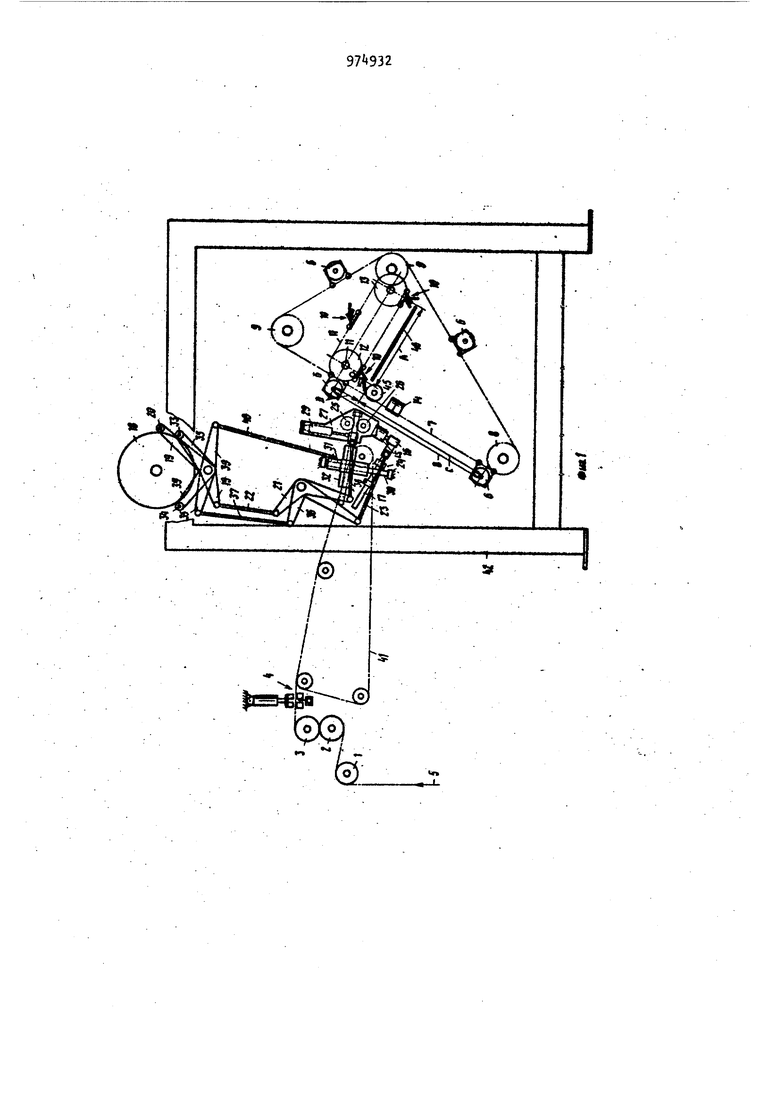
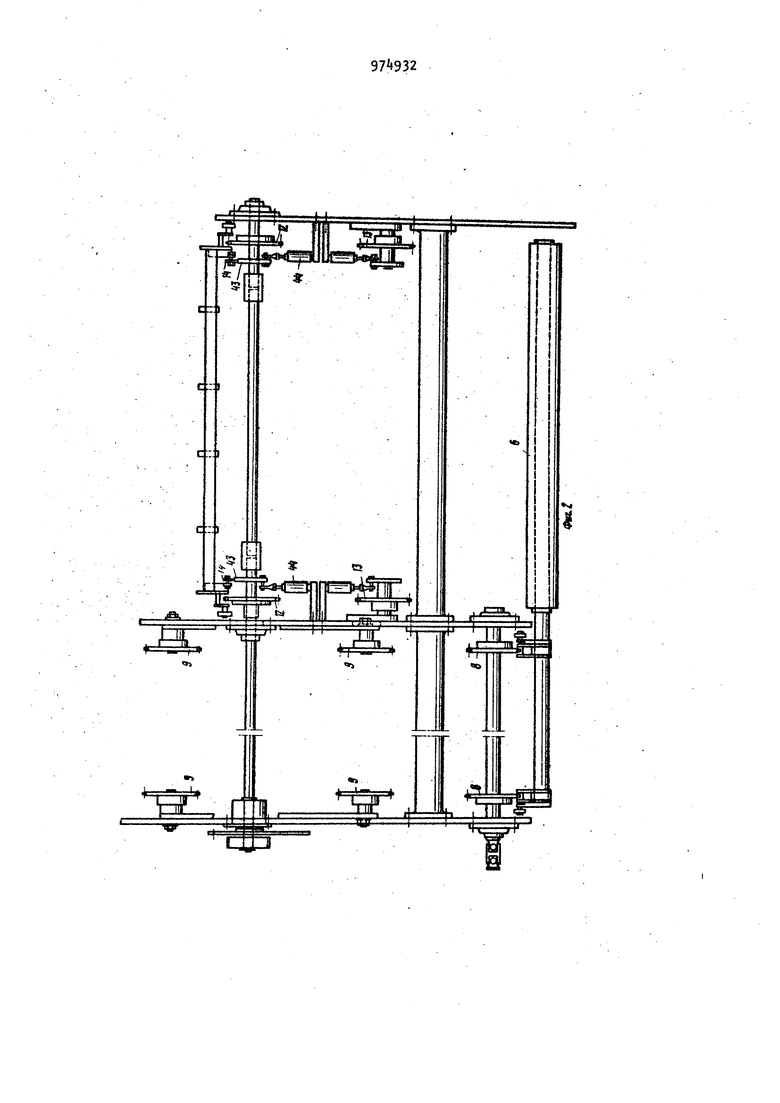
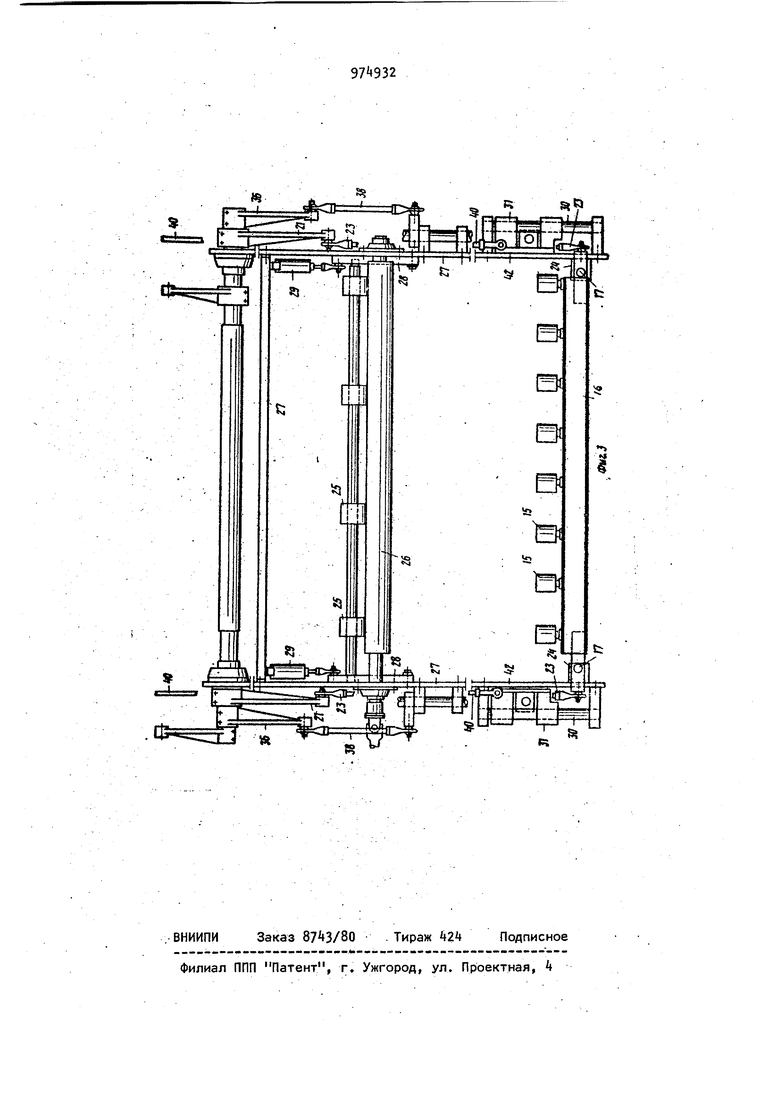
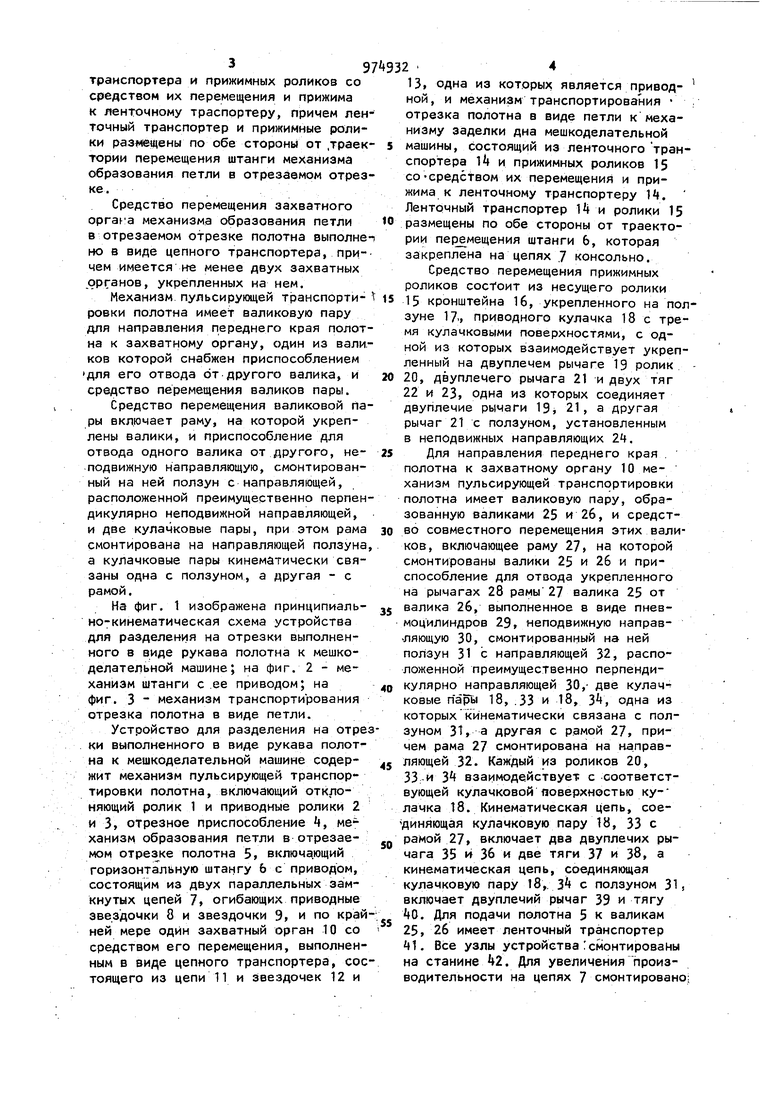
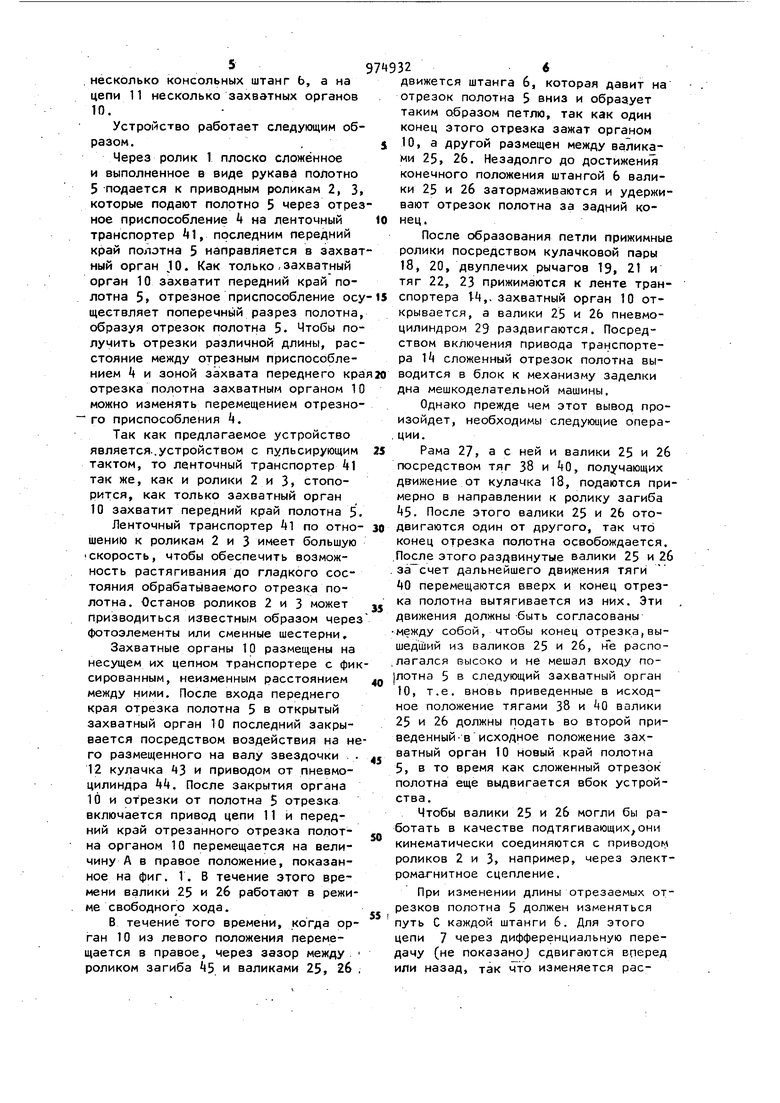
траиспортера и прижимных роликов со средством их перемещения и прижима к ленточному траспортеру, причем лен точный транспортер и прижимные ролики разтшены по обе стороны от ,траек тории перемещения штанги механизма образования петли в отрезаемом отрез ке. Средство перемещения захватного органа механизма образования петли в отрезаемом отрезке полотна выполне но в виде цепного транспортера, причем имеется ке менее двух захватных органов, укрепленных на нем. Механизм.пульсирующей транспортировки полотна имеет валиковую пару для направления переднего края полот на к захватному органу, один из вали ков которой снабжен приспособлением ДЛЯ его отвода от другого валика, и средство перемещения валиков пары. Средство перемещения валиковой Па ры включает раму, на которой укреплены валики, и приспособление для отвода одного валика от другого, неподвижную направляющую, смонтированный на ней ползун с направляющей, расположенной преимущественно перпен дикулярно неподвижной направляющей, и две кулачковые пары, при этом рама смонтирована на направляющей ползуна а кулачковые пары кинематически связаны одна с ползуном, а другая - с рамой. На фиг. 1 изображена принципиально-кинематическая схема устройства для разделения на отрезка выполненного в виде рукава полотна к мешкоделательной машине; на фиг. 2 - механизм штанги с .ее приводом; на фиг. 3 - механизм транспортирования отрезка полотна в виде петли. Устройство для разделения на отре ки выполненного в виде рукава полотна к мешкоделательной машине содержит механизм пульсирующей транспортировки полотна, включающий отклоняющий ролик 1 и приводные ролики 2 и 3, отрезное приспособление i, механизм образования петли в отрезаемом отрезке полотна 5, включающий горизонтальную штангу 6 с приводом, состоящим из двух параллельных замкнутых цепей 7, огибающих приводные звездочки 