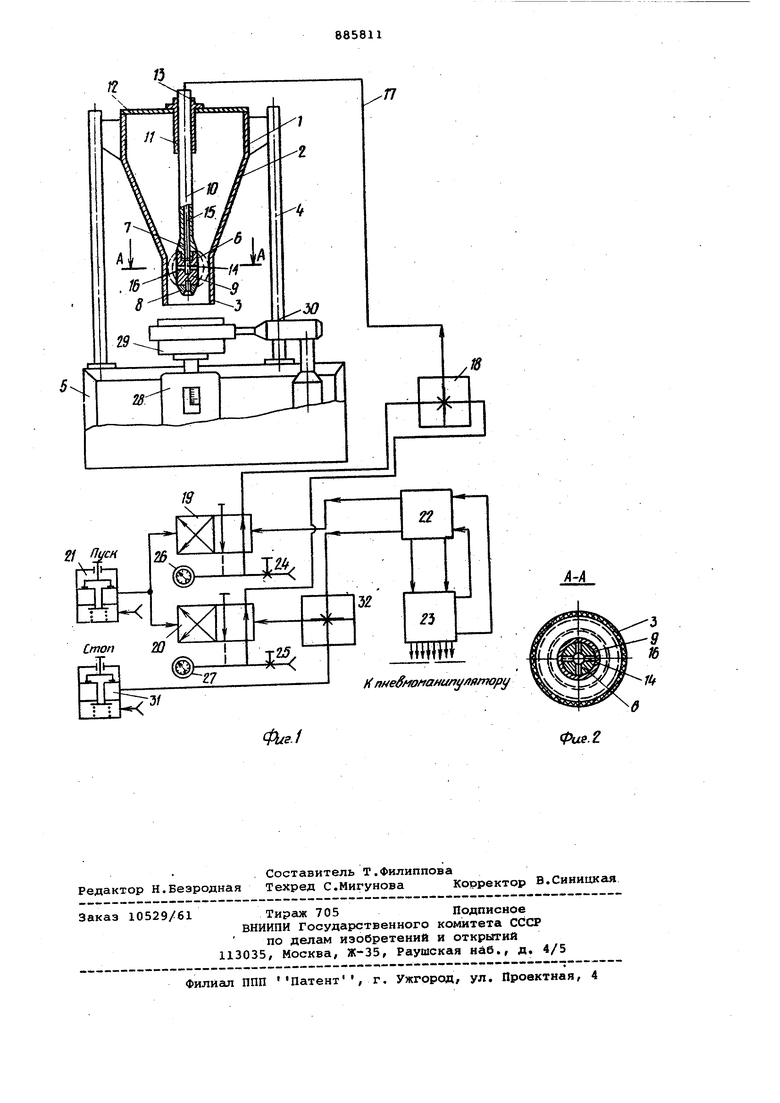
переходящую в выпускной патрубок 3. Бункер жестко закреплен с помощью вертикальных стоек 4 на станине 5. . Регулятор расхода выполнен в виде п лого цилиндра 6 с коническими основа ниями 7 и 8, на боковой поверхности которого герметично закреплена элас тичная оболочка,9 из резины. Конус 7 установлен на полой вертикальной штанге 10, помещенной внутри втулки 11, закрепленной на крышке 12 ра ходного бункера. Положение штанги относительно стенок бункера регулируется с помощью регулировочного винта 13. Цилиндр б имеет вертикальное отверстие 14, совмещенное с отверстием 1 в штанге 10 и сообщающееся с радиал ными каналами 16, через которые осу ществляется подвод воздуха, к эластич ной оболочке 9. Внутренняя полость эластичной оболочки 9 через каналы 14, 15 и 16 по пневмопроводу 17 сообщается с выходом логического -элемента ИЛИ 18, входы которого связаны с питающими выходами воздухораспределителей 19 и 20. Одни управ- i ляющие входы воздухораспределителей 19 и 20 связаны общей пневмотрас сой с кнопкой ПУСК 21, другие управляющие полости воздухораспределителей 19 и 20 функционально связаны с выходом блока 22 датчиков. Блок 2 датчиков связан также С блоком 23 управления. Величина подводимого к зластичной оболочке 9 давления сжатого воздуха регулируется с помощью задатчиков 24 и 25 и контролируется по манометрам 26 и 27. Устройство для дозирования снабже но весовым устройством 28 с .приемной емкостью 29, установленной на его платформе. Чувствительный элемент весового устройства 28 имеет возможность бесконтактного взаимодей ствия с блоком 22 датчиков, что обес печивается конструктивным исполнением (не показано). Для выгрузки отвешанной порции устройство снабжено пневматическим манипулятогэом 30, приводимым в Действие по командам блока 22 датчи ков при помощи блока 23 управления. Дйя аварийной остановки подачи мате риалов в приемную емкость 29 введен кнопка СТОП 31/ выход которой связа через логический элемент ИЛИ 32 с управляющим входом воздухораспределителя 20, На чертеже показано пунктирной линией, как деформируется эластичная оболочка при переходе с интенсивной на тонкую подачу i и при- прекращении подачи сыпучего Материала по команде блока 22 датчиков. Устройство работает следующим образом. Перед загрузкой нажимается кнопка СТОП 31, Воздухораспределитель 20 через логический элемент ИЛИ 32 переключается, при этом сжатый воздух поступает на один из входов логического элемента ИЛИ 18 и затем по пневмопроводу 17 через полую вертикальную штангу 10 по каналам 14, 15 и 16 к эластичной оболочке 9, которая, деформируясь, герметично перекрывает выпускное отверстие. После этого-загружается бункер дозируемым материалом. Нснимается кнопка ПУСК 21. При этом воздухораспределители 19 и 20 переключаются в такое положение, при котором их питающие выходы соединены через логический элемент ИЛИ 18 с внутренней полостью эластичной оболочки 9 и сообщаются с атмосферой. Сжатый воздух из внутренней полости эластичной оболочки 9 сбрасывается в атмосферу, и выпускное отверстие полностью открывается. Дозируемый материгш интенсивным потоком поступает в приемную емкость 29. По мере наполнения приемной емкости чувствительный элемент