(S) УСТРОЙСТВО для УДАЛЕНИЯ ГРАТА С ПЛОСКИХ ДЕТАЛЕЙ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для удаления грата с плоских поверхностей | 1981 |
|
SU969490A1 |
| Устройство для удаления грата с плоских деталей | 1979 |
|
SU893408A1 |
| Установка для удаления грата с плоских деталей | 1980 |
|
SU950510A1 |
| Устройство для удаления грата с плоских деталей | 1986 |
|
SU1344519A1 |
| Устройство для удаления грата после газокислородной резки | 1987 |
|
SU1500457A1 |
| Устройство для удаления грата с плоских деталей | 1987 |
|
SU1409439A1 |
| Ножницы для резки листового материала | 1977 |
|
SU651672A3 |
| Устройство для доводки деталей | 1982 |
|
SU1027016A1 |
| УСТРОЙСТВО ДЛЯ СНЯТИЯ ГРАТА, ОБРАЗУЮЩЕГОСЯ ПРИ ГАЗОПЛАМЕННОЙ РЕЗКЕ СЛЯБОВ | 2000 |
|
RU2176166C2 |
| Поточная линия для производства сварных изделий | 1974 |
|
SU507419A1 |
1
Изобретение относится к области сварочного производства, а точнее к устройствам для механизированной очистки плоских деталей после газо- , термической резки.
Изобретение наиболее зффективно может быть использовано в машиностроении , в листопрокатном производстве на установках термической .. резки проката и в заготовительных отделениях сборочно-сварочных цехов.
