(54) ЦИФРОВАЯ СИСТЕМА ПРОГРАММНОГО УПРАВЛЕНИЯ
| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровой электрогидравлический привод | 1979 |
|
SU823665A1 |
| Система числового программногоупРАВлЕНия "TPACCA-Кп | 1979 |
|
SU813371A1 |
| Электрогидравлическая следящая система | 1992 |
|
SU1834993A3 |
| Цифровой электрогидравлический привод | 1978 |
|
SU792002A1 |
| СПОСОБ УПРАВЛЕНИЯ ШАГОВЫМ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2092964C1 |
| Цифровой электрогидравлический привод | 1978 |
|
SU746132A1 |
| Электрогидравлический шаговой привод | 1978 |
|
SU765525A1 |
| Устройство для управления дискретным приводом | 1980 |
|
SU930245A1 |
| Устройство для управления шаговым электродвигателем | 1987 |
|
SU1520647A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ ЦИФРОВАЯ СЛЕДЯЩАЯ СИСТЕМА | 1973 |
|
SU407082A1 |
Изобретение относится к автоматике и вычислительной технике и, в частности к системам, примейяег ы дляуправления приводами металлооб рабатывающих станков, в робототехнике , на мобильных машинах и на др гой специальной технике. Известен электрогидравлический привод с цифровьм управлением, сое трящий из шагового электродвигател к след вдего гидропривода с механической обратной связью tlj. Недостатком такого привода явля ется наличие сложных механических обратных связей с люфтом, трудност получения требуемой величины дискр ности и усилия на перестановку дро селирующего гидрораспредели еля.. Скорость рабочего органа задается частотой управляющих импульсов,поступающих на шаговый электродвигатель, и определяется нагрузкой. Известен также электрогидравлический привод с цифровые управление состоящий из электрогидравлических усилителей сопло-заслонка, гидрораспределителя, датчика обратной связи 12 . Недостатком такой схемы является сложность из-за наличия блоков, позволяющих стыковать дискретную часть с аналоговой и наоборот. Для получения требуемой скорости рабочего органа введена обратная связь по скорости. Известно также электрогидравлическое цифровое устройство регулирования высокой точности для цифрового управления станками, содержащее управляющую программу, с которой поступают управляющие импульсы на шаговый электродвигатель (ШЭД), что вызывает поворот вала ШЭД на фиксированный угол. ШЭД приводит в действие управляющий элемент гидромотора (гидрораспределитель).Гидромотор через кинематические передачи - одноступенчатый редуктор и передачу винт-гайка - обеспечивает подачу на станке. ШЭД и управляющий элемент гидромотора служат в качестве цифро-а.налоговых преобразователей, которые преобразуют подаваемые Hai них управляющие импульсы через гидромотор в движение подачи. При движении рабочего органа станка фактическое значение снимается с цифрового датчика обратной связи, который кинематически связан с рабочим органом станка и подключен каналом обратной связи к управляющей программе. Управляющая программа выполняет сравнение заданного и фактического значения положения рабочего органаИ производит реверс иЭД, что после достижения положения, заданного управляющими импульсами ИЭД, закрывает управляющий элемент гидромотора и, тем самьм, останавливает гидромотор 3 .
Однако известная схема не позволяет осуществить регулирование скорости рабочего органа в широком диапазоне рабочих скоростей, проводить синхронизацию движения двух и более рабочих органов, а также движение двух и более рабочих органов машин с требуемыми и различными наперед заданными скоростями. Уменьшение быстродействия устройства, которое определяется только, быстродействием ШЭД,ограничивается максимально допустимым числом импульсов, которое определяется рабочим ходом управляющего элемента гидромотора. В рассмотренной схеме поступлением определенного числа импульсов с управляющей программы наШЭД происходит движение рабочего органа с максимально возможной скоростью, так как рабочий ход управляющего элемента, в котором происходит регулирование скорости гидромотора, незначителен. Рабочий орган привода движется с максимальной скоростью и только при подходе к заданной точке происходит снижение скорости от максимальной до нулевой за счет реверса ЬВД.Все это ограничивает область применения устройства.
