терной лентой для подачи рукава .пнавмокамеры механизмы для пробивки отверстия и монтажа вентнля с исполнительными органами, приводы для их продольных перемещений и поворотный механнЗМ для вентиля, оно снабжено смонтированным.н в плоскости транспортерной ленты следящими .механлама-ми, связанными € приводами продольных леремещений исполнительных механизмов, механизм для монтал а вентиля снабжен дополнительным иополиительньш органом, а механизмы для .пробивки отверстия и монтажа вентиля выполнены в виде программных манипуляторов.
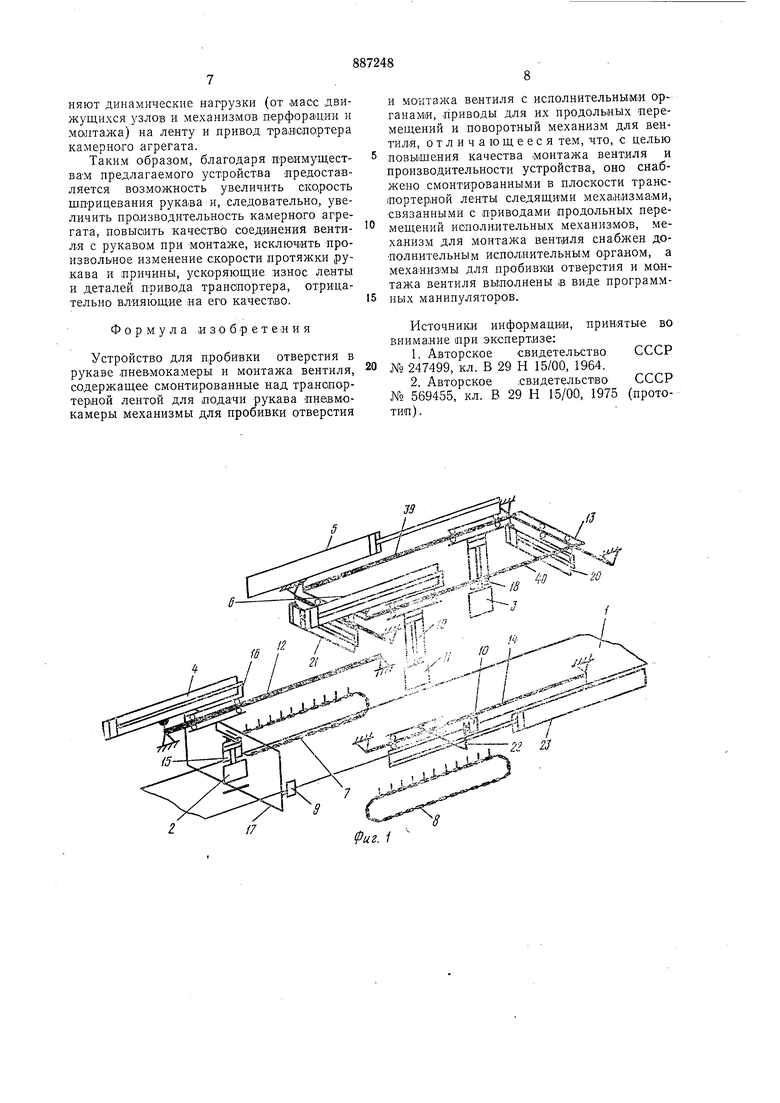
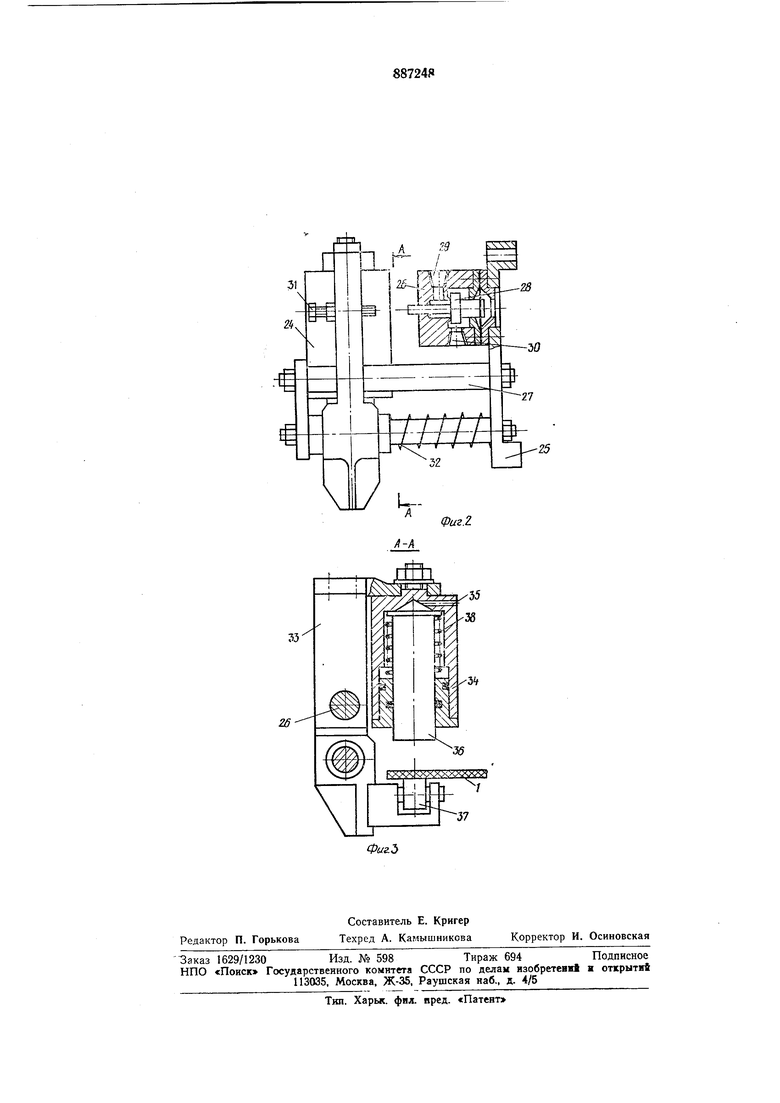
На фиг. 1 изображена технологическая схема предлагаемого устройства; на фиг., 2 - о-бщий Бид следящего механизма; на фиг. 3 разрез А-А на фиг. 2.
Устройство содержит смолти-роваНные над транспортерной лентой 1 для подачи рукава пневмокамеры механизм 2 для пробивки отверстия, механизм 3 для монтажа вентиля с исполнительными органами, приводы 4, 5 (И 6 соответственно для их .продольных перемещений и поворотные механизмы 7 и 8 для вентилей. Устройство снабжено омонтпровапнымй в плоскости трайспортерной ленты 1 следящими механизмами 9 и 10, связанными с приводами 4, 5 и б продольных перемещений исполнительных механизмов. Механизм 3 для монтажа вентиля снабжен дополнительным исполнительным органом 11, а механизмы 2 и 3 для нрОбивки отверстия и монтажа .вентиля выполнены в виде программных манипуляторов 12 и 13. Устройство содержит механизм 14, воспринимающий усилие монтажа.
Программный манипулятор 12 выполнен портального тила и включает в себя механизм 2 для Пробивки отверстия, связанный со щтоком привода 15 для его вертикальиого перемещения, каретку 16, на которой смонтирован (Механизм 2 и привод 15, привод 4 для продольного перемещения каретки 16 и стойку 17 манипулятора ;12. Привод 15 имеет установочное перемещание в направлении, перпендикулярном движению рукава (для настройки на обработку иневмока.мер со смещенным вент1Илем).