весового устройства бесконтактно шзаимодействует с одним из датчиков блока 22 датчиков. В результате с выхода блока 22 датчиков появляется управляющий сигнал, переключающий воздухораспределитель 19. Выходной сигнал с него, определенного, заранее установленного уровня, поступает на один из входов логического элемента ИЛИ 18 и через его выход по каналу связи во внутреннюю полость оболочки 9. Последняя, деформируясь под действием сжатого воздуха, приобретает форму тела вращения/ близкую к эллипсоиду, определенных геометрических размеров, соответствующих установленному уровню давления. Площадь выпускного отверстия уменьшается, и дозируемый материал менее интенсивным потоком поступает в приемную емкость, т.е. в режиметонкой сыпи. После достижения необходимого веса дозируемого продукта в приемной емкости чувствительный элемент весового устройства взаимодействует со вторым датчиком. В результате с блока 22 датчиков появляется управляющий сигнал, который через логический элемент ИЛИ 32 переключает воздухораспределитель 20. При этом выходной сигнал с него поступает через ло ический элемент ИЛИ 18 к эластичной оболочке 9, вызывая ее деформацто до диаметра, превышающего немного диаметр выпускного отверстия, и вызывая тем самым отсечку потока сыпучего материала. Этот же управлякяцйй сигнал с блока 22 датчиков отрабатывается блоком 23 управления который приводит -в действие пиевмоманипулятор; 3Q, осуществлякадий снятие приемной емкости с весового
устройства 28, транспортировку и выгрузку. Затем емкость в обратном порядке ставится на платформу весо вого устройства 28 и цикл нажатием; кнопки ПУСК 21 может быть повторен .
Таким образом, применение в предлагаемом устройстве регулятора расхода в виде полого цилиндра с коническими основаниями, обтянутого эластичной оболочкой, приобретающей при.подведении- сжатого воздуха, форму; близкукх к эллипсоиду, способствует формированию в кольцевом пространстве между оболочкой и бункером высокоравномерных потоков. Причем высокая равномерность сохраняется при различных степенях деформации оболочки, что позволяет ввести двухрежимную подачу дозируемого материала, и тем самым., повысить точность дозирования продуктов, различгиоцихся как по гранулометрическому составу, так и по насыпаемой массе.
Формула изобретения
1. Устройство для дозирования, порошкообразных материаловг содержащее расходный конический бункер с выпускным цилиндрическим -патрубком в нижней части, регулятор расхода с эластичным запорным элементом, соединенный пневмопроводом.с пневматической системой управления,- о т л rf чающееся тем, что, с целью {ювышения точности дозирования ма- . териалов, различающихся по гранулометрнческ(М1«у составу, в него введено весовое устройство с блоком датчиков, а регулятор р 1схода. установлен в зон перехода конического.бункера в цилиндрический патрубок- и соединен
iiepea логический элемент ИЛИ с воздУг хораспределнтелями, у KOTOI U одни. яз управляющих входов соединены с хнопкой. управления, а другие функционгшьно. связаны с выходги и блока датчиков весового устройства.
2. Устройство по п. 1, о т..л ичающееся тем, что регулятор расхода выполнен в виде укрепленного на штанге полого цилиндра. с коническими основаниями.