8 и звездочки 9, и по край ней мере один захватный орган 10 со средством его перемещения, выполненным в виде цепного транспортера, сос тоящего из цепи П и звездочек 12 и 13, одна из которых является приводной, и механизм транспортирования отрезка полотна в виде петли к механизму заделки дна мешкоделательной машины, состоящий из ленточного транспортера 1 И прижимных роликов 15 со-средством их перемещения и прижима к ленточному транспортеру 1. Ленточный транспортер 14 и ролики 15 размещены по обе стороны от траектории пере мещения штанги 6, которая закреплена на цепях 7 консольно. Средство перемещения прижимных роликов состоит из несущего ролики 15 кронштейна 16, укрепленного на ползуне 17., ПРИВОДНОГО кулачка 18 с тремя кулачковыми поверхностями, с одной из которых взаимодействует укрепленный на двуплечем рычаге 19 ролик 20, двуплечего рычага 21 и двух тяг 22 и 23, одна из которых соединяет двуплечие рычаги 19, 21, а другая рычаг 21 с ползуном, установленным в неподвижных направляющих 2t. Для направления переднего края . полотна к захватному органу 10 механизм пульсирующей транспортировки полотна имеет валиковую пару, образованную валиками 25 и 26, и средство совместного перемещения этих валиков, включающее раму 27, на которой смонтированы валики 25 и 26 и приспособление для отоода укрепленного на рычагах 28 рамы 27 валика 25 от валика 26, выполненное в виде пневмоцилиндров 29, неподвижную направляющую 30, смонтированный на ней ползун 31 с направляющей 32, расположенной преимущественно перпендикулярно направляющей 30,- две кулачковые парь 18, .33 и 18, 3, одна из которых кинематически связана с ползуном 31, а другая с рамой 27, причем рама 27 смонтирована на направляющей 32. Каждый из роликов 20, 33:-и 3 взаимодействует с соответствующей кулачковой поверхностью кулачка 18. Кинематическая цепь, соединяющая кулачковую пару 18, 33 с рамой 27, включает два двуплечих рычага 35 и 36 и две тяги 37 и 38, а кинематическая цепь, соединяющая кулачковую пару 18,. З с ползуном 31s включает двуплечий рычаг 39 и тягу 40.