(54) САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА РЕГУЛИРОВАНИЯ
| название | год | авторы | номер документа |
|---|---|---|---|
| АДАПТИВНАЯ СИСТЕМА ДЛЯ РЕГУЛИРОВАНИЯ И СТАБИЛИЗАЦИИ ФИЗИЧЕСКИХ ВЕЛИЧИН | 2011 |
|
RU2457529C1 |
| Самонастраивающаяся система регулирования | 1972 |
|
SU448432A1 |
| Самонастраивающаяся система регулирования | 1969 |
|
SU530657A3 |
| Многоканальная система экстремального регулирования | 1974 |
|
SU528544A1 |
| САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА УПРАВЛЕНИЯ | 1992 |
|
RU2068196C1 |
| Устройство для формирования двухфазных напряжений | 1982 |
|
SU1095097A1 |
| Система автоматического регулирования с компенсацией помех | 1980 |
|
SU941922A1 |
| Самонастраивающаяся система управления | 1979 |
|
SU845143A1 |
| Самонастраивающаяся система управления | 1982 |
|
SU1071997A1 |
| Генератор синусоидальных колебаний | 1978 |
|
SU744904A1 |
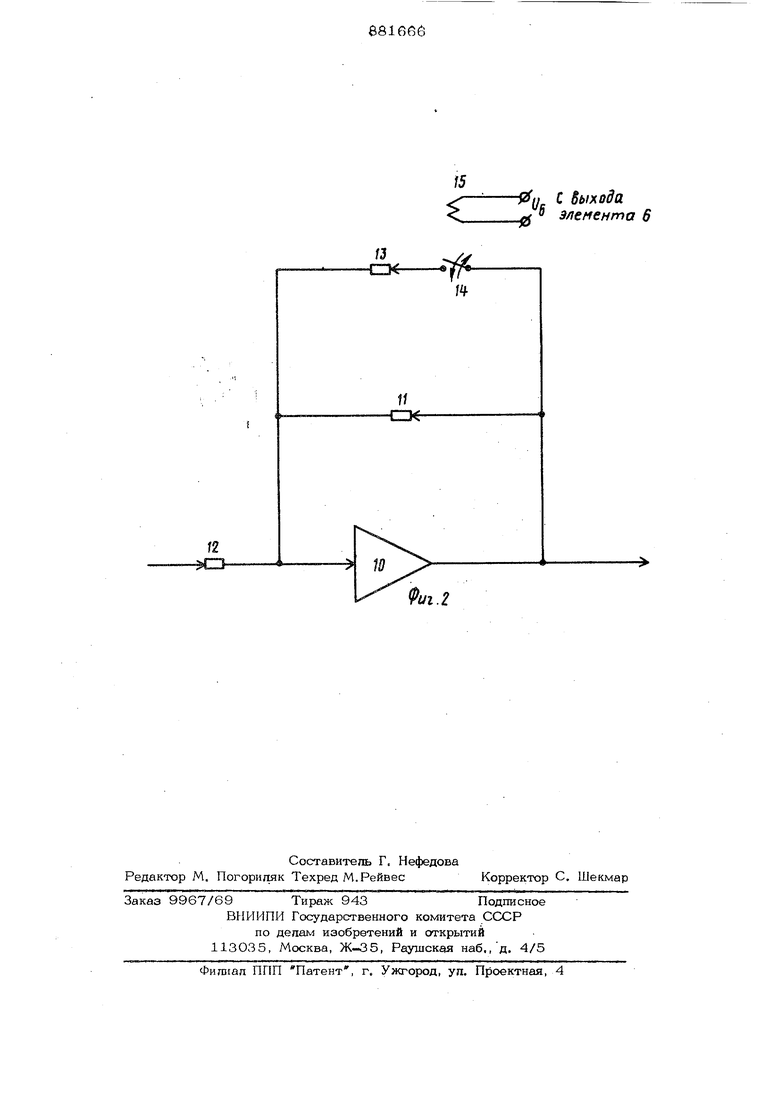
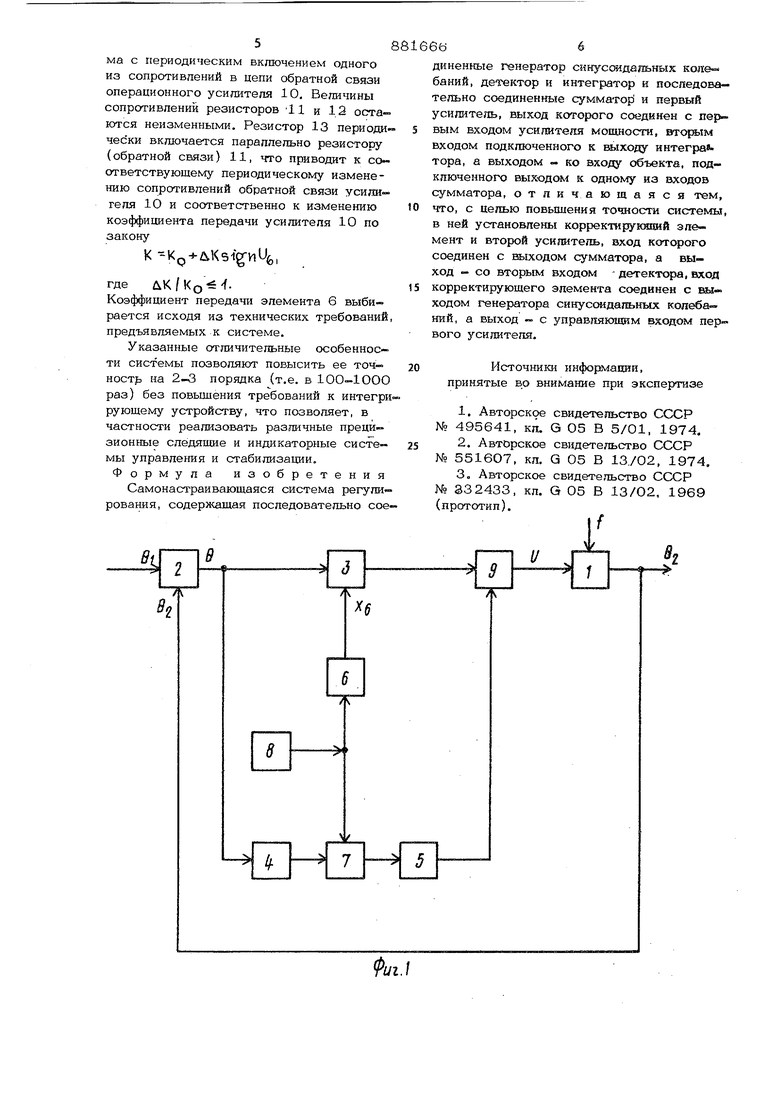
Изобретение относится к самонастраивающимся системам регулирования с источниками поискового сигнала и может найти широкое применение в системах автоматического управления летательными аппаратами (в автопилотах) и подводными и надводными кораблями (в авторулевых). Известны пропорционально-интегральные самонастраивающиеся системы регулирования, содержащие сумматор, выход которого через параллельно соединенные усилитель и интегратор соединен соответственно с первым и вторым усилителями мощности, выход последнего через исполнительный механизм соединен со входом объекта регулирования, выход которого соединен с одним из входов сумматора, и блок самонастройки, выходы которого соединены с управляющими входами усилителя и интегратора Ll и 2. Наиболее близкой по технической сущности к изобретению является самонастра ивающаяся система рогуляроЕшния, содержащая последовательно сординснпые гене- ратор синусоидальных колебаний, детектор и интегратор и последовательно соединенные сумматор и первый усилитель, выход которого соединён с первым входом усилителя мощности, вторым входом подключенного к выходу интегратора, а выходом - ко входу объекта, подкгаоченного выходом к одному из входов сумматора jsj. Однако эта система характеризуется недостаточной точностью. Целью изобретения является повышение точности системы. Поставленная цель достигается тем, что в системе установлены корректирующий элемент и второй усилитель, вход ко-, торого соединен с выходом сумматора, а выход - со вторым входом детектора, вход корректирующего элемента соединен с выходом генератора синусоидальных колебаний, а выход - с управляющим входом первого усилителя. На фиг. 1 приведена блок-схема системы на фиг. 2 - первый усилитель, пример реализации. 38 Система содержит объект (регупиро вания) 1, сумматор 2, первый и второй усигаггели 3 и 4, интегратор 5, коррек тирующий элемент 6, детектор 7, генератор синусоидальных колебаний 8, усипи« тепь мощности 9, операдионный усипи«. теЩ). 