(54) УСТРОЙСТВО КОНТРОЛЯ СИГНАЛА
.1..; .
Изобретение относится к радиотехнике и может использоваться в системах автома- , тического регулирования технологических, процессов для контроля сигналов.
Известно устройство контроля сигиала, содержащее измеритель, выход которого подключей к первому входу первого элемента сравнения, второй вход которого соединен с выходом моделирующего блока, выход первого элемента сравнения подключен к входу порогового элемента 1.
Однако известное устройство имеет не- to достаточную точность контроля и иевысокое . быстродействие.
Цель изобретения - повышение точности Н быстродействия контроля.
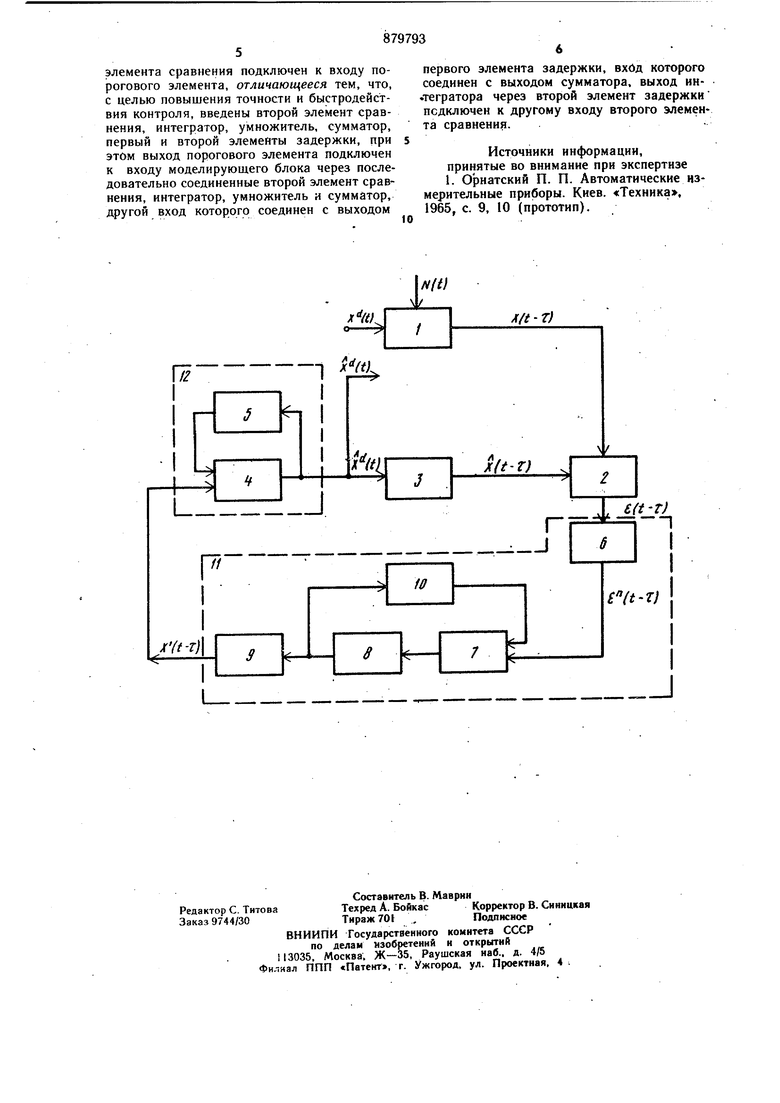
Для этого в устройство контроля сигнала, содержащее измеритель, выход которого 5 подключен к первому зходу первого элемента сравнения, второй вход которого соедиг иен с выходом моделирующего блока, выход первого элемента сравнения подключен к входу порогового элемента, введены вто-v рой элемент сравнения, интегратор, умно- житель, сумматор, первый и второй элементы задержки, при этом выход порогового элемента подключен к входу моделирукмего блока через последовательно соединенные второй элемент сравнения, интегратор, умиожитель, и сумматор, другой вход которого соединен с выходом первого элемента задержки, вход которого соединен с выходом сумматора, выход интегратора через второй элемент задержки подключен к другому входу второго элемента сравнения.
На чертеже приведена структурнаяэлектрическая схема предложен когоустройства.