Для подачи полотна 5 к валикам 25, 26 имеет ленточный транспортер 41.Все узлы устройства :смонтированы на станине 42. Для увеличения производительности на цепях 7 смонтировано; несколько консольных штанг Ь, а на цепи 11 несколько захватных органов 10. Устройство работает следующим образом.. Через ролик 1 плоско сложённое и выполненное в виде рукава полотно 5 подается к приводным роликам 2, 3, которые подают полотно 5 через отрез ное приспособление на ленточный транспортер «I, последним передний край полотна 5 направляется в захват ный орган JO. Как только .захватный орган 10 захватит передний край полотна 5, отрезное приспособление осу ществляет поперечный разрез полотна образуя отрезок полотна 5. Чтобы получить отрезки различной длины, расстояние между отрезным приспособлением и зоной захвата переднего кра отрезка полотна захватным органом 10 можно изменять перемещением отрезного приспособления Ц, Так как предлагаемое устройство является..устройством с пульсирующим тактом, то ленточный транспортер k так же, как и ролики 2 и 3 стопорится, как только захватный орган 10 захватит передний край полотна 5. Ленточный транспортер 1 по отношению к роликам 2 и 3 имеет большую скорость, чтобы обеспечить возможность растягивания до гладкого состояния обрабатываемого отрезка полотна . Останов роликов 2 и 3 может призводиться известным образом через фотоэлементы или сменные шестерни. Захватные органы 10 размещены на несущем их цепном транспортере с фик сированным, неизменным расстоянием между ними. После входа переднего края отрезка полотна 5 в открытый захватный орган 10 последний закрывается посредством воздействия на не го размещенного на валу звездочки . 12 кулачка ЦЗ и приводом от пневмоцилиндра kk. После закрытия органа 10 и отрезки от полотна 5 отрезка включается привод цепи 11 и передний край отрезанного отрезка полотна органом 10 перемещается на величину А в правое положение, показанное на фиг. 1. В течение этого времени валики 25 и 2б работают в режиме свободного хода. В течение того