Изобретение относится к электротехнике, а именно к двухкоординатным электро двигателям, и может быть использовано в механизмах металлообрабатывающих ста ков, координатографов, графопостроителей и т. д. Известен двухкоординатньА электродвигатель, состоящий из неподвижного магнитопровода из чередующихся полос с различной магнитной проницаемостью и якоря с двумя системами взаимноперпендикулярных обмоток, охватывающих зубцы полюсов, расположенных с противоположных сторон неподвижного магнитопрово даГИ. Недостатком известного двигателя явл ется наличие двух взаимноперпендикулярньсс систем чередующихся полос с различной магнитной проницаемостью, расположенных на двух параллельных сторонах магнитопровода, а также разделение полю сов якоря каждой координаты. Такое выполнение двигателя усложняет его конструкцию. Наиболее близким к предлагаемому по технической сущности является двухкоординатный электродвигатель, состоящий из неподвижного магнитопровода в виде плиты из чередующихся полос с различной магнитной проницаемостью, и якоря, с двумя системами взаимноперпендикулярных обмоток, охватывающих зубцы полюсов 21. Недостатком этого двигателя является повьцценная сложность, обусловленная наличием двух взаимноперпендикулярных систем чередующихся полос с различной магнитной прсжицаемостью на одной из поверхностей неподвижного магнитопровода. Цель изобретения - улучшение KOHCTV рукции двигателя. Указанная цель достигается тем, что зубцы каждого полюса якоря вьшолнены с щагом, равным шагу полос неподвижного магнитопровода, и расположены от носительно Последних под углом 45°. Такое выполнение двигателя позволяет обойтись одной системой чередующихся
nojioc с раакйчной магнита.ой проницаемостью, распаиоженной на неподвижном магнитопроводе, что существенно упрощает конструкцию ДЕИга-тепя,,
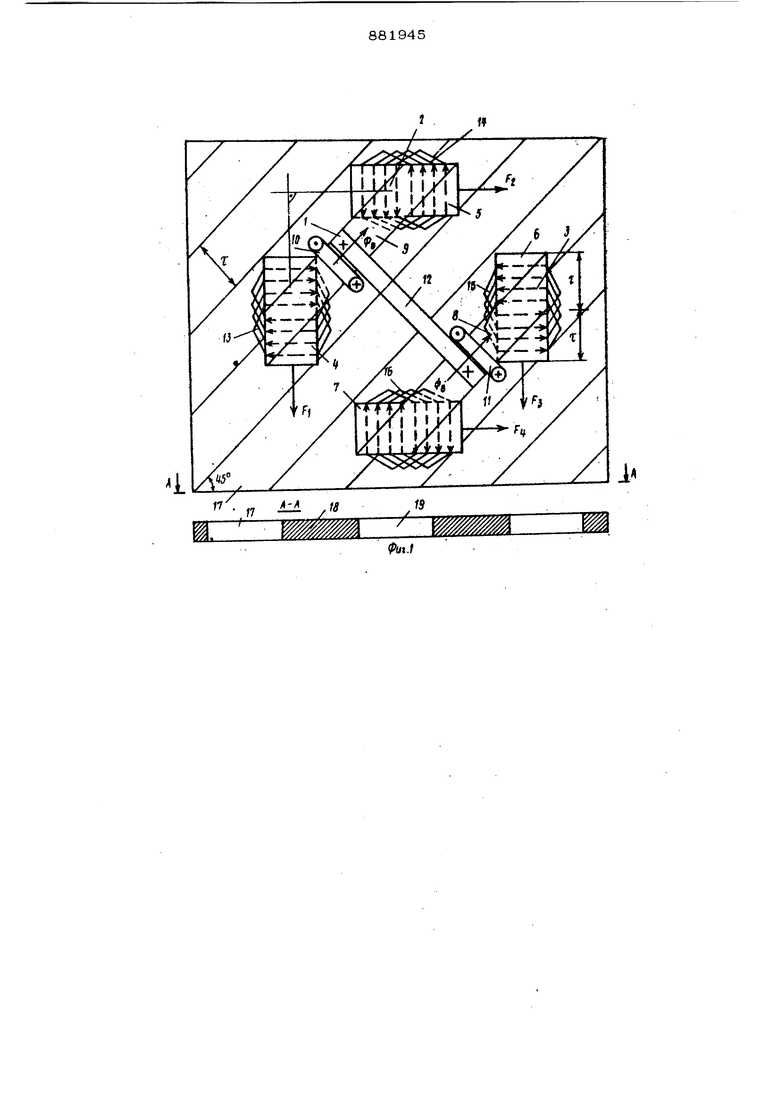
На фиг. 1 схемате:чно изображен двн. гателЬэ общий вид в плане, на фкг. 2 векторы ш:говьрс сил создаваемых коор Дйнатнь 4-н сяс1«мамм двигаа-епя.
