Изобретение относится к сельскохозяйственному машиностроению, а именно к конструкции самоходных уборочных ма1иин.
Известен способ автоматического воишения самоходной уборочной машины по рабочей длине гона, содержащий автоматическое определение величины рассогласования направления движения уборочной машины от направления рядкоп убираемых растений с помощью чувствительного элемента, выработку сигнала рассогласования в результате срайнег ия сигнала от чувствительного элемента и сигнгша от датчика положения управляемых колес машины, усилие и отработку сигнала рассогласования посредством поворота управляe IЫx колес с помощью исполнительного устройства и рулевого механизма tl.
Недостатком указанного способа япляотся повьшгенный износ рулевого механизма и недостаточная точность движения мшиины по заданному направлению - рыскание машины относительно заданного копируемого направления, которое носит синусоидальный характер.
Цель изобретения - повышение точности направления движения самоходной уборочной машины по рабочей длине гона и уменьшение износа рулевого механизма.
Указанная цель достигается тем, что управляемые колеса маитны возвращают в. среднее, согласованное С направлением движения уборочной машины, положение через оптимальный для данных условий работы промежуток времени после окончания поворота На отработку рассогласования времени, причем установку последнего осуществляют автоматически в зависимости от величин отклонений чувствительного элемента и управляемых колес, технического состояния рулевого механизма управляемой машины и состояния грунта.
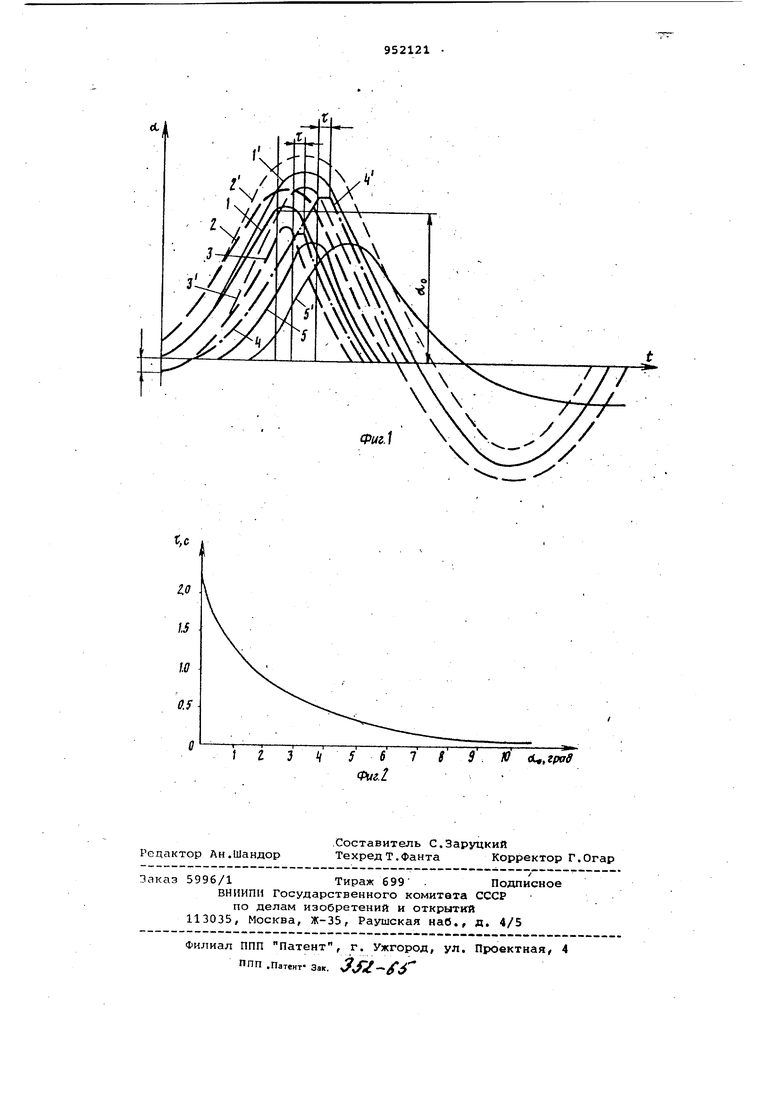
На фиг. 1 изображен график изменения основных параметров поворота машины при работе -по данному способу; на фиг. 2 - экспериментально устакоаленная зависимость запаздывания курсового угла машины, оцененного косвенно по углу « отклонения чувствительного элемента через промежуток времени после появления возмущения.
