(54) РУКА ПРОМЫШЛЕННОГО РОБОТА
| название | год | авторы | номер документа |
|---|---|---|---|
| Рука промышленного робота | 1987 |
|
SU1542794A1 |
| Рука циклового робота | 1976 |
|
SU595143A1 |
| Промышленный робот | 1979 |
|
SU863330A1 |
| Манипулятор | 1984 |
|
SU1202861A1 |
| Рука промышленного робота | 1979 |
|
SU837848A1 |
| Промышленный робот | 1979 |
|
SU908242A3 |
| Промышленный робот | 1974 |
|
SU503712A1 |
| Промышленный робот | 1983 |
|
SU1127765A1 |
| Промышленный робот | 1986 |
|
SU1368166A1 |
| Устройство для подачи заготовок | 1985 |
|
SU1296368A1 |
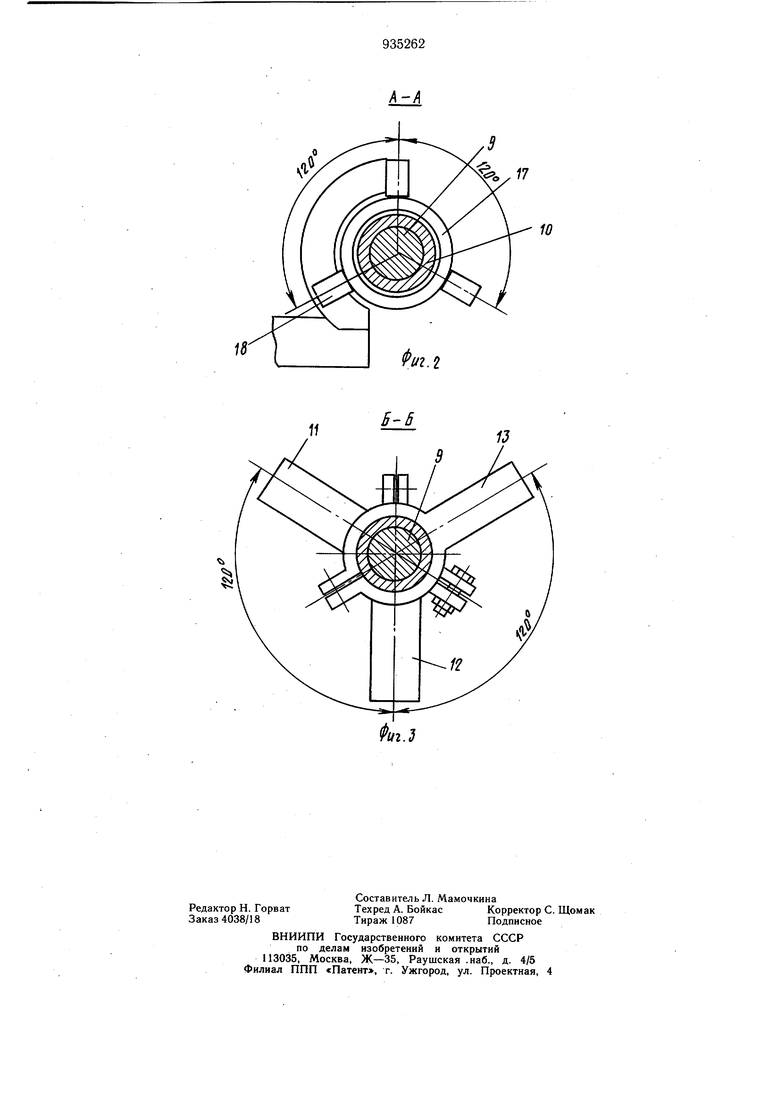
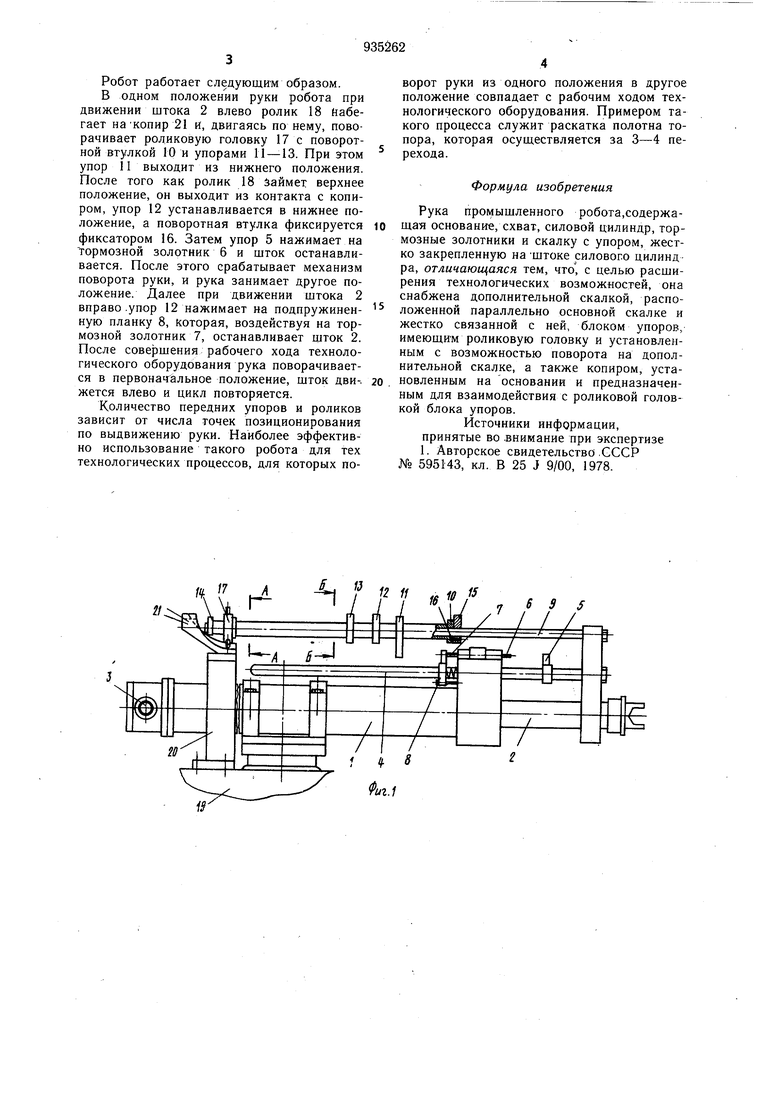
Изобретение относится к машиностроению, в частности к промышленным роботам с цикловой системой управления и предназначено для захвата и ориентации деталей относительно технологического оборудова-. ния, а также для их транспортировки в различные точки обслуживаемого пространства. Известна рука промышленного робота, содержащая основание, схват, силовой цилиндр, тормозные золотники и скалку с упором, жестко закрепленную на штоке силового цилиндра 1. Недостаточное количество упоров ограничивает технологические возможности работы. Целью изобретения является расширение технологических возможностей работы путем увеличения числа точек позиционирования при выдвижении руки. Поставленная цель достигается тем, что рука снабжена дополнительной скалкой, расположенной параллельно основной скалке и жестко связана с ней блоком упоров, имеющим роликовую головку и установленным с возможностью поворота на дополнительной скалке, и копиром, установленным на основании и предназначенным для взаимодействия с роликовой головкой блока упоров. На фиг. 1 изображена рука робота, общий вид; на фиг. 2 - сечение А-А на фиг. 1; на фиг. 3 - сечение Б-Б на фиг. 1. Рука робота содержит силовой цилиндр Iсо штоком 2, цилиндр 3 механизма поворота кисти с тормозными золотниками, скалку 4 с установленным на ней регулируемым упором 5, тормозные золо-тники механизма выдвижения рукн 6 и 7, подпружиненную планку 8, свободно перемещающуюся по скалке 4. На руке установлена -дополнительная скалка 9, жестко закрепленная со штоком силового цилиндра I, накоторой установлена поворотная втулка 10. На втулке 10 закреплены передние регулируемые упоры II-13. От продольного перемещения поворотную втулку 10 предохраняют ограничители 14, 15 и фиксирует ее положение фиксатор 16. На втулке 10 установлена роликовая головка 17 с роликами 18. На основании 19 робота с помощью кронштейна 20 закреплен копир 21.
