Изобретение относится к обработке металлов давлением, в частности к устройствам автоматизации загрузки и выгрузки деталями основного технологического оборудования штамповочного производства, и может быть использовано для точного позиционирования захватных органов промышленного робота.
Наиболее близким к предлагаемому по совокупности суш,ественных признаков и достигаемому эффекту является механизм позиционирования робота, содержаший подвижную колонну, кинематически связанный с ней вал, служащий для перемещения руки робота и несущий барабан с регулируемыми упорами, установленными с возможностью взаимодействия с колонной 1.
Однако этот механизм характеризуется ограниченностью диапазона регулируемого угла поворота и недостаточной точностью позиционирования.
Цель изобретения - расширение технологических возможностей за счет расщирения диапазона изменения угла поворота и повышение точности позиционирования.
Поставленная цель достигается тем, что в механизме позиционирования робота, содержащем колонну, кинематически связанный с ней вал, служащий для перемещения руки робота и несущий барабан с регулируемыми упорами, установленными с возможностью взаимодействия с колонной, на наружной поверхности барабана выполнена резьба, механизм снабжен резьбовой втулкой, охватывающей барабан, на резьбовой втулке выполнен кольцевой паз и регулируемые упоры размещены в нем.
Кроме того, кольцевой паз расположен на одном из торцов резьбовой втулки, а его сечение выполнено в форме ласточкина хвоста.
Механизм снабжен лимбом, размещенным на торце резьбовой втулки, выполненном с кольцевым пазом.
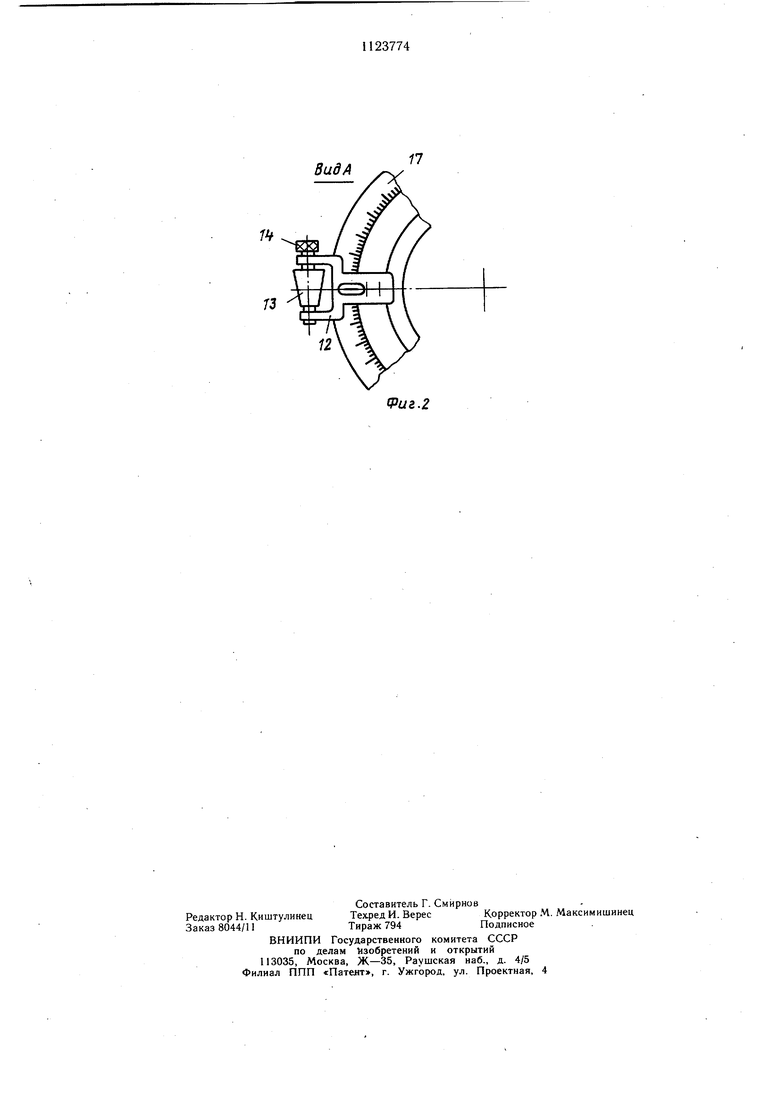
На фиг. 1 изображен механизм позиционирования робота; на фиг. 2 - вид А на фиг. 1.
