ностью цифро-аналоговых преобразователей .
Целью изобретения является расширение области применения устройства.
Поставленная цель достигается тем что в устройстве в каяодую координату введены последовательно соединенные дешифратор и дополнительный элемент ИЛИ, а первый вход шагового привода каждой координаты соединен со вторым входом второго счетчика, с третьим
входом элемента ИЛИ и с выходом дополнительного элемента ИЛИ данной координаты, подключенного вторым входом к выходу блока сравнения той же координаты, а входы дешифратора соединены с соответствующими выходами блока nporpai 5M и первого и второго счетчиков данной координаты.
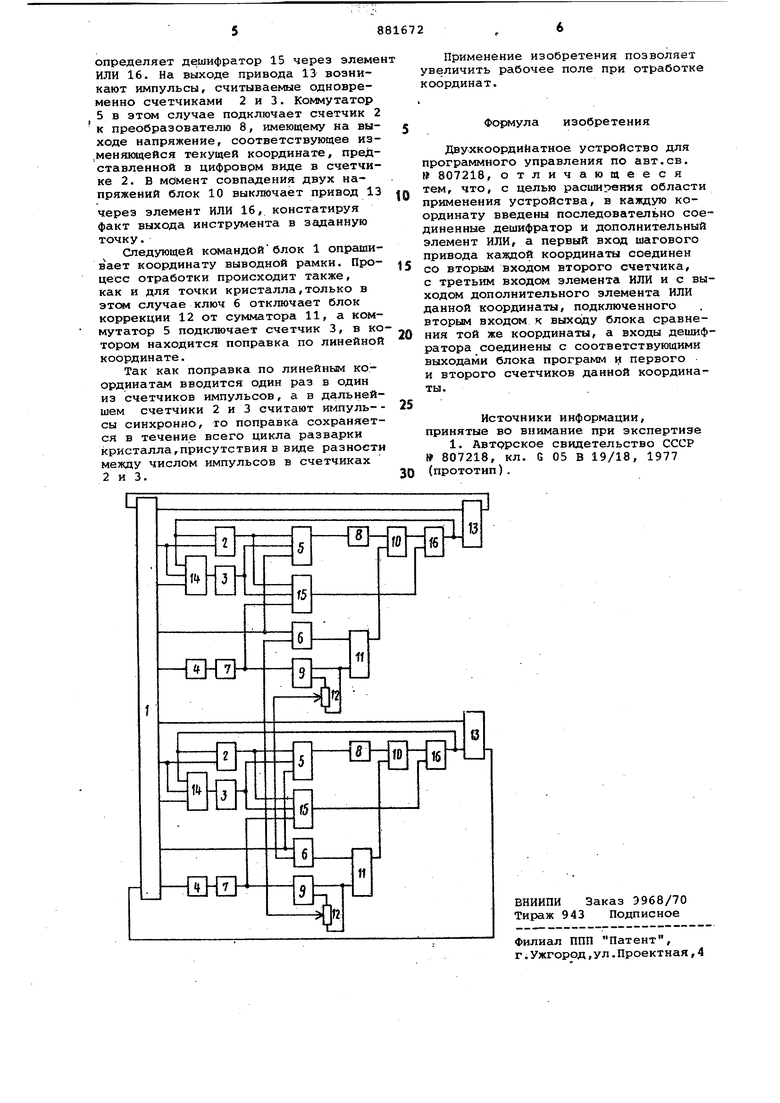
На чертеже приведена блок-схема устройства.
Устройство содержит командный блок 1 и два канала управления по координатам X и Y, каждый из которых состоит из второго 2 и первого 3 счетчиков, блока программ 4, коммутатора 5, ключа 6 г преобразователя кода 7, второго 8 и первого 9 цифроаналоговых преобразователей,блока сравнения 10, сумматора 11, блока коррекции 12, шаг ового привода 13, элемента ИЛИ 14, дешифратора 15 и дополнительного элемента ИЛИ 16.
Устройство работает следующим образом.
Блок 4 задает в двоично-десятичнс коде координату X точкисварки, а также знак координаты, которая трансформируется преобразователем 7 в двоичный код, а преобразователем 9 - в напряжение. Преобразователь 9 имеет прямой и инверсный выходы, сигналы с которых поступают на входы блока коррекции 12, причем прямой, сигнал (аналоговое значение координаты) одновременно поступает на сумматор 11. С выхода блока коррекции 12 снимается сигнал, равный по величине напряжения произведению координаты X точки сварки на кристалле на угол dl(sin ol5i.oL для малых углов), соответствующий углу разворота кристалла относительно положения, заданного по программе. Этот сигнал является поправкой к координате фотогонального направленияj поэтому он проходит через ключ 6 и суммируется с аналоговым значением координаты Y. Поправка по углу вырабатывается в канале координат Y, подается на сумматор 11 канала Х аналогичнь « образом через ключ 6 канала X. Элемент ИЛИ 14 позволяет вводить в счетчик 3 поправку по линейной координате.