Робот работает следующим образом.
В одном положении руки робота при движении штока 2 влево ролик 18 Набегает накопир 21 и, двигаясь по нему, поворачивает роликовую головку 17 с поворотной втулкой 10 и упорами . При этом упор 11 выходит из нижнего положения. После того как ролик 18 Займет верхнее положение, он выходит из контакта с копиром, упор 12 устанавливается в нижнее положение, а поворотная втулка фиксируется фиксатором 16. Затем упор 5 нажимает на тормозной золотник 6 и шток останавливается. После этого срабатывает механизм поворота руки, и рука занимает другое положение. Далее при движении штока 2 вправо .упор 12 нажимает на подпружиненную планку 8, Которая, воздействуя на тормозной золотник 7, останавливает шток 2. После сове эшения рабочего хода технологического оборудования рука поворачивается в первоначальное положение, шток дви-. жется влево и цикл повторяется.
Количество передних упоров и роликов зависит от числа точек позиционирования по выдвижению руки. Наиболее эффективно использование такого робота для тех технологических процессов, для которых по С. i-i
ворот руки из одного положения в другое положение совпадает с рабочим ходом технологического оборудования. Примером такого процесса служит раскатка полотна топора, которая осуш,ествляется за 3-4 перехода.
Формула изобретения
Рука промышленного робота,содержашая основание, схват, силовой цилиндр,тормозные золотники и скалку с упором, жестко закрепленную на штоке силового цилиндра, отличающаяся тем, что , с целью расширения технологических возможностей, она снабжена дополнительной скалкой, расположенной параллельно основной скалке и жестко связанной с ней, блоком упоров, имеющим роликовую головку и установленным с возможностью поворота на дополнительной скалке, а также копиром, установленным на основании и предназначенным для взаимодействия с роликовой головкой блока упоров.
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство .СССР № 595143, кл. В 25 J 9/00, 1978. f п6 3 f /II/
10