Цель изобретения - значительное расширение области применения систе
Указанная цель достигается тем, что в цифровую систему программного управления, содержащую генератор импульсов и последовательно соединенные блок управления, шаговый электродвигатель , управляющий элемент гидродвигателя, гидродвигатель,цифровой датчик обратной связи и реверсивный счетчик, второй вход которого подключен к информационному выходу блока задания программы, а входы блока управления соединены с выходами элементов К, введены последовательно соединенные функциональный преобразователь, анализатор знака и ограничитель числа импульсов, выход которого подключен к первым входам элементов И, второй вход - к выходу генератора импульсов, третий вход - к управляющему выходу блока задания программы, а четвертые входы - к выходам функционального преоразователя, входы которого соединен с выходами реверсивного счетчика и со вторыми входами анализатора знака, подключенного вторыми выходами ко вторым входам элементов И.
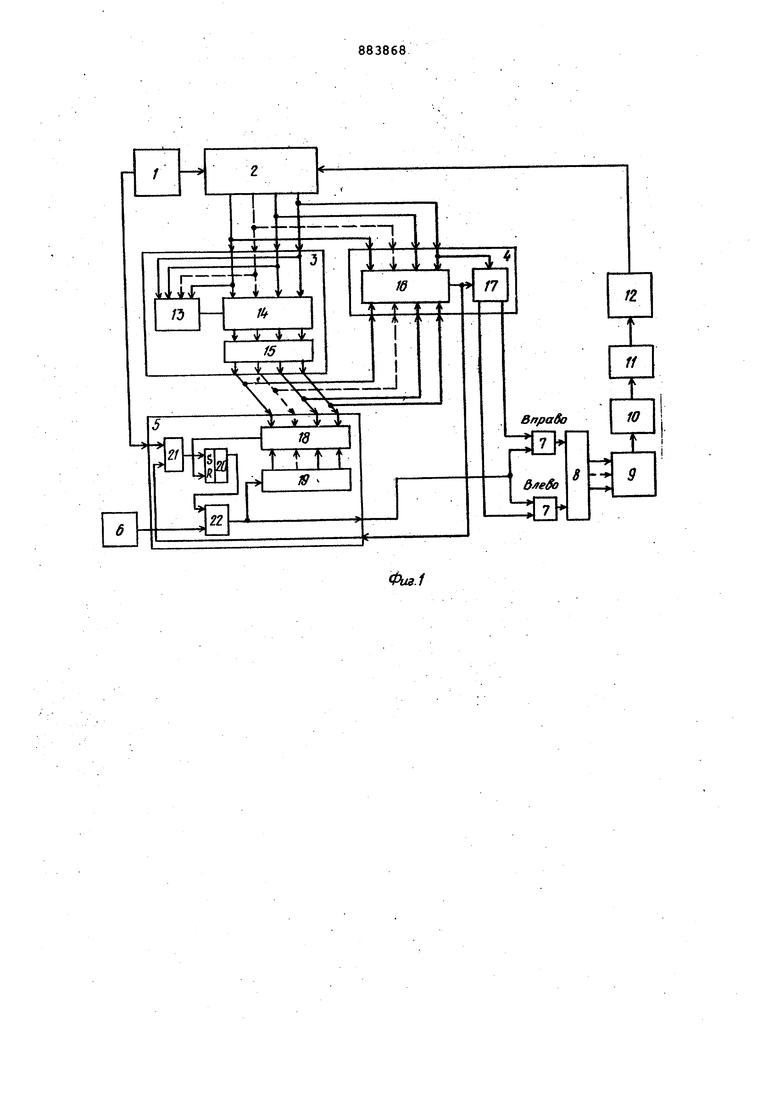
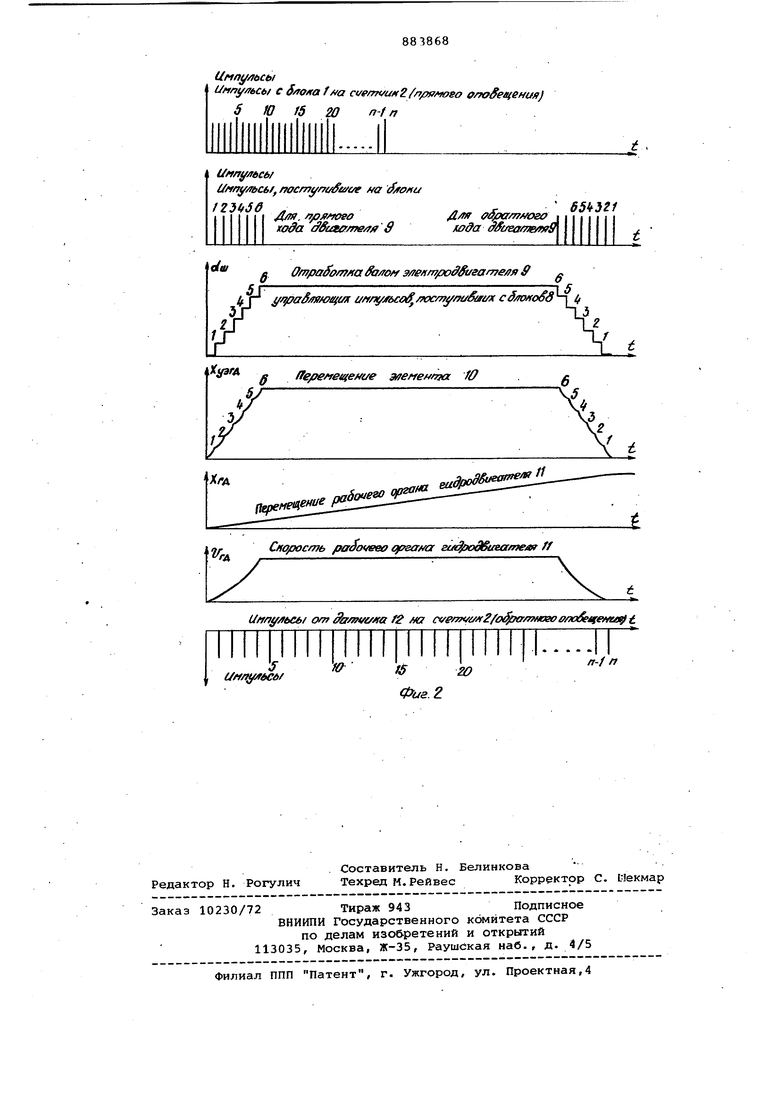
На фиг. 1 представлена схема систем ; на фиг. 2 - временная диаграмма работы отдельных блоков схемы.
Система содержит блок 1 задания программы, реверсивный счетчик 2, J функциональный преобразователь 3, анализатор 4 знака, ограничитель 5 Числа импульсов, генератор 6 импульсов, элементы И 7, блок 8 управления, шаговый электродвигатель
Q 9, управляющий элемент 10 гидродвигателя, гидродвигатель 11 цифровой датчик 12 обратной связи, причем преобразователь 3 содержит блок 13 команд, формирователь 1.4 функции и блок 15 памяти, анализатор 4 5 блок 16 сравнения кодов и блок 17 знака, а ограничитель 5 - блок 18 сравнения кодов, счетчик 19 импульсов, RS-триггер 20, элемент ИЛИ 21 и элемент И 22.
0 Система работает следующим образом.
С блока 1 на счетчик 2 поступают управляющие импульсы с максимальной частотой, число которых определяет
5 положение рабочего органа гидродвигателя 11. С выхода счетчика 2 код положения поступает на преобразователь 3 и анализатор 4. Преобразователь 3 формирует код управления огQ раничителем числа импульсов в соответствии с кодом положения и выбранным законом управления следующим образом.