Дв: Гл;коорд;гнаткь;:: электродвигатель (фиг, 1) состойг не якоря 1, вьтопненнаго в виде двух маткитопроводов 2,3, каждый КЗ которых включает в себя полюса соответственно, 4, 5; к 6, 7, с пазами длиной равной 2 Т , расположенньк под прямым ухлом друг к другу и соединенных между собой ярмами 8, 9 на icoTopbix; размещаются o6MOTKts возбуждения lOj 11„ МагнйтопровоДы 2, 3 распатюженььпод угном 9О°друг к другу между собой и соединены ферромагнит-. ной пластиной 12. В пазах полюсов 4 7 размещены .якорные обмотки 13 - 16, анаяоптчныв оймоткам двигателей посто кыного тока. Питание якорн.ых. обмоток 4oжeт осу цестЕЛятьс.я через плоский электромеханический коллек1Т)р или с помощью полупроводникового коммутатора, работающего от датчиков положения, установленных на якоре.
Неподвижный магнитопровод представ.няет собой ufmr-f 17„ набранную из чере дующнхся понос 18s 19 разной магнитной пргэннцаемости (нааример, стальных и алюмяниевь0с)в шириной равной (. ,,
Для создания магнитной цепи и обеспечення работы двигателя в соотаетствии с ностайгеенной цеиьЮ; якорь расположен над непсдвижньду магнитопроводом таким образом ч-:гобы напраш1ени.я потоков обыоток Бозбу к/:йэкия якоря и полос неподнЕжиого магнйтопроБода совпали.
ДЕН: атепь работает следующим обра;vOM.,
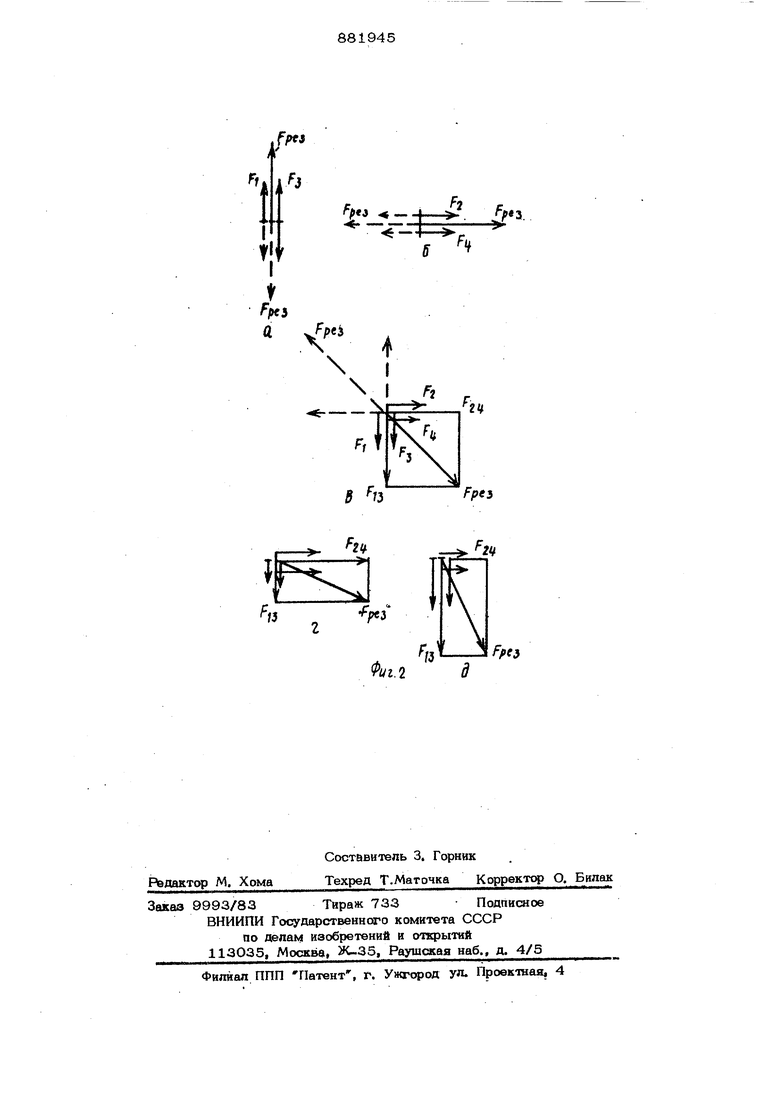
Якорь перемещается по плите на воз душной подутцке или на роликах в направлениях, определ.яемых результирующим уснпн-эм Fpa- создаваемым соотавляющиMil энектромагннтнь.к усилий (а (фиг.. 2; а1 зн скающ гх за счет взаимо дейсгвмн магнитного поля обмотки возбуждений к проводниками як орньж обмо токз обтекаемьнс токами управлений, гтри этом работают, тоиько те участки эпемеН тов с обмот5самИе которые находятся над участками неподвижного магнитопровода с высокой магнитной проводимостью (над стальными полосами)9454
При принятых на фиг. 1 направлениях . токов силы, действующие на полюса, обозначены стрелками.
