СП
ND
Изобретение относится к сельскохозяйственному машиностроению, в частности к автоматическим системам вождения самоходных уборочных машин вдоль убираемых рядков растений.
Известна адаптивная автоматическая система вождения самоходных уборочных машин вдоль убираемых рядков, содержащая пропорциональные и релейные электропреобразователи, механически связанный с ними копир-водитель, схему с управляемыми элементами выдержки времени на автоматический возврат управляемых колес в среднее положение, исполнительный механизм управления выдержкой времени, орган управления выдержкой времени и блок поисковой адаптации 1.
Недостатком известного устройства является неполная адаптация к изменяюш,имся условиям работы. При изменениях состояний поля, ВЛИЯЮШ.ИХ на отставание фактического курсового угла от угла поворота управляемых колес (механический состав, влажность, плотность поверхностного слоя и др.), а также при изменениях технического состояния ходовой части и рулевого управления уборочной машины (нарушения первоначальных регулировок) необходимо изменять интервал выдержки времени на возврат управляемых колес в среднее положение, а так как перечисленные факторы могут изменяться в больших пределах не только в течение одного уборочного сезона, но и в течение одной смены, возникает необходимость полной автоматизации процесса настройки системы на оптимальный режим работы.
Цель изобретения - повышение точности вождения.
Поставленная цель достигается тем, что блок поисковой адаптации содержит логические элементы выдержки времени на появление и пропадание входного сигнала, элементы И, ИЛИ, ждушие мультивибраторы и электронные усилители, при этом входы элементов выдержки времени на появление и пропадание входного сигнала соединены с выходами релейного электропреобразователя и соответственно вход первого - со вторыми входами первого и четвертого элементов И, вход второго - с вторыми входами второго и третьего элементов И, а выходы элементов выдержки времени на появление и пропадание входного сигнала соединены соответственно выход первого - с первыми входами первого и третьего элементов И, выход второго - с первыми входами второго и четвертого элементов И, причем выходы первого и второго элементов И соединены с входами первого элемента ИЛИ, выходы третьего и четвертого элементов И - с входами второго элемента ИЛИ, выходы элементов ИЛИ - с входами соответствующих ждущих мультивибраторов, выходы которых посредством электронных усилителей подключены к входам исполнительного механизма управления выдержкой времени.
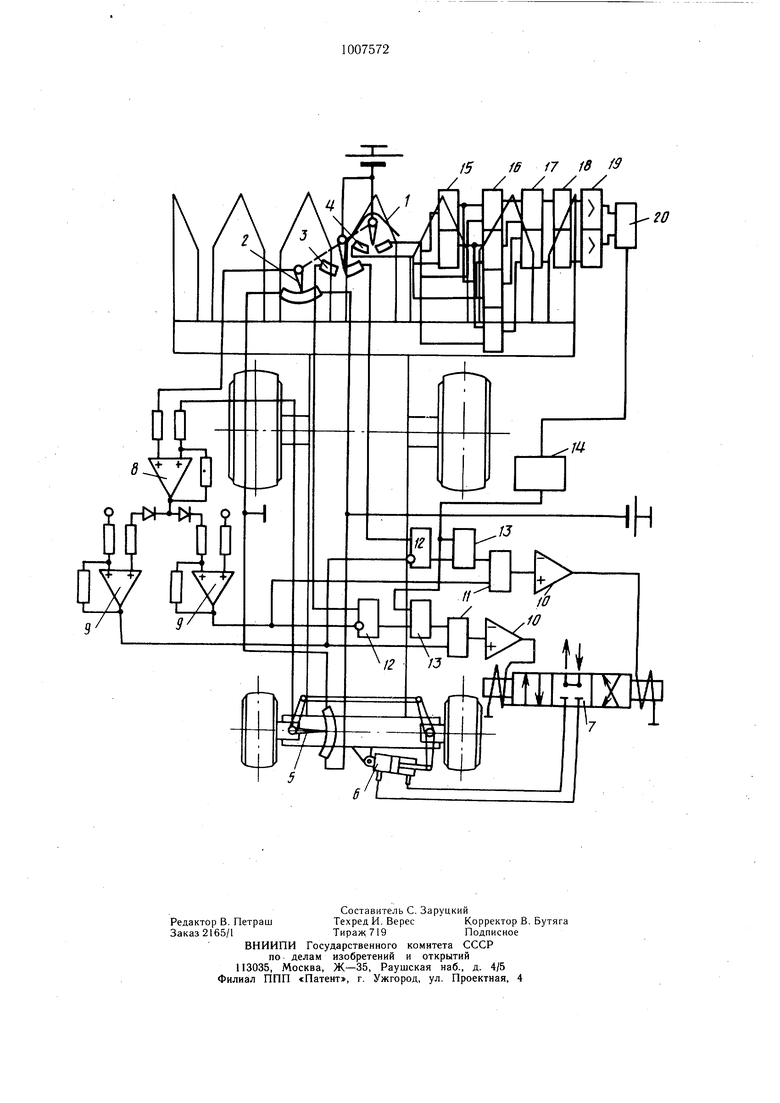
На чертеже изображена структурная схема устройства.