10, резисторы 11.13, перектгючатепь 14,управляющую обмотку перекгаочатегш 15, -выходной сигнал -j -ого функци™ онапьного блока системы, в,&2,&,,(} .соответственно входной и выходной сигна лы, сигналы ошибки, возм -щения и управ лени я. В предложенной системе коэффициент передачи первого усилителя 3 меняется в зависи Юсти От сигнала генератора си нусоидальных колебаний 8 по закону l(-bAKS1VlUJi, постоянная часть коэффициента передачи; соответотвеио амплитуда и кру. говая частота изменения коэффициента передачи, причем АК/КО - Ампли1уда изменения коэффициента передачи усилителя 9 задается с помощью элемента 6, а круговая частота - с помощью генератора синусоидальных колеба. НИИ 8, Предлагаемая система работает следующим образом. На входы сумматора 2 поступают вход ной (задающий) и выходной (регулируемая координата) сигналы системы. В сум маторе 2 они сравниваются. На выходе сумматора 2 формируется сигнал рассогласования (ощибки) системы, который поступает на информационные входы первого и второго усиш1телей 3 и 4. При рас смотрении принципа работы системы учитываем, что постоянный сигнал на входе детектора 7, например фазового, не дает постоянного сигнала на выходе, В течение первого полупериода измене ния коэффициента передачи усилителя 3 при действии на систему сигнала возму- щения и противодействующего ему сигнала управления U в установи вщемся ре жиме появляется отличный от нуля сигнал ощибки (регулирования) В- Величина сигнала ошибки 6 пропорциональна разности сигналов f-U- В течение второго полупе- рибда изменения коэффициента передачи усилителя 3, когда он уменьшится по сра нению с KQ разность сигналов f - L) воз растет, что вызывает увеличение величи ны сигнала ошибки (регулирования) 0. Та .КИМ образом, в среднем за период моду 6 яции в выходных сигналах усилителей 3 9 появляется дополнительная периодическая составляющая, изменяющаяся синхроно с изменением коэффициентов передачи силителя 3 и детектора 7. Наличие переменной составляющей в указанных сигналах, амплитуда которой пропорциональна игналу ошибки (регулирования) Q, обеспечивает на выходе детектора 7 наличие постоянного сигнала, который далее интегрируется в интеграторе 5 и поступает на второй вход, усилителя мощности 9. TaioJM образом, к объекту 1 прилагается сигнал управления (J, являющийся суммой выходных сигналов усилителя 3 и интегратора 5 и аналогичный тому, что формируется в классических системах с изо- дромным регулятором. Наличие же дрейфа нуля интегратора 5 вызывает появление изменения сигнала ошибки 0 с квазистатической постоянной скорости, которое не проходит через детектор 7, а проходит лишь через усилитель 3. Прохойшение сигнала ошибки О через усилитель 3 с изменяющимся коэффициентом передачи вызывает появление периодической сосаавляющей в составе сигнала управления U- Сигнал ошибки G, содержащий периодичес1огю составляющую, усиливается усилителем 4 и поступает