Механизм позиционирования робота содержит поворотную колонну 1, установленнуь на стойке 2, которая через зубчатые колеса 3 и 4 (передаточное число равно I) связана с валом 5, на котором установлен барабан 6 с помощью шпонки 7 и пружины 8 возврата. На валу 5 устанавливается рука робот; (не показана). На наружной поверхнигти барабана 6 нарезана резьба.
на которую навинчивается резьбовая втулка 9 с контргайкой 10. На торце резьбовой втулки 9 выполнен кольцевой паз 11 в форме ласточкина хвоста. В кольцевом пазу 11 установлены регулируемые упоры 12, содержащие конический ролик 13, который .можно перемещать вдоль продольной оси вращением рукоятки 14. Фланец барабана 6 контактирует с плунжером 15 тормозного золотника 16. Для точной установки упоров 12 на торце резьбовой втулки 9 закреплен лимб 17 с градусными делениями.
Механизм позиционирования робота работает следующим образом.
Поворотом колонны 1 (привод поворота не показан) вращают стойку 2 и через зубчатые колеса 3 и 4, вал 5, шпонку 7 вращение передается барабану 6. Вращение барабана происходит до тех пор, пока конический ролик 13 не зацепит буртик колонны 1. Под действием конического ролика 13
0 резьбовая втулка 9 и барабан 6 преодолевают усилие пружины 8 и перемещаются вниз. Фланец барабана б, взаимодействуя с плунжером 15 тормозного золотника 16, осуществляет плавное торможение колонны и тем самым - точное угловое перемещение.
Ход барабана 6 ограничен осевым расстоянием между его фланцем и выступом на зубчатом колесе 4. После выполнения роботом требуемой операции подвижная
колонна 1 вновь поворачивается или перемещается в вертикальном направлении, пока не зацепит следующий упор 12 (их может быть установлено несколько). После окончания цикла работа робота прекращается от конечного выключателя (не показан).
При движении колонны 1 барабан 6
под действием пружины 8 возвращается в исходное положение.
Для дискретности установки упоров 12 по окружности их перемещают по кольце ° У зу 11 до необходимого деления на лимбе 17. Координирующая поправка установки упора 12 возможна вращением рукоятки 14 и выдвижением конического ролика 3.
Дискретность установки упоров 12 по
вертикали достигается вращением резьбовой втулки 9, которая фиксируется контргайкой 10.
Предлагаемый механизм расширяет технологические возможности робота за счет
расширения диапазона изменения угла поворота и обеспечивает повышение точности позиционирования.
