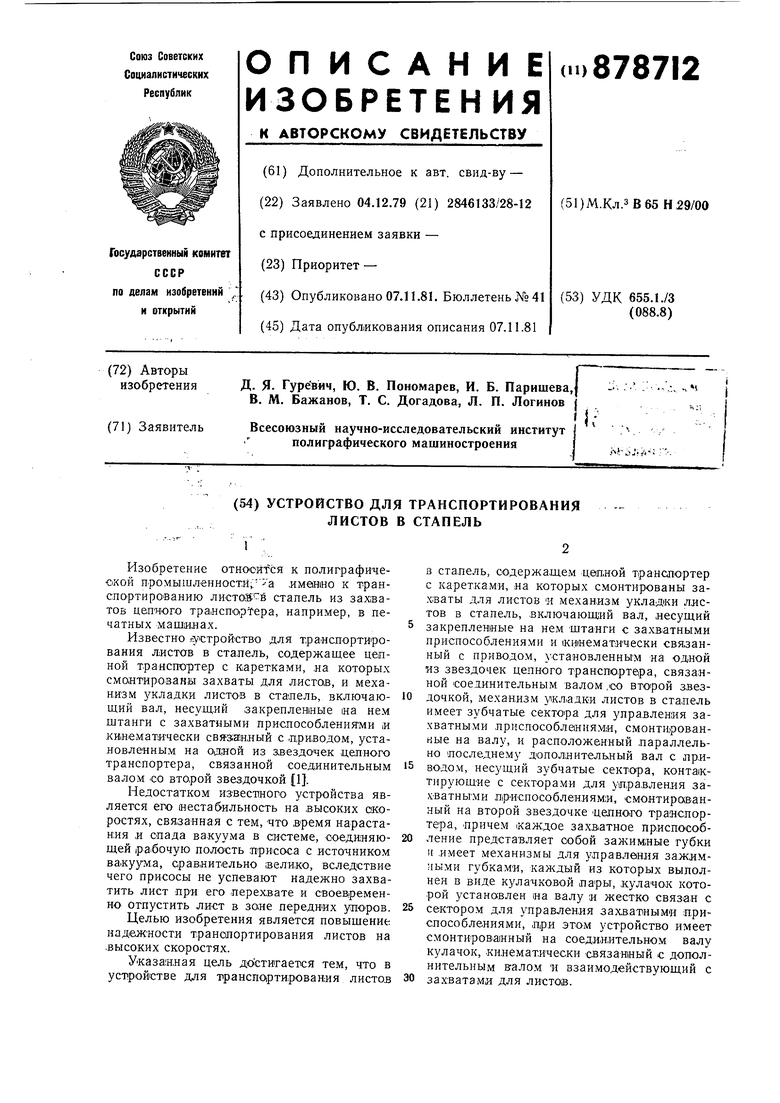
Предлагаемое устройство показано на чертеже.
Устройство состоит .из цепного траиспортера 1, на каретках 2 которого закреплены захваты 3, и мехаииама укладки листов в стапель 4, Образова-н;ный листами 5, выходящими к передним упорам 6 приемки, включающего вал 7 с закрепленными на нем штангамИ 8 и зубчатым сектором 9, находящимся :в зацеплении со Вторы.м зубчатым сектаром 10, смонтированным ,на одной из двух связанных соединительным валом 1.1 звездочек 12 цепного транспортера, и кинематически соединенным с .неподвижным кулачком 13; замыкание кулачковой пары мож.ет быть выполнено любым из известных способов, например, с помощью второго кулачка 14 и рычага 15, связанного с сектором 10 упругим элементом 16, на второй звездочке 17 цепного транспортера смонтирован дополнительный вал 18 и передаточный механизм, выполненный в виде рычага 19, жестко связанного с дополнительным валом 18 и взаимодействующего с неподвижным кулачком 20; замыкание кулачковой пары может быть выполнено, например, аналогично з амыканию кулачковой пары 10, 13 на дополяительном валу 18 закреплены зубчатые секторы 21, взаимодействующие с зубч атыми секторами для управления захвативши приспособлениями 22, жестко собдинен1ны,м;и с кулачками 23 и смонтированными на валу 7, на конце каждой .из штанг которого смонтировано захватное приспособление, включающее зажилмную губку 24, кинематически связанную с кулач-ко.м 23 .посредством передаточного механизма, например шарнирного четырехзвенника 24-25-26 с пружиной 27, обеспечивающей замыкание кулачковой пары 23-.26.
Для управления захватами 3 каретки 2 используется смонтированный на соединителыном валу кулачок 28, кинематически связанный, например, тягой 29 и рычагом 30 с дополнительным валом 18 и вз аимодействующий с роликом 31 рычага 32 .захватов каретки.
Устройство ра.ботает следующим обра.зом.
