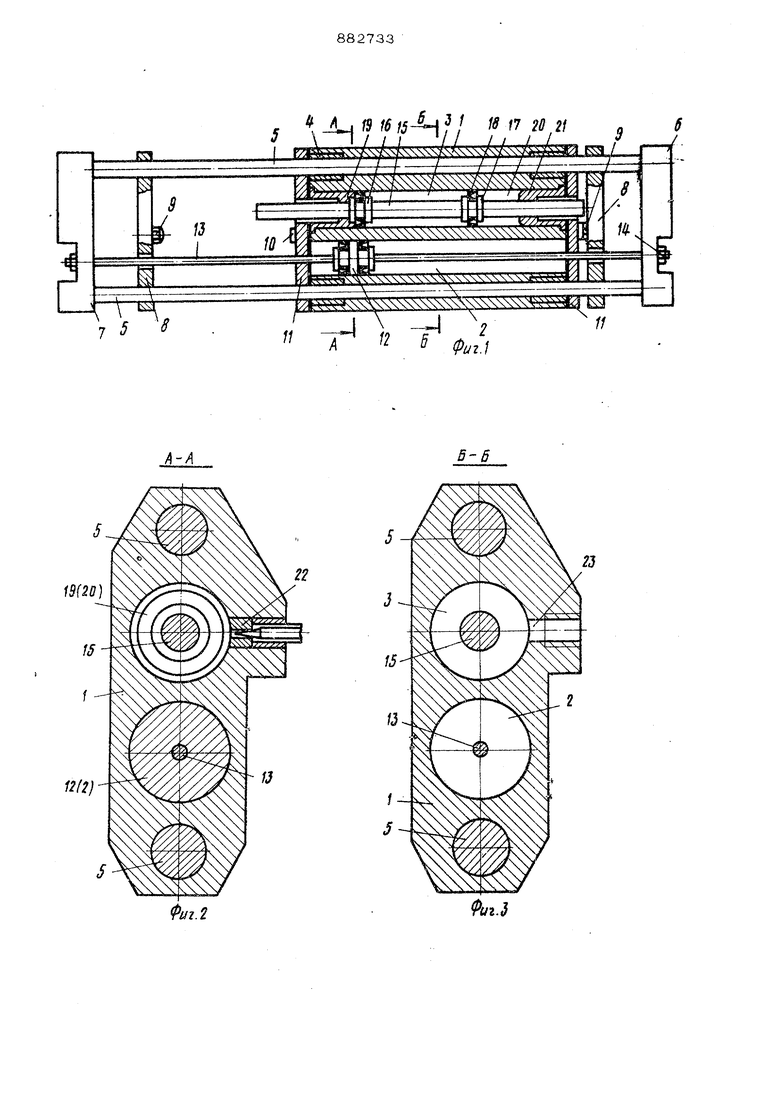
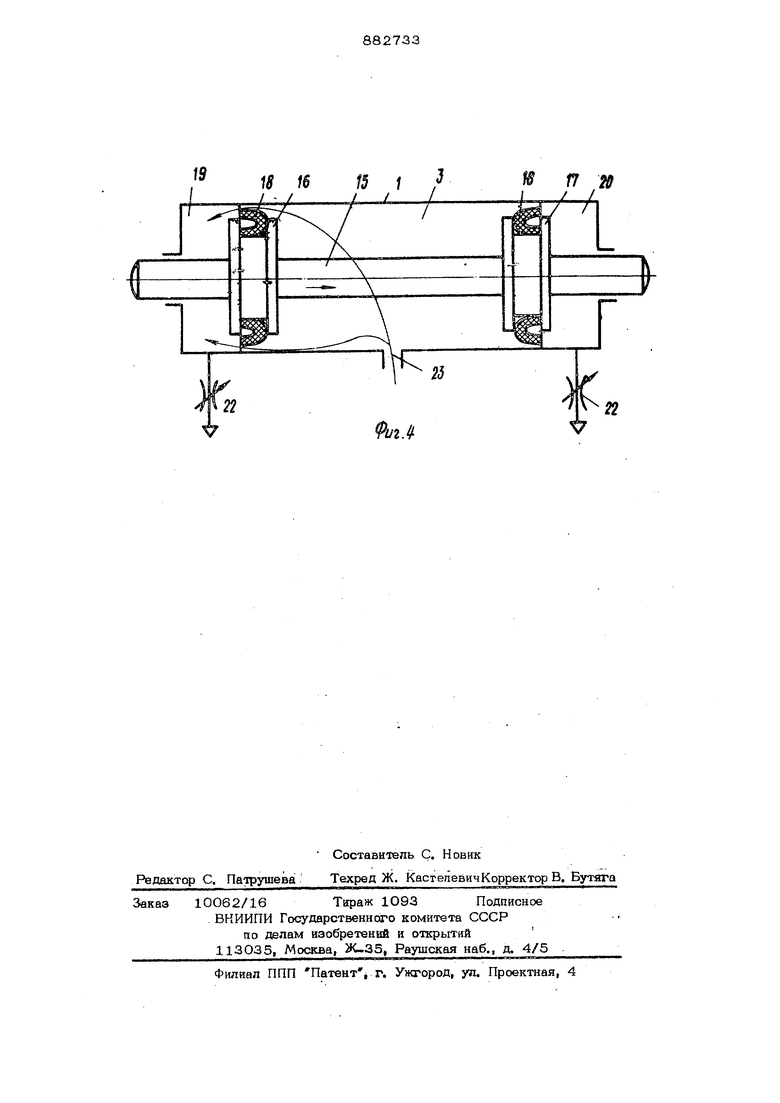
Изобретение относится к станкострое-; нию, а более конкретно - к промышлен- ным работам. Известен модуль промышленного робота, содержащий корпус, привод в виде сипового цилиндра, траверсы, демпфер в виде дополнительного силового цилиндра и укрепленные подвижно на штангах перемычки 1, Дополнительный силовой цилиндр (демп фер) содержит шток с поршнем и дроссели соединяющие его рабочие полости с атмосферой. Он гасит скорость подвижных час тей модуля (и присоединенных к нему масс) и обеспечивает безударный-подход их к упорам. Однако такая конструкция демпфера требует значительного (по сраЕмению со временем перемещения) выстоя подвижной части модуля в каждом крайнем ntxложении. Это обусловлено необходимостью наполнения воздухом из атмосферы через дроссель той полости силового цилиндра демпфера, которая расширилась при пред- шествующем ходе. Эффективная площадь поршня силового цилиндра привода модуля уменьшена значительным диаметром штока, работающим как на растяжение, так и на сжатие. Эти Две причины снижают динамические свойства модуля. Цель изобретения - повьпиение динамических свойств модуля промышленного робота. Поставленная цель достигается тем, что дополнительный силовой цилиндр (демп-1 фер) выполнен в виде штока с двумя поршнями, снабженными клапанами, а на корпусе этого цилиндра выполнено радиальное отверстае, причем шток основного силового цилиндра выполнен в виде струньи Кроме того, поршни демпфера установлены на штоке на расстоянии не меньше хода штока, а клапаны выполнены в виде уплотнктельных манжет V -образного профиля, установленных на поршнях демпфера наружу впадинами профилей. На фиг. 1 изображен модуль,продольный разрез г на фиг. 2 - сечение А-А на фиг, 1; на фиг. 3 - сечение Б-Б на фнг.1 на фиг. 4 - схема движения воздуха в демпфере. Предлагаемый модуль (фиг. 1, 2 и 3) содержит корпус 1, в котором вьтолнены цилиндрические отверстия для основного силового цилиндра 2 пневмопривода и дополнительного силового цилиндра 3 .Демпфера соответственно. Кроме того, в корпусе 1 выполнены еще Два отверстия, где установлены антифрикционные втулки 4 для направляющих штанг 5. Оси всех упомянутых отверстий параллельны. Концы направляющих 5 жестко соединены с траверсами 6 и 7. На штангах 5 закреп; лены с возможностью перемещения, например при помощи клёммных соединений перемычки 8 с подвижными упорами 9. Неподвижные упоры 10 укреплены в кор пусе 1 и выходят за его крьвики 