(54) АВТОМАТИЗИРОВАННЫЙ РУЛЕВОЙ ПРИВОД СУДНА
| название | год | авторы | номер документа |
|---|---|---|---|
| АППАРАТУРА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 1998 |
|
RU2144884C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ КУРСОМ СУДНА | 1991 |
|
RU2012919C1 |
| Автоматизированная система управления рулевым приводом судна | 1989 |
|
SU1654132A1 |
| АППАРАТУРА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 2002 |
|
RU2221728C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 1998 |
|
RU2150409C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА С КОМПЕНСАЦИЕЙ МЕДЛЕННО МЕНЯЮЩИХСЯ ВНЕШНИХ ВОЗМУЩЕНИЙ И СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА С КОМПЕНСАЦИЕЙ МЕДЛЕННО МЕНЯЮЩИХСЯ ВНЕШНИХ ВОЗМУЩЕНИЙ | 2014 |
|
RU2564786C1 |
| Устройство для управления движением судна | 1983 |
|
SU1150155A1 |
| АВТОРУЛЕВОЙ С ОЦЕНКОЙ УГЛОВОЙ СКОРОСТИ | 2004 |
|
RU2269451C1 |
| АППАРАТУРА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 2003 |
|
RU2223197C1 |
| Устройство для перестройки параметров авторулевого | 1974 |
|
SU528546A1 |
I
Изобретение относится к судостроению, в частности к автоматизированному рулевому приводу.
Известен автоматизированный рулевой привод судна, содержащий датчик и задатчик курса, подключенные через элемент сравнения к первому входу суммирующего усилителя, датчик угла перекладки руля и электронную модель угловой скорости курса судна, вход которой подключен к выходу датчика угла перекладки руля, а выход - ко второму входу суммирующего усилителя 1. .
Недостатком такого рулевого привода является то, что при наличии инфранизкочастотиых возмущений появляется статическая ошибка вследствие наличия жесткой обратной связи по углу перекладки руля, что снижает точность стабилизации курса судна.
Цель изобретения - повышение точности стабилизации курса судна.
Поставленная цель достигается тем, что автоматизированный рулевой привод судна снабжен двумя блоками формирования производной, входы которых подключены соответственно к выходу датчика угла перекладки руля и второму выходу электронной модели угловой скорости и курса судна, а выходы - соответственно к третьем.у и четвертому входам суммирующего усилителя.
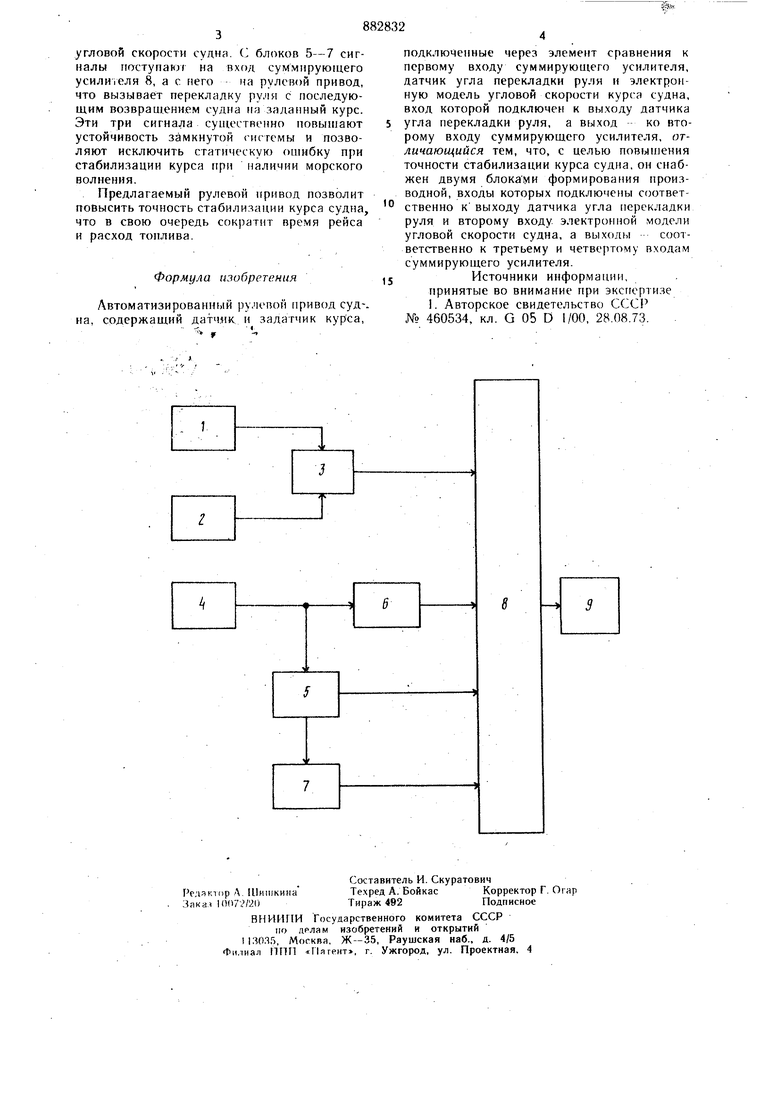
На чертеже изображена схема автоматизированного рулевого привода.
Автоматизированный рулевой привод содержит датчик 1 курса, задатчик 2 курса, элемент 3 сравнения, датчик 4 угла перекладки руля, электронную модель угловой скорости курса судна, блок 5, блоки 6 и 7 формирования производных, суммирующий
10 усилитель 8, рулевой привод 9.
Устройство работает следующим образом.
При отклонении судна от заданного курса сигналы от датчика I курса и задатчика 2 курса приходят в элемент 3 сравнения, где 5 формируется сигнал рассогласования по курсу, который поступает на вход суммирующего усилителя 8. С датчика 4 угла перекладки руля сигнал проходит через блок 6 формирования производной, с этого же датчика 4 сигнал идет через блок 5, где
20 формируется оценка угловой скорости судна, которая затем проходит через блок 7 формирования произвЛднок от оценки сигнала