3. Устройство поп. 1, о т л ичающееся тем, что один из управляющих входов воздухораспредвлит теля соединен с кнопкой аварийной остановки через логический элементИЛИ
Источники инфоцшации,
принятые во внимаиие при экспертизе . 1. Патент анции I 2344818,
кл. G 01 11/00, 197. 2. Авторское свидетельство СССР №619798, кл. G 01 F 11/34,1978 (прЬтотип).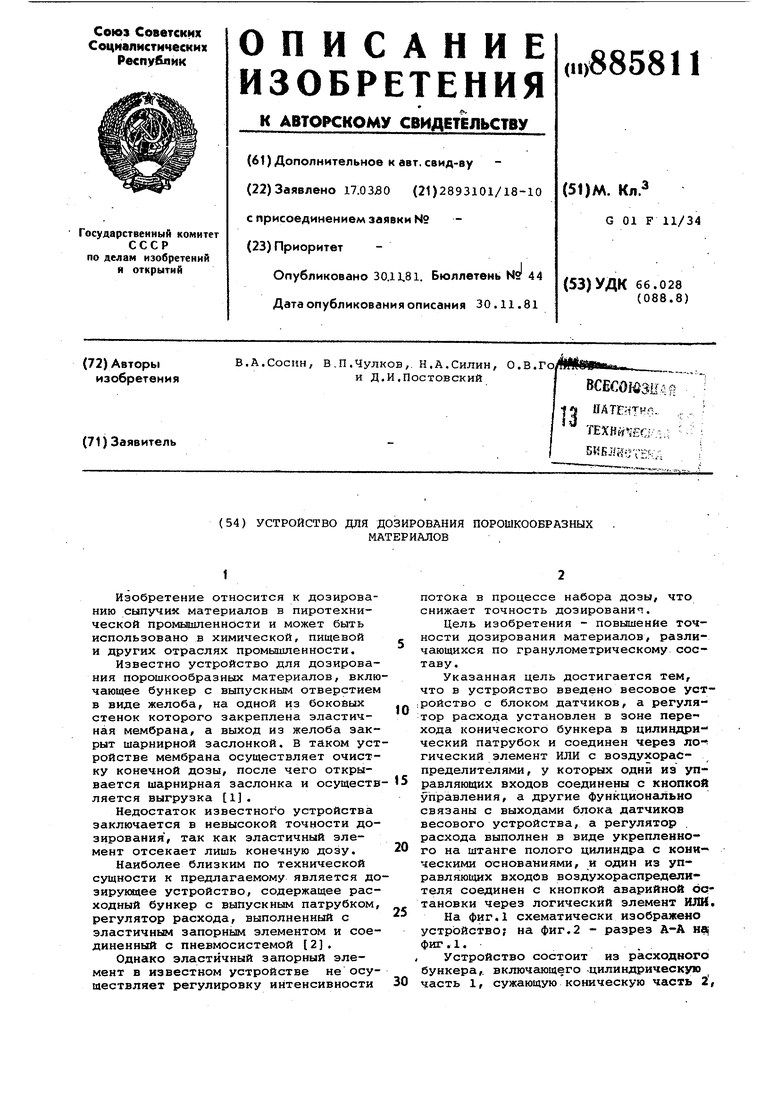
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для пневмотранспортирования сырьевых материалов | 1988 |
|
SU1532476A1 |
| Индивидуальный дозатор корма в зависимости от величины надоя | 1985 |
|
SU1416090A1 |
| Устройство для дозирования сыпучих материалов | 1982 |
|
SU1115029A1 |
| Автоматический объемно-весовой дозатор | 1970 |
|
SU1841250A1 |
| Автоматический весовой дозатор жидкостей периодического действия | 1984 |
|
SU1167441A1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ РЕАКТОРОМ ПОЛУНЕПРЕРЫВНОГО ДЕЙСТВИЯ | 2005 |
|
RU2294237C2 |
| СПОСОБ ОБЪЁМНОГО АВТОМАТИЧЕСКОГО ДОЗИРОВАНИЯ СЫПУЧИХ МАТЕРИАЛОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2019 |
|
RU2733486C1 |
| Пневматическое управляющее устройство | 1982 |
|
SU1043588A1 |
| УСТРОЙСТВО СМЕШЕНИЯ И ДОЗИРОВАНИЯ ЖИДКИХ КОМПОНЕНТОВ В ЗАДАННОМ СООТНОШЕНИИ | 2021 |
|
RU2767588C1 |
| Способ управления процессом весового порционного дозирования сыпучих материалов | 1987 |
|
SU1500852A1 |