Изобретение относится к сельскохозяйственному машиностроению, в частности к устройствам автоматического вождения рабочих органов вдоль обрабатываемых или убираемых рядков, где требуется высокая точность копирования траектории ориентации, например при посеве овощных культур и обработке почвы внутри широкополосных гряд в теплицах и открытом грунте.
Известны устройства для автоматического вождения самоходных и прицепных сельскохозяйственных машин вдоль заданной траектории ориентации, которые осуществляют контроль отклонения от заданной траектории и в случае превышения рассогласования над величиной зоны нечувствительности системы выдают команду на поворот управляемых колес самоходной машины или тракта 1.
Недостатком таких устройств является то, что при автоматическом вождении поворотом непосредственно управляемых колес самоходной машины не может быть достигнута высокая точность копирования траектории ориентации.
Наиболее близкой к изобретению является система автоматизированного вождения колесных машинно-тракторных агрегатов, содержащая измерители траекторной ошибки и положения управляемых колес машины относительно среднего положения, усилители электрических сигналов и исполнительный механизм поворота управляемых колес с двумя управляющими электрическими элементами 2.
Недостатками системы являются ее высокая сложность и недостаточная точность вождения при работе в существенно нестабильных условиях.
Цель изобретения - повышение точности копирования траектории ориентации и упрощение устройства.
Поставленйая цель достигается тем, что в систему автоматического направления технологических рабочих органов сельскохозяйственной машины, содержащую измеритель траекторной ошибки и положения управляемых колес машины, относительно среднего положения, усилители электрических сигналов и исполнительный механизм поворота управляемых колес с двумя управляющими электрическими элементами, введен механизм перемещения управляемых технологических рабочих органов в поперечной плоскости, гидравлический механизм осуществления этого перемещения, измеритель положения технологических рабочих органов относительно среднего положения, который содержит два двухполюсных переключателя с одной замыкающейся и одной размыкающейся цепями каждый, орган переключения которых связан с технологическими рабочими органами, при этом измеритель положения управляемых колес машины относительно среднего положения
имеет два однополюсных переключателя, орган переключения которых связан с управляемыми колесами, и два одновибратора, причем измеритель траекторной ошибки соединен с гидравлическим механизмом перемещения управляемых технологических рабочих органов в поперечной плоскости, каждый однополюсный переключатель соединен через размыкающуюся цепь одного из двухполюсных переключателей, а также через усилитель с одним из управляющих электрических элементов исполнительного механизма поворота управляемых колес, причем к этому же элементу подключена через одновибратор и усилитель замыкающаяся
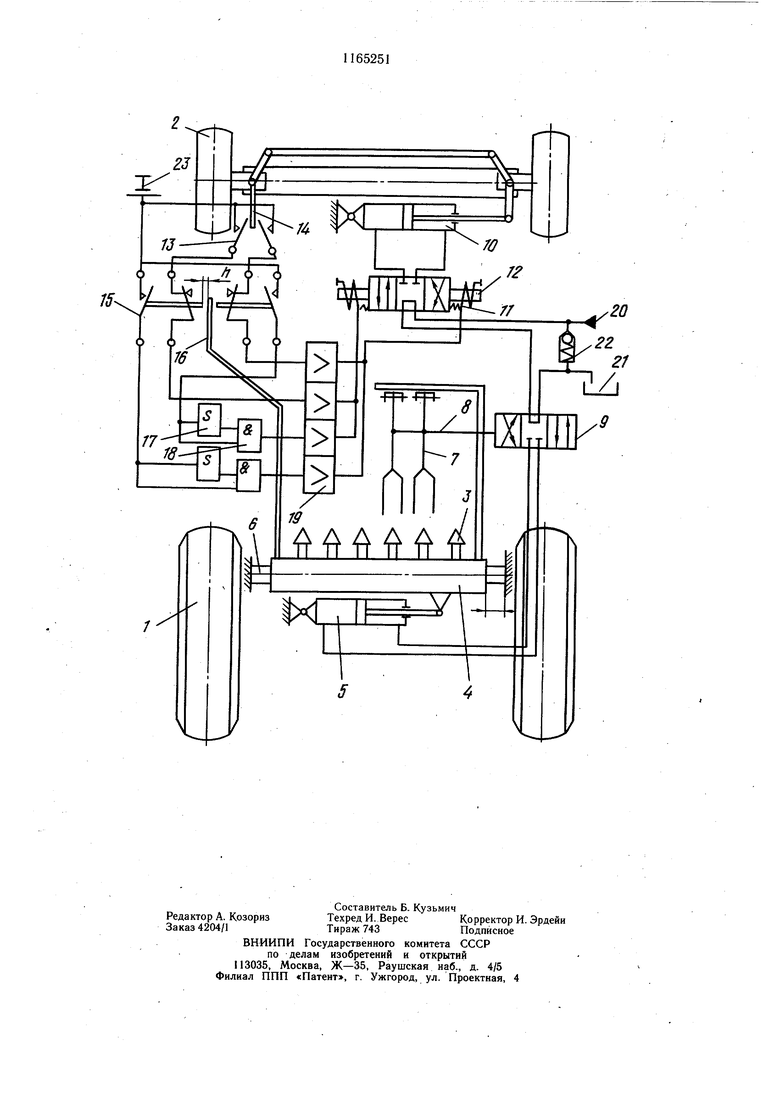
5 цепь второго двухполюсного переключателя. На чертеже приведена схема предлагаемого устройства.