времени, когда орган 10 из левого положения перемещается в правое, через зазор между роликом загиба kS и валиками 25, 26 32 движется штанга 6, которая давит на отрезок полотна 5 вниз и образует таким образом петлю, так как один конец этого отрезка зажат органом 10, а другой размещен между валиками 25, 26. Незадолго до достижений конечного положения штангой 6 валики 25 и 26 затормаживаются и удерживают отрезок полотна за задний конец. После образования петли прижимные ролики посредством кулачковой пары 18, 20, двуплечих рычагов 19, 21 и тяг 22, 23 прижимаются к ленте транспортера l-i,. захватный орган 10 открывается, а валики 25 и 26 пневмоцилиндром 29 раздвигаются. Посредством включения привода транспортера I сложенный отрезок полотна выводится в блок к механизму заделки дна мешкоделательной машины, Однако прежде чем этот вывод произойдет, необходимы следуюи|ие операции. Рама 27, ас ней и валики 25 и 2б посредством тяг 38 и 0, получающих движение от кулачка 18, подаются примерно в направлении к ролику загиба 5. После этого валики 25 и 26 отодвигаются один от другого, так что конец отрезка полотна освобождается. После этого раздвинутые валики 25 и 2б замечет дальнейшего дви кения тяги tO перемещаются вверх и конец отрезка полотна вытягивается из них. Эти движения должны быть согласованы между собой, чтобы конец отрезка,вышедший из валиков 25 и 26, располегален высоко и не мешал входу по|лотна 5 в следующий захватный орган 10, т.е. вновь приведенные в исходное положение тягами 38 и (О валики 25 и 26 должны подать во второй приведенный- в исходное положение захватный орган 10 новый край полотна 5, в то время как сложенный отрезок полотна еще выдвигается вбок устройства. Чтобы валики 25 и 26 могли бы работать в качестве подтягивающих они кинематически соединяются с приводом роликов 2 и 3, например, через электромагнитное сцепление. При изменении длины отрезаемых отрезков полотна 5 должен изменяться путь С каждой штанги 6. Для этого цепи 7 через дифференциальную передачу (не noKaaaHoJ сдвигаются вперед