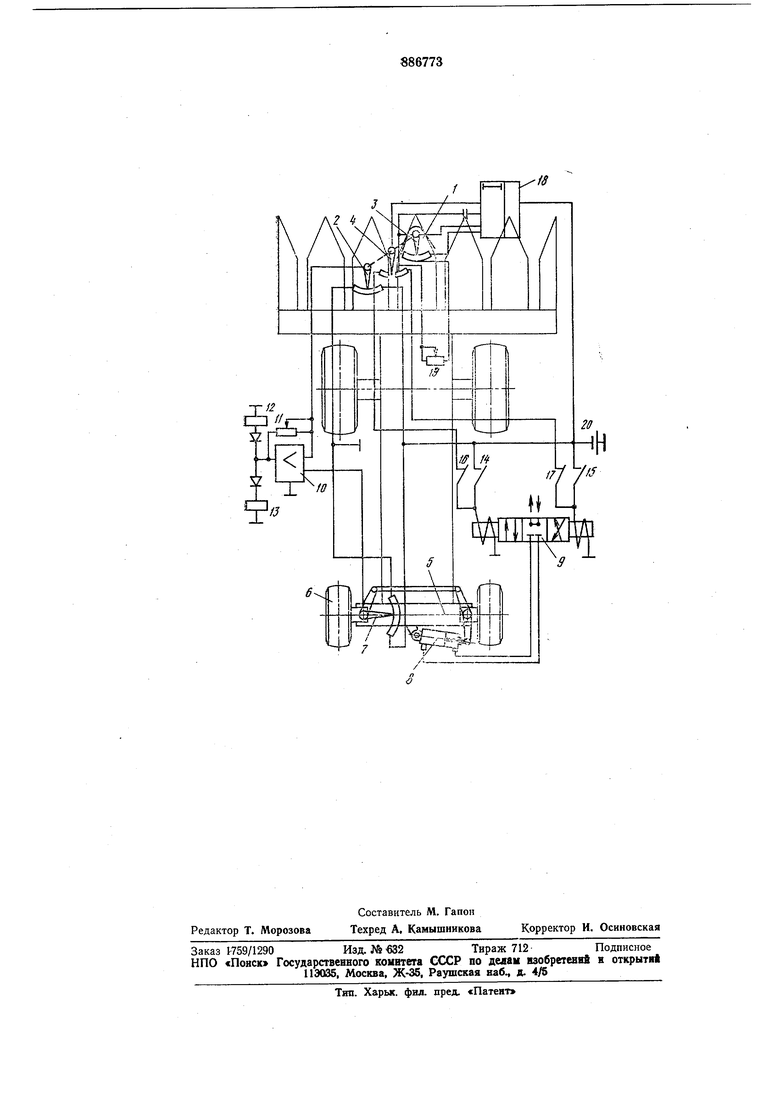
преобразователем 9. Преобразователи 2 и 7 соединены в мостовую схему, в измерительную диагональ этого моста включен усилитель 10 -с .регулятором 11 чувстаятельности. К выходу усилителя 10 подключены переключающие механизмы 12, 13, каждый из которых срабатывает при определенной полярности выходного сигнала усилителя 10. Переключающие механизмы 12 и .13 управляют постоянно разомкнутыми элементами 14, 15 и постоянно замкнутыми 16, 17. Элементы 16, 17 включены в электрическую цепь через релейный электрический яреобразователь 4 и управляемый элемент 18 выдержки времени.
Управляющими о.рганами элемента 18 являются измерительный преобразователь 3 перемещения и орган 19 ручной настройки. Питание всей электрической части устройства осуществляется от источника 20 питания.
Устройство работает следующим образом.
При движении машины щуп 1 находится между убираемыми рядками. Если комбайн откло:нит1ся от рядка, щуп 1,поворачивается и перемещает преобразователи 2, 3 и 4, при этом в диагонали мостовой схемы, образаваиной преабразователями 2 и 7, появляется электрический -сигнал определенной полярности, включается один из переключающих механизмов 12 или 13, который осуществляет включение управляемого им разом,к,Н1утого элемента 14, 15 или выключение управляемого им замкнутого элемента 16, 17. При этом электрогидропреобразователь 9 начнет подачу рабочей жидкости к гидроцилиндру 8. Как только произойдет поворот управляемых колес 6 на угол, при котором разбаланс моста меньше зоны нечувствительности измерительной схемы, переключающий механизм 12, 13 отключится, после чего при размыкании элементов 14, 15 и замыкании элементов 16, 17 электрическая цепь будет готова для переклк чения електрагидропреобразователя 9 на подачу рабочей жидкости для возврата колес в среднее положение, что произойдет через интервал времени, задаваемый элементом 18 выдержки времени. Причем интервал времени тем больший, -чем больще отклонение управляюшего органа преобразователя 3 от среднего положения.
При правильном выборе зоны нечувствительности и задержки времени включения сигнала на возврат колес в среднее положение фактический поворот комбайна происходит без запаздывания или опережения в сравнении с движением чувствительного элемента направления движения, чем и обеспечивается точное движение комбайна
вдоль убираемых рядкоов.
Формула изобретения
Устройство для автоматического вождекия самоходных машин вдоль заданной траектории, содержащее пропорциональные измерительные преобразователи положения щупа, электрическую схему сравнения сигналов измерительных преобразователей,
усилитель, электрогидропреобраз1ователь и гидравлический исполнительный механизм, отличающееся тем, что, с целью повышения точности вождения, оно снабжено управляемым элементом выдержки времени и релейным электрическим преобразователем положения щупа чувствительного элемента направления движения, который подключен через электрическую cxewv сравнения и управляемый элемент выдерж
ки времени к электрогидропреобразователю, при этом управляющим органом элемента выдержки времени является пропор циональный измерительный преобразователь положения щупа чувствительного элемента направления движения.
Источники информации, принятые во внимание при экспертизе:
1. Авторское свидетельство СССР № 127085, кл. А 01 В 69/04, 1959.
2. Патент Франции № 2201816, кл. А 01 В 69/04, 1973 (прототи1п).
| название | год | авторы | номер документа |
|---|---|---|---|
| Адаптивная автоматическая система вождения самоходных уборочных машин вдоль убираемых рядков | 1981 |
|
SU1007572A1 |
| Способ автоматического вождения самоходной уборочной машины по рабочей длине гона | 1980 |
|
SU952121A1 |
| Устройство для автоматического вождения самоходного комбайна вдоль подбираемого валка | 1981 |
|
SU988213A1 |
| Копирующее устройство для автоматического вождения сельскохозяйственной машины по борозде | 1981 |
|
SU959649A1 |
| Устройство для автоматического направления движения самоходной сельскохозяйственной машины | 1980 |
|
SU948308A1 |
| Система автоматического направления технологических рабочих органов сельскохозяйственной машины | 1983 |
|
SU1165251A1 |
| Устройство для автоматической раз-гРузКи гидРОКлАССифиКАциОННыХ АппА-PATOB | 1979 |
|
SU812346A1 |
| Устройство для коррекции положения рабочих органов культиватора | 1988 |
|
SU1605954A1 |
| Автоматическое самонастраивающееся устройство для поддержания оптимальной нагрузки картофелеуборочного комбайна | 1977 |
|
SU919626A1 |
| Гидромеханическое устройство для автоматического вождения сельскохозяйственной машины по борозде | 1988 |
|
SU1604184A1 |