Устройство контроля сигнала содержит измеритель 1, первый элемент 2 сравнения, моделирующий блок 3, сумматор 4, первый элемент 5 задержки, пороговый элемент 6, второй элемент 7 сравнения, интегратор 8, умножитель 9 и второй элемент 10 задержки
Устройство работает следующим образом Подлежащий контролю сигнал х измеряется измерителем I и дискретные моменты t с запаздыванием Т. Этот сигнал, зашумленный помехой, .подается на новый элемент 2 сравиеиия. где из него вычитается оценка этого же сигнала.полученная в моделирующем блоке Э.. Сигнал с выхода первого элемента 2 сравнения. e(t-T ) x(t-r)$(i-r ) подается на вход корректора 11 параметров модели воспроизведения сигнала, который образован пороговым элементом б, вторым элементом 7 сравнения, интегратором 8, вторым элементом 10 задержки и умножителем 9: Функционирование этого корректора II параметров модели воспроизведения сигналов можно описать выражениями. 1 при E(t-т) О (t--T) -1 при (t-г)0 jc(t-T) к- 6(t--r( ) (t-г- 1) .(i-r) - i),(A) гдеК 0,2; i- 0,5 - настроечные коэффициенты, уточняемые в ходе эксплуатации устройства; f(t-t -выходной сигнал порогового элемента; уft-т)-выходной сигнал корректора 11 параметров модели воспроизведения сигнала; (-t-г)-сглаженное значение сигнала (t-t). На выходе порогового элемента 6 сигнал имеет значение -f 1 или -I, что позволяет, с одной стороны, устранить влияние эпизодической помехи NZ, возникающей, например, в связи со сбоями в измерительной аппаратуре, и, с другой стороны, оперативно реагировать на отклонение модельного сигнала X от измеряемого сигнала х. Из формул (I) - (4) видно, что если измеряемый сигнал х и модельный сигнал, х не имеют систематических отклонений, т.е . X - знакопеременная величина, то корректировка х близка к нулю за счет сглаживания ; если же наблюдается систематическое отклонение х от х, то величина корректировки увеличивается. Сигнал через пороговый элемент 6 поступает на первый вход второго элемента 7 сравнения, на второй вход которого поступает сигнал с выхода второго элемента 10 задержки. Получаемый во втором элементе 7 сравнения сигнал Д ( «(t -1)-А (t-TM) (5) поступает через интегратор 8 на вход второго элемента 10 задержки и вход умножителя 9, в котором он умножается на постоянный коэффициент. С выхода умножителя 9 сигнал Vft-t,) идет на вход модели 12 воспроизведения сигнала, образованной сумматором 4 и первым элементом 5 задержки, функция которого в частном случае представлена линейной зависимостью, имеющей в рекуррентной форме следующий вид: ilt) - л:(1-1) + x(i),(6) гдех Й) и оценка сигнала х в текущий ( и предшествующий моменты времени; 5c(t) - скорость изменения сигналов, утвчняется с помощью корректора 11. Сигнал х ( ) поступает на первый вход сумматора 4, на, второй вход которого поступает сигнал с выхода первого элемента 5 задержки. Выходной сигнал сумматора (t) х (t-1) + - t} подается на вход первого элемента 5 задержки и на вход моделирующего блока 3 и является выходным сигналом устройства. Таким образом, использование модели 12 воспроизведения сигнала, корректора 11 параметров, моделирующего блока и элемента 2 сравнения позволяет обойтись без обратной модели измерителя, усиливающей высокочастотную помеху, и уменьшить запаздывание при контроле состояния объекта за счет соответствующей модели воспроизведения сигнала. Технико-экономическая эффективность от использования предложенного устройства заключается в том, что повышается точность контроля сигнала и обеспечивается его своевременность. Исследование предложенного устройства проведено на модельном примере при следующих условиях: время инерции измерителя - 3с, время транспортного запаздывания - 2 с, коэффициент передачи - 1. Оценка точности контроля сигнала по среднемодульному критерию Q I. lx(i}-xd({)l, t--i где Т - число учитываемых точек измерения. Показывает, что точность контроля сигнала предложенным устройством в четыре раза выше, чем известным устройством: QI 0,40; Ог 0,10. Формула изобретения Устройство контроля сигнала, содержащее измеритель, выход которого подключен к первому входу первого элемента сравнения, второй вход которого соединен с выходом моделирующего блока, выход первого
элемента сравнения подключен к входу порогового элемента, отличающееся тем, что, с целью повышения точности и быстродействия контроля, введены второй элемент сравнення, интегратор, умножитель, сумматор, первый и второй элементы задержки, при этбм выход порогового элемента подключен к входу моделирующего блока через последовательно соединенные второй элемент сравнения, интегратор, умножитель и сумматор, другой вход которого соединен с выходом
первого элемента задержки, вхОд которого соединен с выходом сумматора, выход ин.тегратора через второй элемент задержки подключен к другому входу второго элемента сравнения.
Источники информации, принятые во внимание при экспертизе 1. Орнатский П. П. Автоматические измерительные приборы. Киев. «Техника, 1965, с. 9, 10 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Регулятор | 1989 |
|
SU1789969A1 |
| Регулятор | 1980 |
|
SU855607A1 |
| Самонастраивающаяся система для регулирования объектов с запаздыванием | 1984 |
|
SU1236422A1 |
| Устройство для контроля сигналов | 1987 |
|
SU1401622A2 |
| Система управления | 1985 |
|
SU1285430A1 |
| Адаптивный регулятор | 1984 |
|
SU1149215A1 |
| СЛЕДЯЩАЯ СИСТЕМА УПРАВЛЕНИЯ ДЛЯ АПРИОРНО-НЕОПРЕДЕЛЕННЫХ ОБЪЕКТОВ С ЗАПАЗДЫВАНИЕМ ПО УПРАВЛЕНИЮ | 2011 |
|
RU2449337C1 |
| Регулятор | 1980 |
|
SU907511A1 |
| Устройство для контроля и управления насосной установкой гидротранспортной системы | 1980 |
|
SU882895A2 |
| Устройство для согласования производительности технологических участков | 1982 |
|
SU1100607A1 |
/Г// - г; г- 1Д-Ц f ft-T)