Система автоматического направления технологических рабочих органов сельскохозяйственной машины содержит ведущие 1
0 и управляемые 2 колеса, технологические рабочие органы 3, например, для обработки почвы внутри гряды овощных культур, установленные на подвижной каретке 4, которая под действием гидроцилиндра 5 может перемещаться в поперечном направлении по направляющей 6 в пределах +L относительно продольной оси мащины, измеритель 7 траекторной ошибки, связанный тягой 8 с гидрораспределителем 9, причем опора этого копира установлена на каретке 4. На мосту
0 управляемых колес имеется гидроцилиндр 10. Питание его рабочей жидкостью осуществляется от гидрораспределителя 11 исполнительного механизма поворота управляемых колес с двумя управляющими электрическими элементами 12.
5 На мосту управляемых колес установлен измеритель 13 положения, колес этого моста относительно среднего положения, в который входят два однополюсных переключателя, установленных таким образом относиQ тельно кронштейна 14, что каждый из них включается при противоположных направлениях поворота управляемых колес из среднего положения.
На машине установлен также измеритель
15положения технологических рабочих ор5 ганов относительно среднего положения. В
него входят два двухполюсных переключателя с одной замыкающейся и одной размыкающейся цепями каждый, установленные таким образом относительно кронштейна
16подвижной каретки 4, что каждый из них 0 переключается при противоположных направлениях смещения каретки 4 с рабочими органами 3 из среднего положения на величину больше h.
В электрическую часть системы входят также два одновибратора 17, два логических элемента И 18 и усилители 19 электрических сигналов. Питание гидравлических узлов системы осуществляется от гидропривода, который содержит насос 20, бак 21 и
предохранительный клапан 22. Электрическая часть системы питается от источника 23 питания.
Измеритель 7 траёкторной ошибки соединен с гидрораспределителем 9 гидроцилиндра 5. Каждый однополюсный переключатель измерителя 13 положения управляемых колес соединен через размыкающуюся цепь двухполюсного переключателя -измерителя 15 положения технологических рабочих органов, включающегося при том же направлении отклонения из среднего положения, а также через усилитель 19 с одним из управляющих электрических элементов 12 гидрораспределителя 11 исполнительного механизма поворота управляемых колес. К этому же управляющему элементу подключена через одновибратор 17, элемент 18 и усилитель 19 замыкающаяся цепь двухполюсного переключателя измерителя 15, включающегося при противоположном направлении отклонения рабочих органов 3 из среднего положения.
Система работает следующим образом.
Контроль за направлением движения технологических рабочих органов осуществляют с помощью измерителя 7 траёкторной ощибки. При отклонении от траектории ориентации он воздействует на гидрораспределитель 9 исполнительного механизма поворота управляемых колес. К гидроцилиндру 5 поступает масло и он перемещает каретку 4 с рабочими органами 3 и опорой измерителя траёкторной ощибки в поперечном направлении по направляющей 6. Такое перемещение возможно в каждую сторону на величину L.
При незначительном отклонении мащины дополнительно осуществляется управление ею с помощью управляемых колес. Причем информационным параметром здесь является положение каретки 4 с кронщтейном 16 относительно продольной оси машины. При смещениях каретки 4 на величину больще h(h L) происходит переключение одного из двухполюсных переключателей измерителя 15. При этом импульсный сигнал, продолжительность которого определяется одновибратором 17, после усиления в усилителе 19 поступает к соответствующему управляющему электрическому элементу 12. За время действия электрического импульса через гидрораспределитель 11 к гидроцилиндру 1G прохО;а,ит порция рабочей жидкости от насоса 20 и управляемые колеса 2 поворачиваются на определенный угол, зависящий от настройки одновибратора 17. Самоходная машина начинает поворот в сторону ликвидации отклонения от траектории ориентации, что вместе с продолжающимся поперечным смещением рабочих органов обеспечивает быстрое устранение его.
Если переключатель измерителя 15 окажется включенным на промежуток времени
меньше продолжительности импульса одновибратора 17, прямой вход элемента, И 18 от переключателя измерителя 15 окажется отключенным от источника питания реньше, с чем закончится импульс от одновибратора 17. Поэтому электрический импульс, поступающий к элементу II, равен фактическому времени включения переключателя измерителя 15.