Известно устройство для удаления грата с плоских деталей, содержащее держатель с ножами, установленный 15 с возможностью возвратно-поступатель-ного перемещения на сгойках нащ тран-. спортером деталей tH
Недостаток известной конструкции 20 устройства для удаления грата с плоских деталей заключается в том, что рно снижает грат только с боковых сторон, а передние и задние концы деталей остаются необработанными. Для 25 удаления грата с передних и задних концов деталей необходимо разворачивать их на 90 и производить повторную операцию зачистки, что снижает производительность процесса. 30
Цель изобретения - повышение производительности и расиирение технологических возможностей устройства.
Поставленная цель достигается тем, что в устройстве для удгшения грата с плоских деталей, содержащем держатель с ножами, установленный с возможностью возвратно-поступательного перемещения на стойках над трансп фтером детсшей, держатель смонтирован на стойках посредством эксцентриков к с возможностью изменения его положения под углом к направлению перемещения деталей/ а устройство снабжено механизмом регулировки положения держателя по высоте относительно обрабатываемой детали, выполненным в виде силового цйяишфа, смонтированногд на стойке, и рычага, установленного на конце держателя и связанного со штоком упомянутого цилиндра.
Такое конструктивное выполнение устройства для удаления грата с плоских деталей позволяет повысить его производительность и расширить технологические возможности : благодаря тому, что установка вала на эксцентриках, размещенных в подшипниках, С71вяэаиного с поворотной плитой, а такжевозможность перемещения привода для
озвратно-постунательного перемещения вала, позволяет изменять положение Всша в горизонтальной плоскости и по высоте относительно обрабатываемой етали. В свою очередь, это обеспечивает одновременное снятие грата со всех кромок детали независимо от ее величины и, следовательно, исключение операций переустановки детали, а также обработку деталей в большом иапазоне толщин,
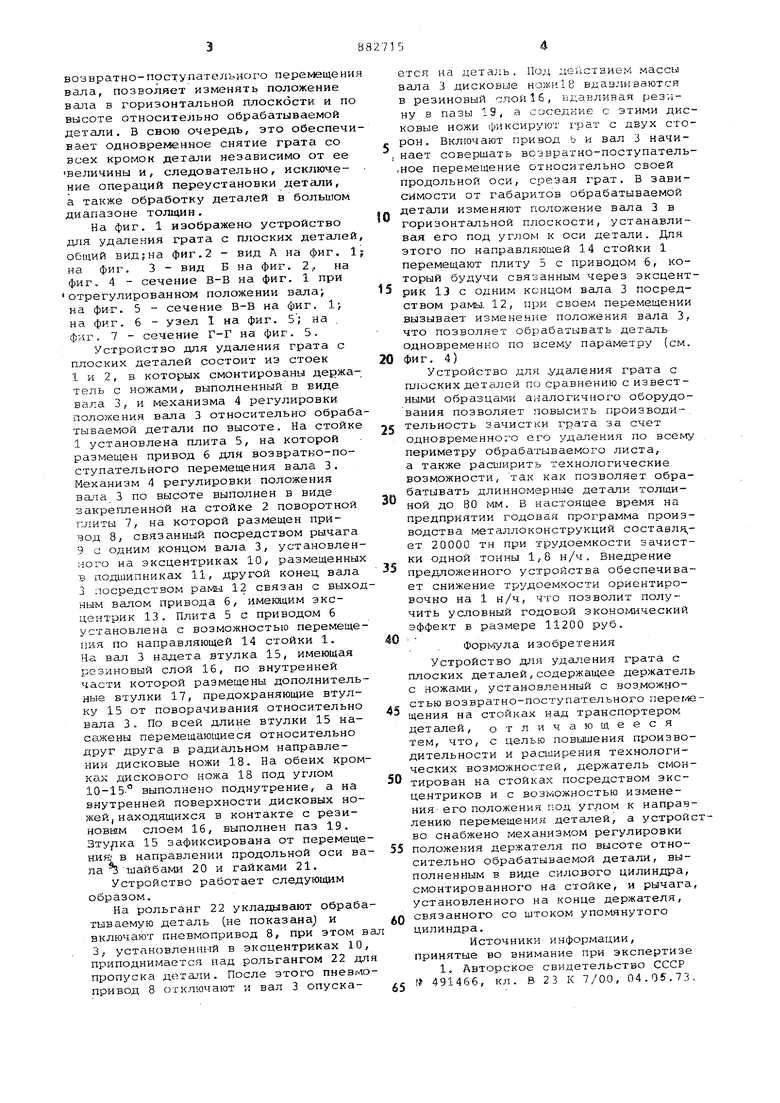
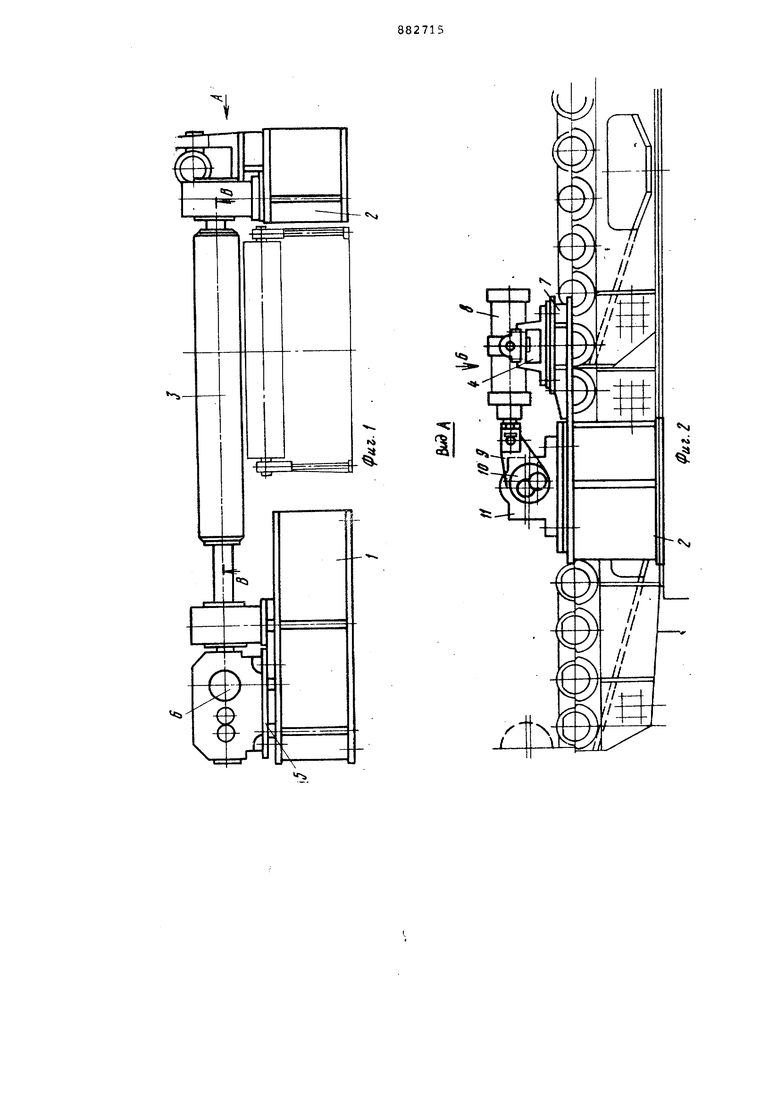
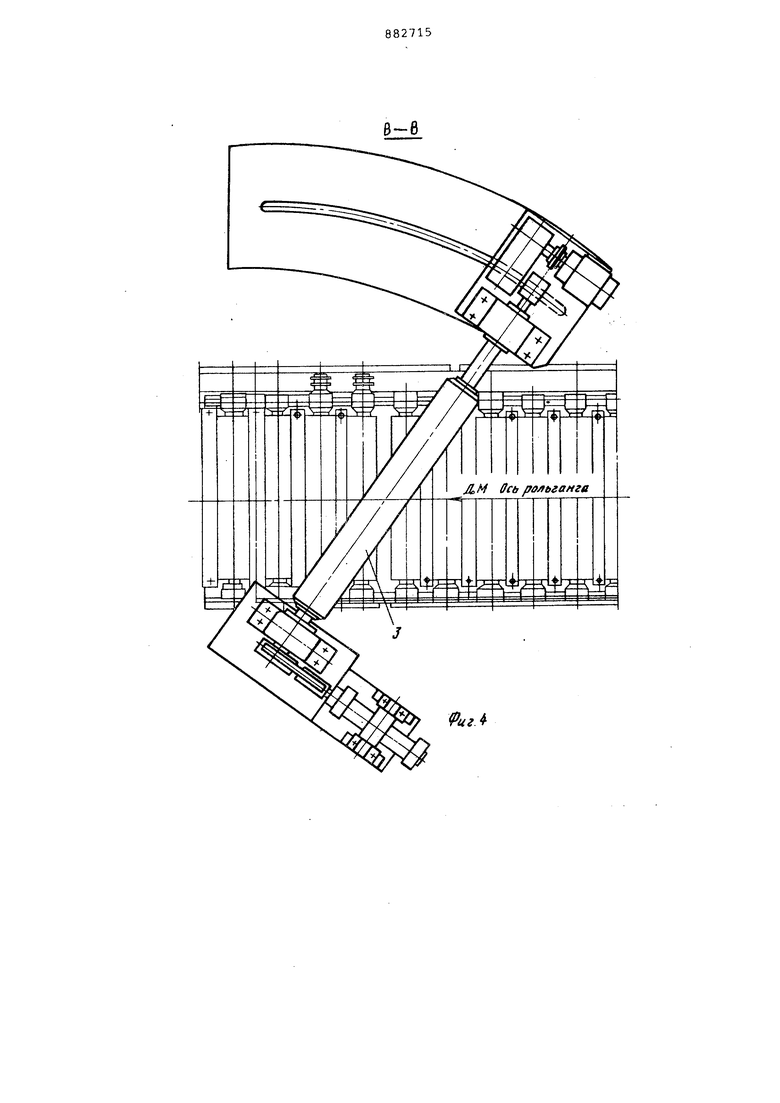
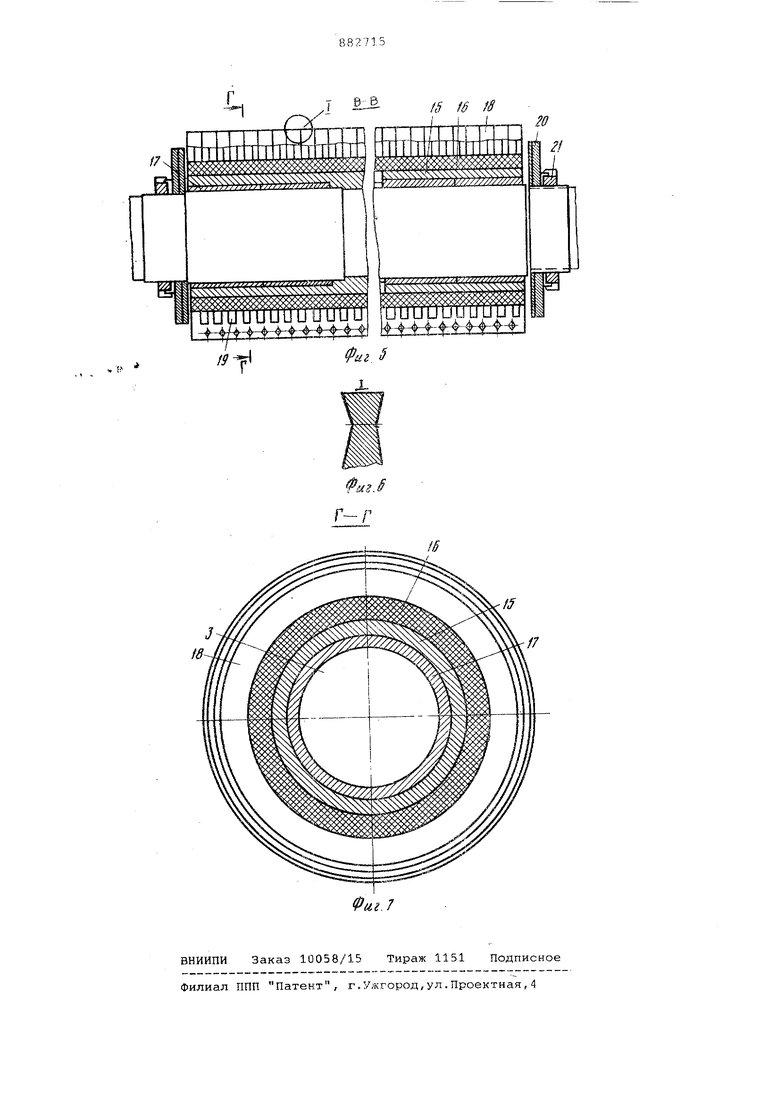
На фиг. 1 изображено устройство ля удаления грата с плоских деталей, бщий вид;на фиг.2 - вид А на фиг. 1; а фиг. 3 - вид Б на фиг. 2, на фиг. 4 - сечение В-В на фиг. 1 при отрегулированном положении вaлa на фиг. 5 - сечение В-В на фиг. , на фиг. 6 - узел 1 на фиг. 5; на фиг. 7 - сечение Г-Г на фиг. 5.