Устройство содержит копир-водитель 1, механически связанный с пропорциональным электрическим преобразователем 2 перемещения копира-водителя 1 в электрический сигнал, релейным электропреобразовате0 лем 3 для включения сигнала на возврат управляемых колес в среднее положение и релейным электропреобразователем 4 отклонений копира-водителя 1 из среднего положения. На мосту управляемых колес установлен электрический измерительный
5 преобразователь 5 угла поворота управляемых колес и гидроцилиндр 6 исполнительного механизма, соединенный с электрогидропреобразователем 7. Электропреобразователи 2 и 5 соединены в мостовую схему сравнения, в которую включен усилитель 8 и два разнополюсных дискриминатора 9. Каждая катушка электрогидропреобразователя 7 соединена через усилитель 10 и элемент ИЛИ 11 с обоими дискриминаторами 9 двумя цепочками - одной цепочкой
5 непосредственно, а второй цепочкой через элемент 12, реализующий функцию «Запрет и управляемый элемент 13 выдержки времени. В элементе «Запрет 12 запрещающим сигналом являются сигналы дискриминатора 9 второй цепочки, а каждый их прямой
0 вход соединен с одним из выходов релейного электропреобразователя 3. Вторая катушка электрогидропреобразователя 7 соединена аналогично.
Управление элементами 13 выдержки вре5 мени осуществляется блоком поисковой адаптации через орган 14 управления. Блок поисковой адаптации содержит логические элементы 15 выдержки времени на появление и пропадание входного сигнала, элеQ менты И 16, ИЛИ 17 ждущие мультивибраторы 18 и электронные усилители 19. Входы элементов 15 выдержки времени на появление и пропадание входного сигнала соединены с выходами релейного электропреобразователя 4; соответственно вход первого - с вторыми входами первого и четвертого элементов И 16, вход второго - с вторыми входами второго и третьего элементов И 16, а выходы элементов 15 выдержки времени на появление и пропадание входного сигнала соединены соответственно выход первого - с первыми входами первого и третьего элементов И, вы.ход второго - с первыми входами второго и четвертого элементов И 16, причем выходы первого и второго элементов И 16 соединены с входами первого элемента ИЛИ 17, выходы третьего и четвертого элементов И 16- с входами второго элемента ИЛИ 17, выходы элементов ИЛИ 17 - с входами соответствующих ждущих мультивибраторов 18, выходы которых посредством электронных усилителей 19 подключены к входам исполнительного механизма 20 управления выдержкой времени. Устройство работает следующим образом. При движении уборочной машины по рабочей длине гона копир-водитель 1 находится между убираемыми рядками. Если уборочная машина отклоняется от рядка, он поворачивается и перемещает управляющие органы электропреобразователей 2- 4. При этом в схеме сравнения сигналов преобразователей 2 и 5 появляется электрический сигнал определенной полярности. После усиления он поступает в один из дискриминаторов 9, а затем через элемент ИЛИ 11 и усилитель 10 в катушки электрогидропреобразователя 7. Начинается подача рабочей жидкости к одной из полостей гидроцилиндра 6. Как только произойдет поворот управляемых колес на угол, при котором разбаланс моста меньше зоны нечувствительности схемы сравнения, сигнал на выходе дискриминатора 9 исчезает, отключается запрет на элементе 12 второй электрической цепочки. Таким образом эта электрическая цепь подготавливается для переключения электрогидропреобразователя 7 на подачу рабочей жидкости к гидроцилиндру 6 для/возврата управляемых колес в среднее положение. Электрическое изменение курсового угла происходит с некоторым запаздыванием по отношению к повороту управляемых колес. Поэтому при правильном выборе интервала выдержки времени на включение сигнала на возврат колес в среднее положение поворот уборочной машины происходит без запаздывания или опережения в сравнении с движением копира-водителя I, чем и обеспечивается точное движение уборочной машины относительно убираемых рядков растений. Если изменяются условия работы или техническое состояние машины, снижается точность движения. При этом переходный процесс может оказаться автоколебательным или очень медленным. В первом случае, если произойдет повторное срабатывание копира-водителя 1 в противоположную сторону еше в течение действия выдержки времени на пропадание входного сигнала на элементе 15, этот сигнал пройдет элемент 16 и преобразуется ждущим мультивибратором 18 в и.