При движении приводимого от печатной машины цепного транспортера 1, каретки 2 своими захватами 3 транспо ртируют листы 5 .за переднюю кромку на.д приемным стапелем 4. При входе кареток 2 на радиусный участок траектории цепей, образованный закрепленными на соединительном валу 11 звездочками 12 ;и 17, происходит передача листа от каретки к штангам 8, закрепленным на валу 7, которые захватывают переднюю кромку диета с по.мощью зажимных губок 24, кинематически .соединенных с кулачками 23, например, с помо.щью тяги 25, рычага 26 и замыкающей пружины 27. В момент перехвата листа вал 7 со щтангами 8, управляющая его перемещением зубчатая .пара 9, 10 и за.мыкающая система, образованная, например, рычагом 15 .и пружиной 16, неподвижны относительно
звездочек 12, 17 и соединяющего их вала 11; эта неподвижность обеспечивается профилем приводного 13 и замыкающего 14 кулачков, неподвижных относительно стенок машины. Чтобы осуществить перемещение
зажимных губок 24 для захвата листа, производится .поворот кулачков 23 и неподвижно соединенных с ними зубчатых секторов 22 с помощью зубчатых секторов 21, жест.ко связанных с дополнительным валом 18,
.который ири ЭТО.М поворачивается рычагом 19, кинематически связанным с неподвижным кулачком 20; этим же .поворотом вала 18 через рычаг 30 и тягу 29 поворачивается кулачок 28, взаимодействующий с роликом
31 рычага 32, открывающего захваты каретки .после того, как штанга 8 с зажимами 24 приняли диет. После осуществления перехвата листа кулачком 13 через передаточный механиз.м 10--9 начинает поворачиваться вал 7 со штангами 8 в на.пр.авлениИ, прот.и.вополоЖ|Ном надра;влению вращения звездочек 12 .и 17, б.тагодаря чему осуществляется плавное замедление листа (вектор скорости движения листа является суммой
векторов пере нооной скорости цеп:И .и относительной скорости концов штанг .8).
При подходе л.иста 5 к .передним упорам 6 приемного стапеля 4 .рычаги 26, закрепленные на щтангах 8, поворачиваются кулачками 23, .и замкнутые губки 25 освобождают .переднюю |кро.мку листа 5, который вслед за этим опускается на стапель. В течение всего (или части) .времени движения листа со штангами 8 хвостовая часть листа
подторМаживается любым из известных способов зам.едления - неподвижным.и присосами, вакуумными лентами, роликами .и т. д.
После освобождения листа шта.нги 8 с валом 7 продолжают повор.ач.иваться до остановки (относительно звездочек 12, 17), а затем возвра.щаются в исходное положение для .пр.ие.ма следующего листа.
В предлагаемом устройстве транспортировка листа осуществляется штангами с механичеок ими зажимами, каждый из которых имеет .индивидуальный привод от дополнительного вала, который одновременно
управляет и захватам.и каретки, что позволяет ликвидировать отдельный механизм открыва.ния захватов каретки, требующий обычно трудоемкой регулировки в зависимости от скорости машины и характеристик
обрабатываемой бумаги, повысит надежность тр.анспортнрования листов на высоких скоростях.
Предлагаемое устройство позволяет увеличить icKopacTb работы листовых печатных ма.ши1Н на 25-30%.
Формула изобретелия
1. Устройство для транспортироваЯБЯ листов в стапель, содержащее цепной траиспо-pTeip с каретками, на кото,рых смонтированы захваты для листов, и механизм укладки листов в стапель, включающий вал, несущий закрепленные на нем штанги с захватными приспособлениями, и кинематически связанный с приводом, установленным на одной из звездочек цепного транспортера, связанной соедии.ительным валом со .второй звездочкой, отличающееся тем, что, с целью повышения надежности транспортИ|рования листов на высоких скоростях, механизм укладки листав в стапель имеет зубчатые сектора для улравлеиия захватными приспособлениями, смонтированные на валу, и расположенный параллельно последнему дополнительный вал с приводом, веауший зубчатые 1сектора, контактирующие с секторлми для управления замватными лрИСЛОсоблениями, смонтированный на Второй звездочке Цепного транспортера.
2.Устройство по п. 1, отл ич а ющеес я тем, что каждое захваттное приспособление представляет собой зажимные губки.
3.Устройство но н.п. 1 и 2, отличающее с я тем, что оно имеет механизмы для управления зажимными губками, каждый из которых выполнен в виде кулачковой пары, кулачок которой установлен на валу и жестко связан с сектором для упра1вления захватными приспособлениямИ.
4.Устройство по п.п. 1-3, отличающееся тем, что, с целью обеспечения управления захватами для листов, оно имеет смонтированный на соединительном валу кулачок, кинематически связанный с дополнительным валом и взаимодействующий с захватами для листов.
20
Источник информации, принятый во внимание при экспертизе:
1. Авторское свидетельство СССР № 642251, кл. В 65 Н 29/24, .1979.