Устройство для удаления грата с плоских деталей состоит из стоек 1 и 2, в которых смонтированы держатель с ножами, выполненный в виде вала 3, и механизма 4 регулировки положения вала 3 относительно обрабатываемой детали по высоте. На стойке 1 установлена плита 5, на которой размещен привод 6 для возвратно-поступательного перемещения вала 3. Механизм 4 регулировки положения вала 3 по высоте выполнен в виде закрепленной на стойке 2 поворотной плиты 7, на которой размещен привод 8, связанный посредством рычага 9 с одним концом всша 3, установленного на эксцентриках 10, размещенных в подшипниках 11, другой конец вала 3 посредством рамы 12 связан с выходным валом привода б, имеющим эксцентрик 13. Плита 5 с приводом 6 установлена с возможностью перемещения по направляющей 14 стойки 1. На вал 3 надета втулка 15, имеклдая резиновый слой 16, по внутренней части которой размещены дополнительные втулки 17, предохраняющие втулку 15 от поворачивания относительно вала 3. По всей длине втулки 15 насажены перемещающиеся относительно ДРУГ друга в радиальном направлении дисковые ножи 18. На обеих кромках дискового ножа 18 под углом 10-15. выполнено поднутрение, а на внутренней поверхности дисковых ножей, находящихся в контакте с резиновым слоем 16, выполнен паз 19. Вту/1ка 15 зафиксирована от перемещеmifsiB направлении продольной оси вала %шайбами 20 и гайками 21.
Устройство работает следующим образом.
На рольганг 22 укладывают обрабатываемую деталь (не показана и включают пневмопривод 8, при этом вал 3, установленный в эксцентриках 10, приподнимается над рольгангом 22 для пропуска детали. После этого пневмопривод В отключают и вал 3 опускается на деталь. Под действием массы вала 3 дисковые вдавливаются в резиновый слой 16, вдавливая резину в пазы 19, а соседние с этими дисковые ножи (1)иксируют грат с двух сторон. Включают привод б и вал 3 начинает совершать возвратно-поступатель,ное перемещение относительно своей продольной оси, срезая грат. В зависимости от габаритов обрабатываемой детали изменяют положение вала 3 в горизонтсшьной плоскости, устанавливая его под углом к оси детали. Для этого по направляющей 14 стойки 1 перемещают плиту 5 с приводом 6, который будучи связанным через эксцентрик 13 с одним концом вгша 3 посредством рамы. 12, при своем перемещении вызывает изменение положения вала 3, что позволяет обрабатывать деталь одновременно по всему параметру (см. фиг. 4)
Устройство для удаления грата с плоских деталей по сравнению с известными образцами аналогичного оборудования позволяет повысить производительность зачистки грата за счет одновременного его удаления по всему периметру обрабатываемого листа, а также расширить технологические возможности, так как позволяет обрабатывать длинномерные детали толщиной до 80 мм. В настоящее время на предприятии годовая программа производства металлоконструкций составля,ет 20000 тн при трудоемкости зачистки одной тонны 1,8 н/ч. Внедрение предложенного устройства обеспечивает снижение трудоемкости ориентировочно на 1 н/ч, что позволит получить условный годовой экономический эффект в размере 11200 руб.
Формула изобретения
Устройство для удаления грата с плоских деталей,содержащее держатель с ножами, установленный с возможно стью возвратно-поступательного пepe 4eщения на стойках над транспортером деталей, отличающееся тем, что, с целью повышения производительности и расширения технологических возможностей, держатель смонтирован на стойках посредством эксцентриков и с возможностью изменения его положения под углом к направлению перемещения деталей, а устройсво снабжено механизмом регулировки положения держателя по высоте относительно обрабатываемой детали, выполненным в виде силового цилиндра, смонтированного на стойке, и рычага, установленного на конце держателя, связанного со штоком упомянутого цилиндра.
Источники информации, принятые во внимание при экспертизе
Фиг.З