По мере смещения машинь в сторону сни0 женин отклонения от траектории ориентации измеритель 7 Сформирует команду на возврат каретки 4 в среднее положение и, когда отклонение этой каретки станет меньше h, произойдёт обратное переключение ранее , включенного переключателя измерителя 15. После начала поворота управляемых колес 2 осуществляется включение одного из переключателей измерителя 13. Однако при отключенной размыкающейся цепи переключателя измерителя 15, что соответствует отклонению каретки 4 на величину больше h, включение переключателя измерителя 13 не оказывает влияния на работу системы. Но как только каретка 4 приблизится к среднему положению на расстояние меньше h и ранее разомкнутая цепь переключателя из5мерителя 15 замкнется, окажется замкнутой цепь к противоположному управляющему электрическому элементу 12 гидрораспределителя 11 исполнительного механизма поворота управляемых колес. В резульQ тате этого произойдет подача масла к гидроцилиндру 10 и управляемые колеса 2 вернутся в среднее положение.
Таким образом, система автоматического управления производит точное направление технологических рабочих органов в поперечной плоскости и дополнительно управление непосредственно машиной с тем, чтобы она не имела существенных отклонений относительно траектории ориентации, а перемещаемые в поперечном направлении рабочие органы располагались около ее продольной оси. Причем дополнительное управление производится только тогда, когда смещение технологических рабочих органов оказывается больще заданной величины h, в несколько раз превыщающей технологический допуск на погрешность копирования траектории ориентации, в связи с чем существенно уменьшается количество срабатываний управляемых колес.
Применение предлагаемой системы автоматического управления дает экономический эффект в сравнении с известным за счет достижения высокой прямолинейности рядков при посеве овощных культур широкополосным или грядовым способами в теплицах или открытом грунте и возможности обработать их с высокой точностью, что позволяет снизить повреждения растений. Соответственно возрастает урожайность выращиваемой культуры.
{
Ы
X
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления движением трактора | 1980 |
|
SU1014489A1 |
| Система автоматизированного вождения машинно-тракторных агрегатов | 1982 |
|
SU1060130A1 |
| Устройство для оценки качества автовождения сельскохозяйственного агрегата | 1984 |
|
SU1186101A1 |
| Система автоматизированного вождения колесных машинно-тракторных агрегатов | 1981 |
|
SU1033033A1 |
| Копирующее устройство для автоматического вождения сельскохозяйственной машины по борозде | 1981 |
|
SU959649A1 |
| СПОСОБ УПРАВЛЕНИЯ СЕЛЬСКОХОЗЯЙСТВЕННЫМ АГРЕГАТОМ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2023360C1 |
| Устройство для автовождения машинно-тракторных агрегатов | 1986 |
|
SU1405719A1 |
| Способ автоматического вождения колесного трактора и устройство для его осуществления | 1984 |
|
SU1311641A1 |
| Система рулевого управления транспортного средства | 1985 |
|
SU1710420A1 |
| Устройство для вождения колесного машинно-тракторного агрегата на рабочем гоне и поворотной полосе | 1980 |
|
SU934942A1 |
СИСТЕМА АВТОМАТИЧЕСКОГО НАПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИХ РАБОЧИХ ОРГАНОВ СЕЛЬСКОХОЗЯЙСТВЕННОЙ МАШИНЫ, содержащая измерители траекторной ошибки и положения управляемых колес машины относительно среднего пЬложения, усилители электрических сигналов и исполнительный механизм поворота управляемых колес с двумя управляющими электрическими элементами, отличающаяся тем, что, с целью повышения точности копирования траектории ориентации и упрощения устройства, в него введены механизм перемещения управляемых ВСЕСОК Я Г Iff:-. (Ч ПАТ-;:.-: . 13 tr Л---;;-sv; М5лЯ4зп :лтехнологических рабочих органов в поперечной плоскости, гидравлический механизм осуществления этого перемещения, измеритель положения технологических рабочих органов относительного среднего положения, который содержит два двухполюсных переключателя с одной замыкающейся и одной размыкающейся цепями каждый, орган переключения которых связан с технологическими рабочими органами, при этом измеритель положения управляемых колес машины относительно среднего положения имеет два однополюсных переключателя, орган переключения которых связан с управляемыми колесами, и два одновибратора, причем измеритель траекторной ощибки соединен с гидравлическим механизмом перемещения ш управляемых технологических рабочих органов в поперечной плоскости, каждый, одно: полюсный переключатель соединен через размыкающуюся цепь одного из двухполюсных переключателей, а также через усилитель с одним из управляющих электрических элементов исполнительного механизма поворота управляемых колес, причем к этому же элементу подключена через одновибратор и О5 усилитель замыкающаяся цепь второго двухполюсного переключателя. сд го сд
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для автоматического вождения самоходной сельскохозяйственной машины | 1982 |
|
SU1017179A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Система автоматизированного вождения колесных машинно-тракторных агрегатов | 1981 |
|
SU1033033A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
