00 00 О5
со
vj
Изобретение относится к обработке металлов давлением, в частности к оборудованию для гибки профилей.
Известна двухроликовая машина, содержащая станину с смонтированным в ней валами гибочных роликов, расположенных консольно, связанными с Т леханизмом регулировки и вращения Гц.
Мамина имеет два рабочих ролика: жесткий меньшего диаметра и покрыты упругим материалом большего диаметра. Вал жесткого ролика расположен на подшипниках в обойме поворотного рычага, связанного с приводом его поворота. Ролик с упругим покрытием закреплен на валу, установленном на подшипниках в обойме, закрепленной в станине, и через цепну передачу и редуктор связан с приводом вращения. Машина имеет механизм регулировки угла поворота рычага с жестким роликом.
Недостатком такой машины является расположение опорных подшипников валов рабочих роликов в одном жестком корпусе, что приводит к значительному увеличению их габаритов, обусловленному необходимостью компенсации консольной нагрузки значительной величины, действующей на ролик в процессе гибки. Увеличенные габариты корпусов ограничивают величину сближения рабочих роликов, что обусловливает ограничение минимальных радиусов гибки, определяемых величиной внедрения жесткого ролика в упругое покрытие ролика большего диаметра, и тем самым Ограничиваются технологические возможности машины, характеризуемые наименьшими радиусами кривизны из-) делий, которые можно получить на этой машине.
Кроме того, регулировка угла поворота рычага с жестким роликом, характеризующая величину его внедрения в упругое покрытие и тем самым получаемый радиус гибки, возможна только при отведенном рычаге в исходное положение. Это также ограничивает технологические возможности машины, так как исключает возможность получения изделий переменной кривизны.
Целью изобретения является обеспечение возможности гибки изделий переменной кривизны путем бесступенчатой регулировки перемещения Жесткого ролика.
С этоГ целью вал жесткого ролика связан с приводом его перемещения посредством винтовой пары, гайка которой соединена равноплечим трехзвенным четырехшарнирным механизмом с тягами, закрепленными на валу этого ролика, а валы обоих роликов связаны между собой двумя поворотными рычагами с общей осью вращения, расположенной параллельно осям валов.
На чертеже изображена кинематическая схема машины. Машина содержит станину 1, в которой на валу 2, установленном на подшипниках 3 и связанном с приводом вращения, консольно смонтирован ролик 4 большего диаметра,
покрытый упругим материалом (например, пОлиуретаЙом). Вал 5 жесткого ролика 6.меньшего диаметра связан с валом ролика 4 двумя рычагами 7 и 8 с общей осью вращения и через
отдельную подшипниковую обойму 9 с тягами 10, которые,в свою очередь, через равноплечий трехзвенный четырехшарнирный механизм с осями 11, 12, 13 и 14 шарниров и подвижными звеньями 15 и 16 связаны с гайкой 17 ходового винта 18. Последний связан с приводом перемещения.
Машина работает следующим образом.
Заготовка-19 устанавливается между рабочими роликами 4 и б в заданное положение. Включается привод перемещения (на чертеже не показан) верхнего ролика 6, который вращает винт l8. При этом гайка 17, перемещаясь по винту 18 вправо, перемещает связанную с ней ось 13, поворачивая звено 15 равноплечего трехзвенного четырехшарнирного механизма по часовой стрелке, и через общую ось 12 поворачивает против часовой стрелки второе звено 16 относительно неподвижной оси 14, Угол между звеном 16 .и .нижней половиной звена 15 увеличивается, при
этом увеличивается и расстояние
между неподвижной осью 14 и подвижной осью 11. Последняя, перемещаясь прямолинейно вниз, перемещает через тяги 10 обойму 9 вала 5 верхнего ролика 6. При перемещении вниз ролик 6, выполняющий функцию вращающегося пуансона, вместе с изгибаемой заготовкой 19 внедряется на определенную заданную величину,
определяющую требуемый радиус гибки,
в упругое покрытие нижнего ролика 4, выполняющего функцию упругой матрицы.