11. По шень 12 соединен со штоком 13, выпол- венным в виде струны, которая натянута между траверсами 6 и 7, опирающимися на штанги 5. Шток 13 проходит сквозь перемычки 8 с зазором и крепится гайками 14 на траверсах 6 и 7, Шток 13 назван струной потому, что из-за малого поперечного сечения, его жесткость недостаточна для передачи сжимающей силы, но прочность достаточна для передачи необходиКгых растягивающих сил, В крышках 11 выполнены уплотнения (не п казаны) штока 13. . На штоке 15 силового цилиндра, демпфе ра на расстойнин не менее хода демафера друг от друга, установлены поршни 16 и 1 в KafiaBKax которых установлен з1 манжеты 18У-образного профиля (фиг. 1 и 4). Впадины профилей манжет 18 направлены наружу, т. е. в сторону полостей 19 и 2О силового цилиндра демпфера. Втулки 21 демпфера снабжены уплотнительными элементами (не показаны), взаимодействующими со штоком 15 демпфера. Размер втулки 21 в осевом направлении выбран таким, чтобы суммарная дл на полостей 19 и 20 была не менее хода демпфера. Полости 19 и 20 соединены с атмосферой дросселями 22 (фиг. 2), уста новленными вблизи втулок 21. Посредине силового цилиндра 3 демпфера выполнено радиальное отверстие 23 (фиг. 3) Работа модуля осуществляется следующим образом. Пусть в исходном положении подвижная /часть модуля смещена в крайнее левое (по фиг, 1) положение. Сжатый воздух подается в правую полость силового цилнн;фа 2, а его левая полость сообщена с атмосферой. Поэтому упор 9 правой перемычкн 8 прижат к правому неподвиншому упору Ю. Правая перемычка 8 воздействует и на конец щтока 15 демпфера, удерживая его в крайнем левом положении, которое характеризуется зазором порядка нескольких десятых Долей миллиметра между поршнем 16 и левой втулкой 21 (чтобы исключить соударения поршней 16, 17 и втулок 21 при работе модуля). Предлагаемый Модуль работает в двух режимах: нормального и жесткого демпф|фования. Для работы в первом режиме отверстие 23 сообщаемся с атмосферой на протяжении всего цикла , в т. ч. и исходном положении. Для приведения модуля в движение, сжатый воздух переключается из правой (по фиг. 1) полости силового цилиндра 2 в левую. В момент, когда сила, развиваемая на поршне 12 и передаваемая через левую часть штока 13 (струны) на подвижную часть модуля, превысит силы трения по.