Изобретение относится к области автоматизации рабочих процессов землеройно-транспортных машин (ЗТМ), а именно к устройствам для автоматического управления рабочим органом ЗТМ в режиме максимума производительности.
Известно устройство для автоматического управления рабочим органом ЗТМ, основанное на поиске экстремума тяговой мощности и содержащее измерительные блоки действительной скорости движения и силы тяги машины, умножителя измеряемых величин скорости и силы тяги, выделяющего сигнал, пропорциональный тяговой мощности колесного движителя, блоков определения знака производной тяговой мощности и силы тяги, формирующих сигнал «Плюс», «Минус», «Равно нулю», трехпозиционного релейного элемента с выходными каскадами выглубления и заглубления (Авторское свидетельство СССР №881225, кл. Е 02 F 9/20, 1981).
Существенным недостатком устройства является управление по косвенному параметру, что приводит к режиму работы не на максимуме производительности, а лишь вблизи максимума тяговой мощности ЗТМ.
Наиболее близким по совокупности признаков является система автоматического управления рабочим органом, содержащая датчик действительной скорости движения машины, датчик объема грунта перед рабочим органом, задатчик опорных сигналов, управляющий блок, включающий в себя устройство ввода, однокристальный микроконтроллер, постоянное запоминающее устройство и устройство вывода, и исполнительный механизм, состоящий из электрозолотников и гидроцилиндров (Никулин Н.И., Тепляков И.М., Енин В.И., Кононов А.А. Повышение эффективности процесса копания грунта колесными землеройно-транспортными машинами // Известия ВУЗов: Строительство. - 1999. - №6. - С.105-107).
Достоинством системы является управление по прямому параметру - мгновенной производительности ЗТМ в процессе копания грунта. Однако при достаточно широком диапазоне изменения грунтовых условий, особенно влажности грунта, неизменный уровень опорных сигналов будет приводить к существенным погрешностям автоматического регулирования.
Предлагаемое изобретение предназначено для решения задачи автоматического управления рабочим органом ЗТМ в режиме максимума производительности с повышением точности управления.
Задача решается тем, что в известной системе автоматического управления рабочим органом ЗТМ, содержащей датчик действительной скорости движения машины, датчик объема грунта перед рабочим органом, задатчик опорных сигналов, управляющий блок, включающий в себя устройство ввода, однокристальный микроконтроллер, постоянное запоминающее устройство и устройство вывода, и исполнительный механизм, состоящий из электрозолотников и гидроцилиндров, отличительным признаком является то, что она снабжена датчиком физико-механических свойств грунта перед рабочим органом ЗТМ, причем выход датчика соединен с входом устройства ввода управляющего блока.
Получаемый при осуществлении изобретения технический результат, а именно автоматическое управление рабочим органом ЗТМ в режиме максимума производительности с повышением точности управления, достигается за счет того, что в системе используется поляризационный датчик физико-механических свойств грунта перед рабочим органом ЗТМ.
На чертеже изображена структурная схема системы автоматического управления рабочим органом ЗТМ.
Система автоматического управления рабочим органом ЗТМ состоит из датчика действительной скорости движения машины 1, подключенного к ведомому колесу 2, датчика объема грунта 3 и датчика физико-механических свойств грунта 4 перед рабочим органом ЗТМ 5, задатчика опорных сигналов 6, управляющего блока 7, содержащего устройство ввода 8, постоянное запоминающее устройство 9, к выходам которых подключен однокристальный микроконтроллер 10, присоединенный своим выходом к устройству вывода 11, и исполнительного механизма 12, включающего в себя электрозолотники 13, подключенные своим входом к устройству вывода 11, и гидроцилиндры 14, присоединенные входом к выходу электрозолотников и управляющие рабочим органом, причем выходы датчика действительной скорости 1, датчика физико-механических свойств грунта перед рабочим органом 4, датчика объема грунта 3 и задатчика опорных сигналов 6 подключены к входу устройства ввода, а однокристальный микроконтроллер 10 имеет обратную связь с устройством ввода 8, постоянным запоминающим устройством 9 и устройством вывода 11.