Кривая 1 показывает изменение угла поворота чувствительного элемента направления движения относительно рамы маиткы, кривые 2 и 3 - границы зоны нечувствительности системы ,управления с учетом люфтов рулевого механизма, приведенного к положению чувствительного.элемента, кривая 4 показывает изменение угла поворота управляемых колес относительно рамы, кри1зая 5 - изг.1 енение фактическо го курсового, угла поворота оси маши ны. Кривые 1-5 - то же, при увеличенном времени запаздывания. Символы, приведенные на графике, обознач ют (L - величину угла, t - время, cLg - угол отклонения чувствительного элем.ента, t - выдержку времени. Автоматическое вождение сагюходной уборочной MauJHHM по рабочей дли - не гона с примененном данного спосо производится следующим образом. После поворота чувствительного элемента, вызванного отклонением уб речной машины от рядка убираемых рас ни.., исполнительное устройство руле вого механизма, поворачивает управ ляемые колеса-на угол, при котором сигнал рассогласования становится меньше зоны нечувствительности систе мы (точка а , фиг.1), а затем после заданной выдержки времени 1Г автомат чески возвращаются в среднее положе ние. Правильно выбранная выдержка вр мени X перед включением сигнала на, возврат управляемых колес в среднее положение при определенной зоне нечувствительности автоматической сист мы позволяет произвести поворот уборочной машины без запаздывания или опережения Б сравнении с поворотом чувствительного элемента (группа кри вых 1-5, фиг.1), В среднее согласованное положение они приходят одновременно, чем и обеспечивается точное движение самоходной уборочной MaiuHHhJ вдоль рядков убираемых растений. Выдержка времени перед подачей сигнала на возврат управляемых колес в среднее положение согласовывается с запазд;-..шанивм изменения курсового угла машины по отношению к положению чувствительного элемента. При измене нии времени запс1здывания (группа кривых 1-5, фигЛ), а также при изме нении технического состояния рулевого механизма, фактический курсовой угол уже не будет соответствовать повороту чувотвительного элемента и выравни зание машины произойдет не однопрсменно по отношени о к положению чувствительного элемента, поэтому выдержка времени t.управляема и согласована с запаздыванием курсового угла,. При автоматическом вождении самоходной уборочной машины с использова нием данного способа предусматривается ,зс1мер отклонения чувствительного элемента через постоянный промежуток времени t. после каждого отклонения его под действием возмущения от среднего положения, суммирование заданного числа этих сигналов и сравнение полученной величины с заданной программой, составленной в соответствии с зависимостью времени выдержки f от угла Отклонения чувствительного элемента (фиг.2), что