ВидА
fPuz.2
| название | год | авторы | номер документа |
|---|---|---|---|
| Промышленный робот | 1984 |
|
SU1299676A1 |
| Устройство для ротационного выдавливания | 1983 |
|
SU1100027A1 |
| Механизм поворота промышленного робота | 1983 |
|
SU1119839A1 |
| Промышленный робот | 1983 |
|
SU1127765A1 |
| Металлорежущий станок с ЧПУ | 1983 |
|
SU1138261A1 |
| Привод поворота исполнительного органа промышленного робота | 1983 |
|
SU1189551A1 |
| УСТРОЙСТВО ДЛЯ ФОРМОВАНИЯ БЕТОННЫХ ИЗДЕЛИЙ | 2009 |
|
RU2405672C1 |
| Механизм поворота руки промышленного робота | 1982 |
|
SU1060464A1 |
| Промышленный робот | 1980 |
|
SU880713A1 |
| Установка для изготовления витого магнитопровода электрической машины | 1989 |
|
SU1695453A1 |
1. МЕХАНИЗМ ПОЗИЦИОНИРОВАНИЯ РОБОТА, содержащий подвижную колонку, кинематически связанный с ней вал, служащий для перемещения руки робота и несущий барабан с регулируемыми упорами, установленными с возможностью взаимодействия с колонной, отличающийся тем, что, с целью расширения технологических возможностей за счет расщирения диапазона изменения угла поворота и повышения точности позиционирования, на наружной поверхности, барабана выполнена резьба, механизм снабжен резьбовой втулкой, охватывающей барабан, на резьбовой втулке выполнен кольцевой паз и регулируемые упоры размещены в нем. 2.Механизм по п. 1, отличающийся тем, что кольцевой паз расположен на одном из торцов резьбовой втулки, а его сечение выполнено в форме ласточкина хвоста. 3.Механизм по п. 1, отличающийся тем, что он снабжен лимбом, размешенным на I торце резьбовой втулки, выполненном с кольцевым пазом. (Л го оо J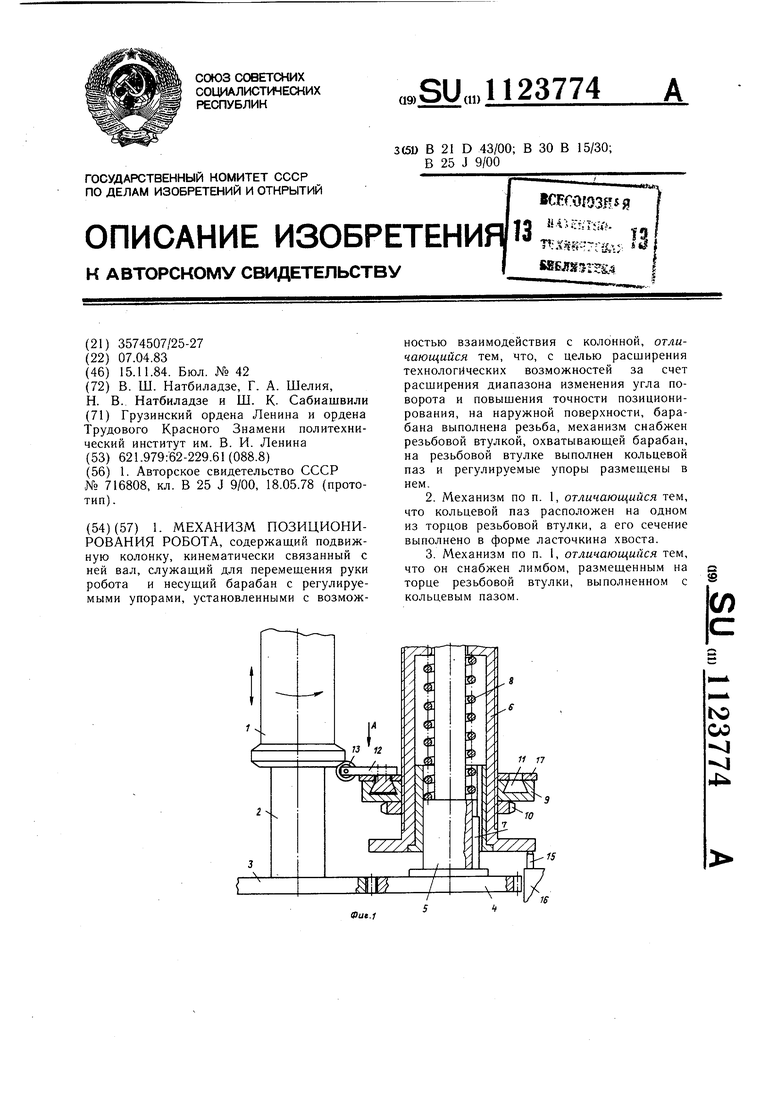
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Механизм позиционирования робота | 1978 |
|
SU716808A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