Система работает следующим образом. В качестве основных информационных параметров используются объем грунта перед рабочим органом V и действительная скорость движения машины vд в процессе копания грунта, значения которых снимаются с соответствующих датчиков. Произведение этих параметров, деленное на длину отвала, дает численное выражение производительности. В зависимости от разности между предыдущим и текущим значением производительности в данный момент времени вырабатывается сигнал на заглубление или выглубление рабочего органа.
Обязательным условием получения наибольшей возможной производительности является проведение работы при полной подаче топлива в двигатель.
С целью предотвращения возникновения нестандартных и аварийных ситуаций предусмотрена защита. Сущность ее заключается в том, что во время работы постоянно снимаемые показания датчиков действительной скорости движения машины и объема грунта перед отвалом сравниваются с заданными опорными значениями этих величин. Сигнал разрешения автоматического регулирования по параметру мгновенной производительности подается только при условии преобладания измеренных датчиками параметров над опорными сигналами. Если же одно из этих условий не выполняется, то исполнительный механизм получает команду на выглубление или заглубление рабочего органа. С целью повышения точности автоматического управления в системе используется поляризационный бесконтактный датчик физико-механических свойств грунта, информационный сигнал которого позволяет вносить оперативную корректировку в работу системы автоматического управления процессом копания грунта, полезную для уточнения уровня опорных сигналов при достаточно широком диапазоне изменения грунтовых условий. Так при значительном повышении влажности грунта специфика устройства радиоволнового датчика объема может привести к излишне раннему преобладанию измеренного информационного параметра над опорным сигналом, следовательно, в этом случае уровень опорного сигнала объема грунта должен быть скорректирован в сторону повышения.
В результате удается повысить точность автоматического управления рабочим органом землеройно-транспортной машины в режиме поиска максимума производительности.
В системе автоматического управления использован известный из уровня техники датчик физико-механических свойств грунта (Никулин П.И., Тепляков И.М., Кононов А.А. О возможности экспресс-определения влажности грунта поляризационным методом // Известия ВУЗов: Строительство. - 1998. - №1. - С.57-60).
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ РАБОЧИМ ОРГАНОМ ЗЕМЛЕРОЙНО-ТРАНСПОРТНОЙ МАШИНЫ В ПРОЦЕССЕ КОПАНИЯ ГРУНТА | 2006 |
|
RU2327010C2 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ РАБОЧИМ ОРГАНОМ АВТОГРЕЙДЕРА | 2006 |
|
RU2327011C2 |
| Система автономного управления дорожно-строительной машины | 2022 |
|
RU2794670C1 |
| СИСТЕМА УПРАВЛЕНИЯ РАБОЧИМ ОРГАНОМ ЗЕМЛЕРОЙНО-ТРАНСПОРТНОЙ МАШИНЫ | 2014 |
|
RU2572434C1 |
| Способ управления ковшом скрепера | 1987 |
|
SU1578278A1 |
| СПОСОБ УПРАВЛЕНИЯ ПРОЦЕССОМ КОПАНИЯ ГРУНТА ЗЕМЛЕРОЙНО-ТРАНСПОРТНОЙ МАШИНЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2232234C2 |
| Способ управления рабочим процессом бульдозера | 1985 |
|
SU1239233A1 |
| СИСТЕМА УПРАВЛЕНИЯ ЗЕМЛЕРОЙНО-ТРАНСПОРТНОЙ МАШИНЫ | 2013 |
|
RU2526437C1 |