на вход детектора 7, Детектор 7 выделяет из этого сигнала информацию, пропорциональную амплитуде переменной составляющей сигнала ошибки О- Одновременно детектор 7 превращает в периодически меняющийся сигнал постоянную составляющую сигнала ошибки б и, что особенно ваяшо, аддитивную помеху, имеющуюся на выходе усилителя 4 и приводящую к насыщению интегратора 5. Эти периодические составляющие подавляются выходным фильтром, входящим в состав детектора 7. Поставленный сигнал с выхода детектора 7 поступает на вход интегратора 5. Учитывая, что величина этого сигнала пропорциональна скорости изменения сигнала ошибки cL (т.е. ее причине - дрейфу интегратора 5), причем сигнала, существенно усиленного в усилителе 4. Проинтегрированный сигнал, имеющий знак, обратный знаку сигнала дрейфа интегратора 5, и имеющий большую крутизну, чем в известном устройстве, компенсирует дрейф интегратора 5. Практическая реализация изменения коэффициента передачи усилителя 3 может быть выполнена различными путями. В качестве примера (фиг. 2) показана схе5ма с периодическим вкгаочением одного из сопротивлений в цепи обратной связи операционного усилителя Ю. Вешчины сопротивлений резисторов 11 и 12 оста- ются неизменными. Резистор 13 периодачески включается параллельно резистору (обратной связи) 11, что приводит к со ответствующему периодическому изменению сопротивлений обратной связи усилителя 10 и соответственно к изменению коэффициента передачи усилителя 10 по закону K-Kp Ksig-nU, где AK/Ko- -fКоэффициент передачи элемента 6 выбирается исходя из технических требований предъявляемых к системе. Указанные отличительные особенности системы позволяют повысить ее точ- ность на 2-3 порядка (т.е. в раз) без повьциения требований к интегри рующему устройству, что позволяет, в частности реализовать различные преци зионные следящие и индикаторные системы управления и стабилизации. Формула изобретения Самонастраивающаяся система регулирования, содерх ащая последовательно сое Ъ диненные генератор скнусоида|1ьнь5х колебаний, детектор и интегратор к последовательно соединенные сумматор и первый усилитель, выход которого соединен с nejvвым входом усилителя мощности, вторым входом подкшоченного к выходу интегра тора, а выходом ко входу объекта, подключенного выходом к одному из входов сумматора, отличающаяся тем, , с цепью повьпиения точности системы, в ней установлены корректируккпий элемент и второй усилитель, вход которого соединен с выходом сумматора, а выход - со вторым входом детектора, вход корректирующего эпемента соединен с шл- ходом генератора синусоидальных колебаний, а выход - с управляюишм входом первого усилителя. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетепьство СССР NO 495641, кд. G О5 В 5/01, 1974. 2.Авторское свидетельство СССР № 551607, кл. Q 05 В 13./02, 1974, 3.Авторское свидетельство СССР № 332433, кл. Q 05 В 13/02, 1969 (прототип).
-
/5
-0n с Sbixoda 0 элепента 6
/3
.
ff CK12