коя, подвижная часть начнет перемещаться ,вправо. Законы ее Движения зависят от характера нагрузки, давления в сети сжатого воздуха, проходных сечений пневмораспределителей (не показаны), диаметров поршня 12 и щтока 13, сил трения и т, п, В случае постоянной нагрузки подвижная часть модуля будет двигаться сначала равноускоренно, а затем равномерно до момента встречи левой перемычки 8 со штоком 15 демпфера. С этого момента поршни 16 и 17 начинают двигаться вправо, воздух полости 20 сжимается поршнем 17 и начинает вытекать через дроссель 22 в атмосферу. Манжета 18 поршня 16 под действием разряжения со стороны впадины V -образного профиля и повьш енного давления со стороны вьтуклости складывается и пропускает воздух из межпоршевой полости силового цилиндра 3 и отверстия 23 в полость 19. Благодаря демпфированию скорость содарения левой пары упоров 9 н 10 при остановке подвижной части модуля полуается малой. После остановки подвижной части возух из полости 20, сжатый движением поршня 17 вправо, продолжает вытекать через дроссель 22 в атмосферу. Время выстоя подвижней части модуля в любом из крайних по ожений колебпется от долей секунды До нескольких секунд (технологические выдержки). Для перемещения вправо левая полост силового цилинщэа 2 сообщается с атмоо ферой, а правая с сетью сжатого воздуха. Сила, развиваемая на поршне 12 сило вого цилиндре перемещает подвижную часть модуля влево. После вхождения в контакт правой перемычки 8 и правого квцца штока 15 демпфера воздух в полости 19 сн имается, демпфируя подвижную часть, А манжета 18 поршня 17 склаДБшается, пропуская воздух из ме поршневой полости силового цилиндра 3 и отверстия 23 в расширяющуюся полость 20. Т. е. направления движения воэпука в демпфере будут обратными к изображенным на схеме по фиг. 4. После смыкания правой пары упоров 9 и 1О и стравливания воздуха вз полости 19 через дроссель 22 в атмосферу, модуль приходит в исходное положение , т, е. заканчивается цикл работы мо дуля. При работе модуля с нагрузками, обладающими высокой инерцией, а также 1ф необходимости перемещений с высокими скоростями, модуль переключается в режим жестсжого демпфирования. Для этог через отверстие 23 в межпоршневую полость силового цилиндра 3 демпфера подается сжатый воздух постоянно или на пе риоды его подачи в полости силового цилиндра 2. Сжатый воздух из межпс шнеВ(Л полости через клапаны (манжеты 18 попадает в полости 19 и 2О, где устанавливается повышенное давление, бпязкое к сетевому. Поэтому демпфирующая сила и масса воздуха, вытесняемсяо из демпфирующей полости 20 (при движении поршней 16 и 17 вправо) или из полости 19 (при дв жении влево), увеличиваются пропо{щи(нально росту абсолютного давления возду ха в демпфирующих