| СПОСОБ УПРАВЛЕНИЯ РАБОЧИМ ОРГАНОМ ЗЕМЛЕРОЙНО-ТРАНСПОРТНОЙ МАШИНЫ | 1997 |
|
RU2131961C1 |
| Способ управления процессом копания | 1985 |
|
SU1307041A1 |
Изобретение относится к области автоматизации рабочих процессов землеройно-транспортных машин. Техническим результатом является повышение точности автоматического управления рабочим органом землеройно-транспортной машины. Для этого система содержит датчик действительной скорости движения машины, датчик объема грунта, датчик физико-механических свойств грунта перед рабочим органом землеройно-транспортной машины, задатчик опорных сигналов, управляющий блок, включающий в себя устройство ввода, постоянное запоминающее устройство, к выходам которых подключен однокристальный микроконтроллер, присоединенный своим выходом к устройству вывода, и исполнительный механизм, состоящий из электрозолотников, подключенных своим входом к устройству вывода, и гидроцилиндры, присоединенные входом к выходу электрозолотников и управляющие рабочим органом. Причем выходы датчика действительной скорости, датчика физико-механических свойств грунта перед рабочим органом, датчика объема грунта и задатчика опорных сигналов подключены к входу устройства ввода, а однокристальный микроконтроллер имеет обратную связь с устройством ввода, постоянным запоминающим устройством и устройством вывода. 1 ил.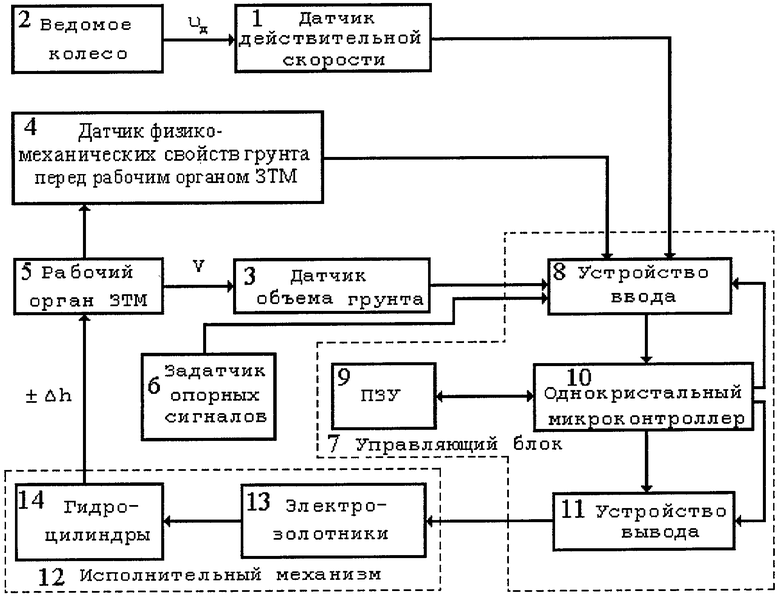
Система автоматического управления рабочим органом землеройно-транспортной машины, содержащая датчик действительной скорости движения машины, датчик объема грунта, задатчик опорных сигналов, управляющий блок, включающий в себя устройство ввода, постоянное запоминающее устройство, к выходам которых подключен однокристальный микроконтроллер, присоединенный своим выходом к устройству вывода, и исполнительный механизм, состоящий из электрозолотников, подключенных своим входом к устройству вывода, и гидроцилиндры, присоединенные входом к выходу электрозолотников и управляющие рабочим органом, отличающаяся тем, что она снабжена датчиком физико-механических свойств грунта перед рабочим органом землеройно-транспортной машины, причем выходы датчика действительной скорости, датчика физико-механических свойств грунта перед рабочим органом, датчика объема грунта и задатчика опорных сигналов подключены к входу устройства ввода, а однокристальный микроконтроллер имеет обратную связь с устройством ввода, постоянным запоминающим устройством и устройством вывода.
| НИКУЛИН П.И | |||
| и др | |||
| Повышение эффективности процесса копания грунта колесными землеройно-транспортными машинами | |||
| Известия ВУЗов | |||
| Строительство | |||
| Металлический водоудерживающий щит висячей системы | 1922 |
|
SU1999A1 |
| Устройство для автоматического управления рабочим органом землеройно-транспортной машины | 1985 |
|
SU1320349A1 |
| Система автоматического управления отвалом бульдозера | 1984 |
|
SU1182128A1 |
| Система автоматического управления строительно-дорожными и землеройно-транспортными машинами | 1991 |
|
SU1813144A3 |
| СПОСОБ УПРАВЛЕНИЯ ПРОЦЕССОМ КОПАНИЯ ГРУНТА ЗЕМЛЕРОЙНО-ТРАНСПОРТНОЙ МАШИНЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2232234C2 |
| СПОСОБ УПРАВЛЕНИЯ РАБОЧИМ ОРГАНОМ ЗЕМЛЕРОЙНО-ТРАНСПОРТНОЙ МАШИНЫ | 1997 |
|
RU2131961C1 |
| US 4194574 A, 25.03.1980. | |||