Формирователь 14 после того, как
. в счетчик 2 записан код заданного перемещения, производит один цикл формирования, функции, в результате которого в блок 15 записывается код величинь открытия управляклцего элемента гидродвигателя. Следующий
0 цикл формирования производится после обработки предыдущего задания и поступления нового кода в счетчик 2. Таким образом преобразователь 3 формирует код отклонения управляющего
5 элемента гидродвигателя один раз для каждого нового значения заданного перемещения, причем запуск формирователя 14 осуществляется по управляющему входу импульсом, формируемым
0 блоком 13, который, в свою очередь, формирует этот управлякяций импульс при записи нового кода заданного перемещения.
В процессе обработки гидродви-гаf телем заданного перемещения и списывания кода в счетчике 2 код на входе преобразователя 3 изменяется. Однако вследствие отсутствия управляющего импульса на управляющем входе формирователя 14 выходной код, записанный в блоке 15,остается прежним в течение всего цикла отработки. При этом анализатор 4 сравнивает значение этого кода с текущим значением кода в счетчике 2 и формирует сигналы управления элементами И и ограничителем 5 при их равенстве, а число импульсов, проходящих через ограничитель 5, соответствует данному коду управления и определяет вели1чину перемещения элемента 10.
При наличии разрешающего сигнала на первом или втором управляющем входе ограничителя 5, этот сигнал проходит через элемент ИЛИ 21 на S-вход RS-триггера 20, на прямом выходе которого устанавливаются единичный сигнал, поступающий на первый вход элемента .И 22. На второй вход элемента И 22 поступают импульсы с генератора 6 через вход ограничителя По существу элемент И 22 выполняет функцию управляемого ключа, т.е. пропускает на выход импульсы с генератора б при Наличии соответствующего сигнала на первом входе. С выхода элемента И 22 импульсы поступают на вход ограничителя 5 и на счетный вход счетчика 12, который подсчитывает их.