полостях. Качество демпфирования повышается благодаря введению клапанов D виде манжет, позволяющих заполнють расширяющие ся полости демпфера воздухом с атмосфорным или более высоким давлением через центральное отверстие в цилиндре демпфера. Если источник или сеть сжатого воздуха для пневмопривода и демпфера од - на, то проявляется еще одно полезное свойство (эффект) предлагаемого модуля - инвариантность к давлению. Действительно, при росте (падении) дивления воздуха в сети происходит рост (падение) движущей силы и сксрости движения подвижной части модуля, но-тем более (менее) становится зависящая от давления сила демпфирования, что предотвращает удары мли длительные движения с малой ползучей скоростью возле конечных положений. Формула изобретения 1.Модуль промышленного робота, содержащий корпус, привод в виде силового цилиндра, траверсы, демпфер в виде до - полнительного силового цилиндра и укрепленные подвижно на штангах перомычки, отличающийс , что, с целью повышения динамических свойств модуля, дополнительный силовой цилиндр выполнен в виде штока с двумя поршнями, снабженными клапанами, а на корпусе этого цилиндра выполнено радиол..ное отверстие, причем шток основного силового цилиндра выполнен в виде струны. 2.Модуль по п. 1, о т л и ч а ю - щ и и с я тем ,что поршни демпфера установлены на штоке на расстоянии не меньше хода штока. 3.Модуль по п. 1, о т л и ч а ю щ и и с я тем, что, с целью упрощения конструкции, клапаны выполнены в виде уплотнительных манжет V -образного профиля, установленньк на поршнях демпфера наружу впадинами профилей. Источники информации пршятые во внимание при экспертизе 1.ЯХИМОВИЧ В. А. и др. Переналаживаемые сборочные автоматы. Киев, Teix- вика, 1979, с. 64, черт. 36 , V 5 V jLi /5/5/5- f/ ,/../ /....//.,/./,././.„ / T,,, )CSNCsN Ji i ai/ f- / гггяИ fc
| название | год | авторы | номер документа |
|---|---|---|---|
| Пневмопривод | 1983 |
|
SU1224472A1 |
| ПНЕВМОЦИЛИНДР | 1991 |
|
RU2006684C1 |
| Устройство для резки заготовок на кольца | 1990 |
|
SU1736717A1 |
| Замедлитель железнодорожного транспортного средства | 1983 |
|
SU1183415A1 |
| Механическая рука | 1979 |
|
SU804170A1 |
| Привод штангового скважинного насоса с инерционным уравновешиванием | 1990 |
|
SU1808103A3 |
| Демпфер для подающей каретки штампа | 2020 |
|
RU2756457C1 |
| Робот к штамповочному прессу | 1988 |
|
SU1538966A1 |
| Пневматический демпфер | 1980 |
|
SU973967A1 |
| АДАПТИВНЫЙ ПНЕВМОГИДРАВЛИЧЕСКИЙ ДЕМПФЕР | 2000 |
|
RU2190133C2 |
22
Фиг.г
zJ