Программный манипулятор 13 выполнен также портального типа и включает в себя механизм 3 для монтажа вентиля, дополнительный исполнительный орган 11, приводы 18 и 19 для вертикальных перемещений механизма 3 и исполнительного органа Г1 соответственно, .приводы 5 1И 6 для продольного перемещения механизма 3 и исполнительного органа 11 и приводы 20, 21 для их поперечного перемещения.
Приводы 5, б друг от друга .кинематически независимы т автономны от приводов 20 и 21, работающих синхронно.
Механизм .14 состоит из стойки 32 и платформы, которая имеет возможность перемещаться по напоавляЮШим г.ин ппинп
с транспортной лентой 1 посредством привода 23 продольных перемещений и расположен под ней. На стойке 17 манипулятора 12 и стойке 22 механизма 14 в плоскости
транспортерной ленты 1 установлены следящие механизмы, со.ответст1венно 9 и 10.
Механизм 9 или аналогичный ему по .конструкции механизм ДО состоит из фиксирующего приспособления 24, которое обеспечивает .механическое сцепление с движущейся транспортерной лентой 1, несущего кронщтейна 25 и улравляю.щего приопособления 26, которое сообщает приводу скорости движения, соответствующие скорости
перемещения транспортерной ленты. Фиксирующее приспособление 24 и управляющее приспособление 26 кинематически разомкнуты и имеют возмож.ность .переме.щаться друг относительно друга по скалке
27. Управляющее Приспособление 26 содержит клапан -28 для управления энергоносителем, который поступает через .каналы 29 и 30. Регулирующий болт 31 служит для точной настройки начала воздействия фиксирующего .приспособления 24 на клапан 28. Пружи.на 32 удерживает фиксирующее приспособление в исходном положении.