позволяет определить оптимальное значение вьц7«рхп и времени, через которое должен быть сформирован сигнал на возврат управляемых колес в среднее положение. Применение данного способа автоматического вождения самоходной уборочной машины по рабочей длине гона дает, экономический эффект за счет сокращения потерь при уборке путем повышения точности направления движения, значительного уменьшения износа рулевого механизма и сокращения затрат на его техническое обслуживание. Формула изобретения Способ автоматического вождения самоходной уборочной маимны по рабочей длине гона, содержащий автоматическое определение величины рассогласования направления движения уборочной машины от направления рядков убираемых растений .с помощью чувствительного элемента, выработку сигнала рассогласования в результате сравнения сигнала от чувствительного элемента и сигнала от датчика положения управляемых колер машины, усиление и обработку сигнала рассогласования посредством поворота управляемых, колес с помощью исполнительного устройства и рулевого механизма, отличающийся тем, что, с целью повышения точкости направления движения и уменьшения износа рулевого механизма, управляемые колеса возвращают в среднее, согласованное с направлением движения уборочной машины, положение через оптимальный для данных условий работы промежуток времени после окончания понорота на отработку рассогласования времени, причем установку последнего осуществляют автоматически в зависимости от величин отклонений чувствительного элемента и управляемых колес, технического состояния рулевого механизма управляемой машины и состояния грунта. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР 676200, кл. Л 01 В 69/04, 1976.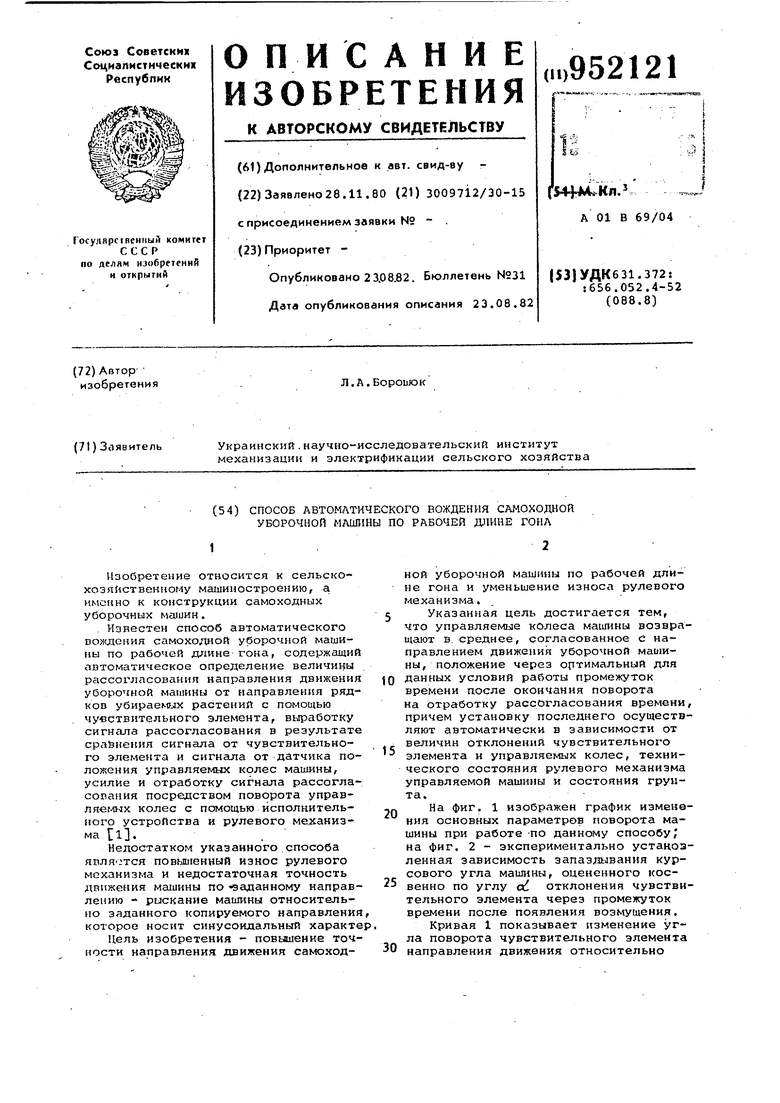
| название | год | авторы | номер документа |
|---|---|---|---|
| Адаптивная автоматическая система вождения самоходных уборочных машин вдоль убираемых рядков | 1981 |
|
SU1007572A1 |
| Устройство для управления движением трактора | 1980 |
|
SU1014489A1 |
| Устройство для автоматического вождения самоходного агрегата | 1988 |
|
SU1605953A1 |
| Устройство для автоматического вождения самоходных машин вдоль заданной траектории | 1979 |
|
SU886773A1 |
| Устройство для автоматического вождения уборочной машины вдоль убираемых рядков | 1981 |
|
SU1014490A1 |
| Система автоматического вождения сельскохозяйственной машины по борозде | 1985 |
|
SU1387888A1 |
| Устройство для вождения колесного машинно-тракторного агрегата на рабочем гоне и поворотной полосе | 1980 |
|
SU934942A1 |
| Самоходная корнеклубнеуборочная машина | 1982 |
|
SU1090276A1 |
| Устройство для автоматического направления движения самоходной сельскохозяйственной машины | 1980 |
|
SU948308A1 |
| Сельскохозяйственный агрегат | 1982 |
|
SU1085536A1 |