Усилия f-f , симметричны от5 носительно центра масс якоря двигателя, что обеспечивает отсутствие ггаразитньк поворотных моментов. При перегч/гешении якоря ток в обмотках переключают таким образом, чтобы секции, находящиеся 0 против стальнь ЕХ полос неподвижного магнитопровода, всегда имели одно и тоже направление токов относительно магнитного потока возбуждения. Такая коммутация секций обеспечивает постоянное 5 направление действия тяговых усилий и равномерное перемещение якоря.
Усилия f 1 FI ) РЗ I f можно изменить как по величине, так и по направлению действия, изменяя тем самым дей0 ствие результирующей силы, как по величине, так к по направлению (фкг, 2а, б в, г, и д.), В результате якорь под действием такой силы перемещается по задаваемым траекториям. На фиг. 2а, б в, г
5 и Д показаны различные варианты действия составляющих сил, определяющих результирующую силу и направление перемещения якоря двигателя под ее Действием. Регулирование скорости движения якоря
Q двигателя можно осуществлять изменением потока возбуждения или изменением величины тока в якорных обмотках. Реверс в двйгатеяе осуществляется изменением направления токов в якорных обмотках или переключением полярности напря Кения обмотки возбуждения.
Формула изобретения
ДвухкоорДйнатный электродвигатель, состоящий из неподвижного магнитопровода в виде плоской плиты из чередующихся полос с различной магнитной проницаемостью и якоря с двумя системами взакмо перпендикул$фньк обмоток, свсватывающих
зубцы полюсов, отличающийся тем, что с целью упрощения, зубцы каждого полюса якоря вьтолнены с шагом, равным щагу полос неподвижного магнитопровода и расположены относительно по-
0 следних под углом 45.
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 504278, кл. Н 02 К 41/02, 1972.
5 2. Электропривод и автоматизация промышленных установсж, т. 6, Луценко В. Е. Рубцов В. Г. Электропривод с шаговыми двнгаталяш, 1978, с. ЗО-32.
t
ГАСЗ
t
5б
ff
. I F,
гч
.1
S /3
Fpts
.
J3
Фиг.2
| название | год | авторы | номер документа |
|---|---|---|---|
| Двухкоординатный электродвигатель постоянного тока | 1980 |
|
SU1037384A1 |
| Двухкоординатный электрическийдВигАТЕль | 1979 |
|
SU849389A1 |
| Линейный электродвигатель постоянного тока | 1978 |
|
SU978284A1 |
| Линейный электрический двигатель постоянного тока "Подэлин | 1979 |
|
SU1001347A1 |
| Двухкоординатный электрический двигатель | 1980 |
|
SU972637A1 |
| Двухкоординатный шаговый электродвигатель | 1977 |
|
SU657539A1 |
| ЭЛЕКТРОАГРЕГАТ | 1995 |
|
RU2112309C1 |
| ЛИНЕЙНЫЙ СИНХРОННЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 1986 |
|
SU1371370A1 |
| Линейный электродвигатель "Бимарпол | 1978 |
|
SU942217A1 |
| Линейный шаговый электродвигатель | 1972 |
|
SU504278A1 |