мпульс , необходимый для срабатывания исполнительного механизма 20 управления выдержкой времени и органа 14 управления на снижение задаваемого элементом 13 интервала выдержки времени. При замедленном переходном процессе продолжительность импульса от релейного электропреобразователя 4 превышает выдержку вре.мени элемента15 на появление вы.ходного сигнала. В этом случае блок адаптации формирует сигнал +Т на увеличение задаваемого элементом 13 интервала выдержки времени. Таким образом, система постоянно адаптируется к условиям работы и техническому состоянию уборочной машины. При применении такой адаптации обеспечивается оптимальная настройка автоматической системы, повьшшется точность вождения, а точнее следование уборочной машины вдоль рядка убираемых растений позволяет значительно снизить потери. /5 f6 17 18 / r f3
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического вождения уборочной машины вдоль убираемых рядков | 1981 |
|
SU1014490A1 |
| Сельскохозяйственный агрегат | 1982 |
|
SU1085536A1 |
| Устройство для автоматического вождения самоходных машин вдоль заданной траектории | 1979 |
|
SU886773A1 |
| СПОСОБ ГРУППОВОГО ВОЖДЕНИЯ ДОРОЖНЫХ ДРОНОВ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2017 |
|
RU2662297C1 |
| Способ автоматического вождения самоходной уборочной машины по рабочей длине гона | 1980 |
|
SU952121A1 |
| ТРАКТОР ТОЧНОГО ХОДА И СПОСОБ АВТОПИЛОТИРОВАНИЯ МАШИННО-ТРАКТОРНОГО АГРЕГАТА ПО МЕСТНЫМ ОРИЕНТИРАМ | 2013 |
|
RU2550915C1 |
| Копирующее устройство срезающего аппарата капустоуборочной машины | 1979 |
|
SU982574A1 |
| РУЛЕВАЯ СИСТЕМА АГРОМОБИЛЬНОГО АГРЕГАТА | 2015 |
|
RU2582738C2 |
| Система автоматического управления положением рабочих органов сельскохозяйственного агрегата | 1989 |
|
SU1667657A1 |
| Устройство для обучения водителей транспортных средств | 1986 |
|
SU1350658A1 |
АДАПТИВНАЯ АВТОМАТИЧЕСКАЯ СИСТЕМА ВОЖДЕНИЯ САМОХОДНЫХ УБОРОЧНЫХ МАШИН ВДОЛЬ УБИРАЕМЫХ РЯДКОВ, содержащая пропорциональные и релейные электропреобразователи, механически связанный с ними копир-водитель, схему с управляемыми элементами выдержки времени на автоматический возврат управляемых колес в среднее положение, исполнительный механизм управления выдержкой времени, орган управления выдержкой времени, и блок поисковой адаптации, отличающаяся тем, что, с целью повышения точности вождения, блок поисковой адаптации содержит логические элементы выдержки времени на появление и пропадание, входного сигнала, элементы И, ИЛИ, ждущие мультивибраторы и электронные усилители, при этом входы элементов выдержки времени на появление и пропадание входного сигнала соединены С выходами релейного электропреобразователя и соответственно вход первого - с вторыми входами первого и четвертого элементов И, вход второго - с вторыми входами второго и третьего элементов И, а выходы элементов выдержки времени на появление и пропадание входного, сигнала соединены соответственно выход первого - с первыми входами первого и третьего элементов И, выход второго- - с первыми входами второго и четвертого элементов И, причем выходы первого и второго элементов И соединены с входами первого элемента ИЛИ, выходы третьего и четвертого элементов И - с входами второго элемента л ИЛИ, выходы элементов ИЛИ - с входами соответствующих ждущих мультивибраторов, выходы ксгорых посредством электронных усилителей подключены к входам исполнительного механизма управления выдержкой времени.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Авторское свидетельство СССР по заявке № 3009712, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