или назад, так что изменяется рас797стояние D, которое представляет собо свободный ход каждой штанги 6, прежде чем она придет в соприкосновение с полотном 5. Требуемый для образования на мешкоделательной машине дна на отрезке полотна в виде рукава материал сложенного отрезка полотна 5 является той его частью, которая на фиг. 1 находится на опорной пластине 46. Если нужно получить дно различной ши рины, то требуется соответственно изменять длину этой части отрезка полотна. Это достигается тем, что захватный орган продвигается не на величину А из левого положения в пра вое. Для этого на привод цепи 11 наложен еще один привод, который подсоединен так, что исходное положеЦие захватного органа 10 всегда одно и то же, тогда как конечное положение является изменяемым. Предлагаемое изобретение обеспечивает упрощение конструкции. Формула изобретения 1. Устройство для разделения на отрезки выполненного в виде рукава полотна к мешкоделательной машине, содержащее механизм пульсирующей транспортировки полотна, отрезное приспособление, механизм образования петли в отрезаемом отрезке полот на, включающий горизонтальную штангу с приводом, и механизм транспортирования отрезка полотна в виде петли к механизму заделки дна мешкоделател ной машины, о т л и ч а ю щ е е с я тем, что, с целью упрощения koHCTpyK ции, механизм образования петли в от резаемом отрезке полотна имеет по крайней мере один захватный орган -50 средством его перемещения для и транспортирования передней кром ки отрезаемого отрезка полотна, расположенный за механизмом пульсируюЦей транспортировки полотна по ходу транспортировки полотна, а штанга закреплена на приводном органе ее привода консольно, при этом механизм транспортирования отрезка полотна в виде петли состоит из ленточного транспортера и прижимных роликов со средством их перемещения и прижима к ленточному транспортеру, причем ленточный транспортер и прижимные ролики размещены по обе стороны от траектории перемещения штанги механизма образования петли в отрезаемом отрезке. 2.