Счетчик 2, как и счетчик 3, считает импульсы тактового генератора привода 13, причем направление счета (суммирование или вычитание) устанавливается с выхбда дополнительного
элемента ИЛИ 16. Счетчики 2 и 3 подключены через сумматор 5, управляемый блоком 1, к преобразователю 8, превращающему цифровую информацию, находящуюся в выбранном счетчике юлпульсов , в аналоговую форму (в напряжение) .
Блок 10 сравнивает напряжение,соответствующее значению еодресной координаты, в которую необходимо вывести сварочный инструмент с текущей координатой, в которой находится сварочный инструмент, приводимый в движение приводе 12. Кроме тою, блок 10 через дополнительный элемент ИЛИ 16 управляет включением и выключением привода 13 и задает направление перемещения по координате.Дешифратор 15 также воздействует на привод 13 через элемент ИЛИ 16, задавая направление перемещения.
В исходном состоянии положение сварочного инструмента совпадает с начальной точкой, относительно которой заданы координаты точек сварки кристалла и рамки. Оператором производится совмещение оптической метки (перекрестия), совпадающей с положением инструмента, с координатами первой точки сварки на кристалле, при этом в счетчик 3 через элемент ИЛИ 14 вводится поправка по координате. Ввод поправки по углу разворот осуществляется при повороте подвижно оптической системы метки (перекрести до положения, при котором линии метки становятся параллельными осям симметрии кристалла. Наличие механической связи между оптической системой и потенциометром угловой коррекции обеспечивает требуемое значение поправки по углу. Командой с выхода блока 1 опрашивается первая координата, Зс1данная в блоке 4, она преобразуется в двоичный код преобразователем 7, затем преобразойателем 9 - в напряжение, подается на сумматор 11 и блок коррекции 12.
В случае отработки координаты кристалла поправка с блока 12 канала Y через ключ 6 поступает на сумматор 11 канала X. В ортогональном канале происходитаналогичное действие.Одновременно с командой считывания координаты происходит запуск привода 13, при этом если значение адресной, координаты, получаемое из блока программы 4, не превышает разрешающей способности цифро-аналогового преобразователя 9, то направление перемещения привода.13 и направление счета счетчиков 2 и 3 определяет бло сравнения 10 через элемент ИЛИ,16. Если значение адресной координаты, получаемое из блока программы 4,превышает разрешающую способность цифроаналогового преобразователя 4, то направление перемещения Привода 13 и направление счета счетчиков 2 и 3 определяет дешифратор 15 через элеме ИЛИ 16. На выходе привода 13 возникают импульсы, считываемые одновременно счетчиками 2 и 3, Кокмутатор 5 в случае подключает снетчик 2 к преобразователю 8, имеющему на выходе напряжение, соответствующее изменяющейся текущей координате, представленной в цифроврм виде в счетчике 2 . В момент совпадения двух напряжений блок 10 выключает привод 13 через элемент ИЛИ 16, констатируя факт выхода инструмента в заданную точку. Следующей командой блок 1 опрашив ает координату выводной рамки. Процесс отработки происходит также, как и для точки кристалла,только в этом случае ключ 6 отключает блок коррекции 12 от сумматора 11, а коммутатор 5 подключает счетчик 3, в ко тором находится поправка по линейной координате. Так как поправка по линейным координатам вводится один раз в один из счетчиков импульсов, а в дальнейшем счетчики 2 и 3 считают импульсы синхронно, то поправка сохраняется в течение всего цикла разварки кристалла,присутствия в виде разности между числом импульсов в счетчиках 2 и 3. Применение изобретения позволяет увеличить рабочее поле при от{)аботке координат. Формула изобретения Двухкоордийатное устройство для программного управления по авт.св. № 807218, отличающееся тем, что, с целью расшигюния области применения устройства, в каждую координату введены последовательно соединенные дешифратор и дополнительный элемент ИЛИ, а первый вход шагового привода каждой координаты соединен со вторым входом второго счетчика, с третьим входом элемента ИЛИ и с выходом дополнительного элемента ИЛИ данной координаты, подключенного вторым входом к выходу блока сравнения той же координаты, а входы дешифратора соединены с соответствующими выходами блока программ и первого и второго счетчиков данной координаты. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР 807218, кл. G 05 В 19/18, 1977 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Двухкоординатное устройство дляпРОгРАММНОгО упРАВлЕНия | 1977 |
|
SU807218A1 |
| Двухкоординатное устройство для программного управления | 1979 |
|
SU881673A2 |
| Двухкоординатное устройство для программного управления | 1984 |
|
SU1193644A2 |
| Устройство для двухкоординатного программного управления | 1979 |
|
SU860007A1 |
| Устройство для вывода информации на экран электронно-лучевой трубки | 1977 |
|
SU1029177A1 |
| Устройство для определения координат контактных площадок кристалла | 1984 |
|
SU1203553A1 |
| Система адаптивного числового программного управления металлорежущим станком | 1980 |
|
SU954945A1 |
| Устройство для контурного управления промышленным роботом | 1984 |
|
SU1211691A1 |
| Устройство для программного управления | 1981 |
|
SU976428A1 |
| Установка для присоединения проволочных выводов | 1991 |
|
SU1773643A1 |