При перемещении вала 5 ролика 6 вниз рычаги 7 и 8, связывающие валы 5 и 2 роликов б и 4, поворачиваются вокруг осей вращения (складываются) , обеспечивая паргшлельное перемещение вала 5 верхнего ролика 6 относительно вала 2 нижнего ролика 4 вследствие того, что ось отверстия рычага 7, в котором вращается вал 5 верхнего ролика б, и ось отверстия рычага 8, в котором вращается ваш 2 нижнего ролика 4,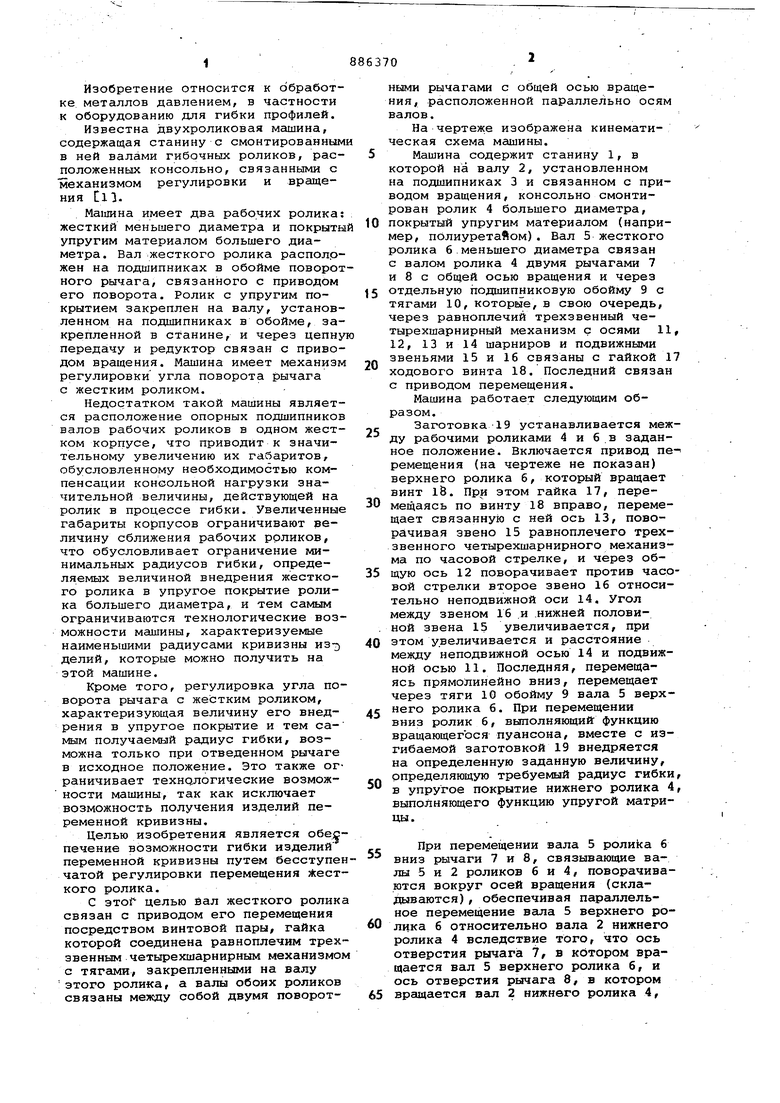

| название | год | авторы | номер документа |
|---|---|---|---|
| ТРЕХВАЛКОВАЯ ЛИСТОГИБОЧНАЯ МАШИНА | 2001 |
|
RU2200070C1 |
| Устройство для суперфинишной об-РАбОТКи дЕТАлЕй | 1979 |
|
SU841927A1 |
| Устройство рубки движущейся ленты древесного шпона с ножом и узлом его натяжения, включая механизм вертикального перемещения прижимного вала с натяжителем цепи | 2021 |
|
RU2807977C2 |
| УСТРОЙСТВО ДЛЯ ШАГОВОЙ ПОДАЧИ ДЛИННОМЕРНОГО МАТЕРИАЛА | 1991 |
|
RU2035250C1 |
| МАШИНА ДЛЯ ШТАМПОВКИ СЕТКИ ИЗ ЛИСТОВОГО МАТЕРИАЛА | 2001 |
|
RU2202428C2 |
| РЕВЕРСИВНЫЙ ПРОКАТНЫЙ СТАН | 1996 |
|
RU2112614C1 |
| Устройство для суперфинишной об-РАбОТКи | 1979 |
|
SU841934A1 |
| РЫЧАЖНЫЙ ВАРИАТОР | 2011 |
|
RU2467227C1 |
| КРИВОШИПНЫЙ МЕХАНИЗМ ПЕРЕМЕННОГО РАДИУСА | 2003 |
|
RU2238455C1 |
| Вариатор скорости | 1987 |
|
SU1539433A1 |
МАШИНА ДЛЯ ГИБКИ ПРОФИЛЕЙ, содержащая консольно установленные на станине .один под другим ролики, верхний из которых выполнен жестким, а нижний - с упругим покрытиIi :Vi.Of«,, Se(;4(., ем, и привод перемещения верхнего ролика относительно нижнего, отличающаяся тем, что, с целью обеспечения возможности гибки изделий переменной кривизны путем бесступенчатого регулирования перемещения жесткого ролика, его вал связан с приводом его перемещения посредством винтовой пары, гайка которой соединена равноплечим трехзвённым четырехиарнирным механизмом с тягами, закрепленными на валу этого ролика, а валы обоих роликов сз-язаны между собой двумя поворотными рычагами с общей осью вращения, расположенной параллельно осям валов.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Патент Англии № 1190884, кл | |||
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Кинематографический аппарат | 1923 |
|
SU1970A1 |