Устройство по п. 1, отличающееся тем, что средство перемещения захватного органа механизма образования петли в отрезаемом отрезке полотна выполнено в виде цепного транспортера, причем имеется не менее двух захватных органов, укрепленных на нем. 3.Устройство по пп, Г и 2, о тли чающееся тем, что механизм пульсирующей транспортировки полотна имеет валиковую пару для направления переднего края полотна к захватному органу, один из валиков которой снабжен приспособлением для его отвода от другого валика,и средство перемещения валиков пары. 4.Устройство по пп. 1-3, отличающееся тем, что средство перемещения валиковой пары включает раму, на которой укреплены валики, и приспособление для отвода одного валика от дру|ого, неподвижную направляющую, смонтированный на ней ползун с направляющей, расположенной преимущественно перпендикулярно неподвижной направляющей, и две кулачковые пары, при этом рама смонтирована на направляющей ползуна, а кулачковые пары кинематически связаны одна с ползуном, а другая - с рамой. Источники информации, принятые во внимание при экспертизе 1. Патент ФРГ fP , кл. 39 а 24/00, 197 (прототип).
9
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для укладки отрезков полотна на плоскую заготовку | 1979 |
|
SU942578A3 |
| Установка для формирования настилов полотен эластичного материала | 1982 |
|
SU1079577A1 |
| УСТРОЙСТВО для стыковки и РАСКРОЯ ОБРЕЗИНЕННОГО ПОЛОТНА | 1970 |
|
SU286208A1 |
| Линия для производства строительного кирпича | 1990 |
|
SU1768398A1 |
| Автомат для упаковки катушек с нитками в пачки | 1958 |
|
SU118015A1 |
| Устройство для проводки полотна ротационной машины глубокой печати | 1977 |
|
SU932972A3 |
| Устройство для раскроя эластичного материала на заготовки | 1987 |
|
SU1482813A1 |
| Устройство для бескопирного нанесения эллипсных линий на плоские заготовки | 1977 |
|
SU742397A1 |
| ЛЕНТОЧНО-ОТРЕЗНОЙ СТАНОК___.4,J | 1971 |
|
SU308823A1 |
| УСТРОЙСТВО ДЛЯ НАНЕСЕНИЯ ШНУРА-НАПОЛНИТЕЛЯ НА БОРТОВОЕ КОЛЬЦО ШИНЫ И СПОСОБ НАНЕСЕНИЯ ШНУРА-НАПОЛНИТЕЛЯ | 1997 |
|
RU2177879C2 |