В результате на разрядных выходах счетчика 19 получаем число прошедших на выходе импульсов, например в двоичном коде, который сравнивается с кодом, поступающим с формирователя кода в блок 18. При их равенстве на выходе этого блока 18 формируется сигнал, возвращающий RS-триггер 20 в исходное состояние. На прямом выходе триггера 20 устанавливается нулевой сигнал, запрещающий прохождение импульсов на выход ограничителя 5.
Таким образом на блок 8 поступает число импульсов, определяемое кодом, сформированным преобразователем 3. Это число определяет угол поворота вала электродвигателя 9 и следовательно, величину открытия управляющего элемента 10 гидродвигателя 11.
Движение рабочего органа гидродвигателя 11 через кинематическую связь приводит к движению датчика 12, с которого на счетчик 2 поступают импульсы обратной связи, которые списывают код, поступивший с управляющей программы на счетчик 2.
Рабочее движение органа гидродвигателя 11 происходит с постоянной скоростью, так как управляющий элемент 10 гидродвигателя 11 смещен на строго постоянную величину, и до тех пор пока число импульсов при стирании на счетчи ке 2 не сравняется с числом импульсов заданных преобразователем 3 на ограничитель 5. При совпадении числа импульсов анализатор 4 (с помощью блока 16) подает команду на запускающий вход ограничителя 5 и на соответствующий элемент И 7, что вызывает прохождение управляющих импульсов с генератора 6 через ограничитель 5 на блок 8 и реверс электродвигателя 9. Последний
вызовет одновременно и возврат элемента 10 гидродвигателя 11 в исходное положение таким образом, что к моменту окончания перемещения рабочего органа в заданное положение J вал электродвигателя 9, следовательно, и элемент 10 возвращается в исходное положение. При необходимости конструктивных ограничений величин рабочих перемещений, выходящих за преQ делы рабочих Феодов управляющих элементов 10 гидродвигателя,подача управляющих импульсов на электродвигатель 9 выше максимального количества невозможна из-за наличия ограничителя 5, настроенного по верхнему пределу
5 на это максимально допустимое количество.
Использование в схеме новых блоков позволяет производить от управляющей программы управление положением рабочего органа с соответствующей скоростью. В результате расширен диапа- зон рабочих скоростей и повышена точность позиционирования, которая определяется только датчиком обратной
5 связи, что позволит увеличить сферу применения системы в различных областях техники.
Формула изобретения
Цифровая система программного управления, содержащая генератор импульсов и последовательно соединенные блок управления, шаговый электродвигатель, управляющий элемент гидродвигателя, гидродвигатель, цифровой датчик обратной связи и реверсивный счетчик, второй вход которого подключен к информационному выхблу блока задания программы, а входы блока управления соединены с выходами элементов И, отличающаяся тем, что, с целью расширения области применения системы, в нее введены последовательно соединенные функциональный преобразователь, анализатор знака и ограничитель числа импульсов, выход которого подключен к первым входам . элементов И, второй вход - к выходу генератора импульсов, третий вход - к управляющему выходу блока задания программы, а четвертые входы - к выходам функционального преобразователя , входы которого соединены с выходами реверсивного счетчика и со вторыми входами анализатора знака, подключенного вторыми выходами ко вторым входам элементов И.
Источники информации, принятые во внимание при экспертизе
I с. 64, рис. 47.
кл. 42 г -19/18, опублик. 1969 (прототип) .
Цмпуаьсы
импуабсы с f/ro/ra /лет cvefrrvuffZ/rr/Tff/wso о/то ецвния) 5 Ю f5 20 n-f п
импульсы
i(fmy/K C6/, nocfnyfTufufc/e на tf/roffu
Доя. npjrftoeo
хода ffcaa/TK/r/f S
л Ompa omffaffa/ro 1еят/ю игате я$ g
(ca i/fffx jK coff /x c/nym/&ffiffs cdnvfoffS - V s /
ff ffe freuieffue эаененпхх fO
5/
ХЛА
УСяаросгт, pa otxeo qpsafoz гс/фод8иеател г //
/A
Ufrnff bCAi от ffamve/xa f2 ла cvefT f/ Z o mMoaoono&tfewa
5
«
и / /Г6СА/
п-i n
Фиг. г