Последнее смонтировано на .кронштейне 33 и состоит из цилиндра 34 с каналом 35
подвода питания, плунжера 36 с призматическим торцом, ролика 37, между которыми проходит транспортерная лента 1 и возвратной пружины 38.
Манипулятор 13 снабжен каретками 39
:И 40.
Устройство pai6oTaeT следующим образом. В исходном положении каретка 16 (см. фиг. 1) манипулятора 12 находится в крайнем левом положении, (приводом 15 меха.низм 2 поднят вверх, следящий механизм 9 с транспортерной лентой 1 разъединен.
Каретка 39 манипулятора 13 находится в крайнем правОМ положении, .каретка 40 в крайнем левом положении, приводами 18 и
19 :механизм 3 и исполнительный орган 11 подняты вверх.
Манипулятор 13 смещен в крайнее попереч.ное положение .относительно оси транспортерной ленты 1 так, что исполн)Ительный орган 11 с вентилем находится /над pyKaiBOM пневмокамеры, а механизм 3 для монтажа вентиля - в плоскости вентилей, находящихся на поворотном механизме 7. Механизм 14 занимает крайнее левое положение, а следящий механизм IO разомкнут. В мо.мент по.даии сигнала от устройства, отмеривающего длину заготовки .камеры (на фиг. 1 не показано), следящий механизм 9 замыкает ся, фиксируется .на ленте
1 и начинает перемещаться вместе с ней,
Сигнал рассогласования ооложения следящего механизма 9 и каретки 16 .подается на привод 4 и он начинает отслеживать движения следящего механизма и, следовательяо. пукяна (Пневмокамеоы. Одновременно каретка 39 приводом 5 перемсцдается в крайнее левое положение, привод 18 вертикальных .перемещений опускается .вниз, механизм 3 захватывает вентиль, поднимается вверх и, находясь в состоянии готовности, ждет соответствующей команды. Поворотный механизм 7 перемещается на один щаг, ставя в «сходное положение следующий вентиль. С начала движения каретки 16 :при-вод 15 вертикального перемещения опускается вниз и механизм 2 пробивает рукав п«евмокамеры и поднимает вверх. В конце рабочего хода каретки 16 следящий механизм 9 наезжает на следящий механизм 10 и до срабатывания и фиксации механизма 10 оии движутся coBiMecTHo, обеспечивая точную Передачу готового отверстия исполнительному органу 11 молтажа вентиля. После фиксации механизма 10 следящий механизм 9 расфиксируется, и каретка 1.6 нриВО.ДОМ 4 ускоренно возвращается ;в исходное положение, а приводы механизма 14 и каретки 40 начинают отслеживать движение рукава пнезмокамеры. Исполнительный орган 11 при этом .находится точно над центpOiM отверстия. Опускаясь вниз, исполнительный орган 11 монтирует вентиль на рукав. При этом каретка механизма 14, перемещаясь под лентой 1, как бы поддерживает ее и воспринимает усилие монтажа. По окончании монтажа исполнительный орган 11 ноднимается вверх, следящий механизм 10 расфи.ксируется. В этот момент начинает работу манипулятор 12, и производит -процесс перфорации в ранее описанной последовательности. Одновремено -манипулятор 13, перемещаясь в другое крайнее поперечное положение, выводит каретку 39 с механизмом 3 монтажа вентиля в рабочую позицию над рукавом пневмока.меры. Механиз.м 14 к каретка 40 с помощью своих при-водов ускоренно возвра-щаются в крайние левые положения. Привод 19 для вертикально1го перемещения исполнительного органа 11 механи.з:ма 3 для монтажа вент1иля опускается вниз, захватив вентиль, затем поднимается вверх и остается в позиции ожидания. К этому времени каретка 16 манипулятора 12 завер-шает .рабочий ход и уходит в исходное поло.жен;ие. Производится монтаж второго вентиля, привод 18 для -вертикальиого перемещения механизма 3 поднимается, следящий механизм 9 расфиксируется. Далее цикл п-о.вторяется. Следящий механизм (см. фиг. 2 и 3) функционирует следующим образом. Управляющее приспособление 26 является датчиком обратной связи следящего привода, работает .как обратный клапан, упра-влябмый механическим усилием. Оно встроено в .цепь пита.ния полости возврата привода продольных перемещений в исходное положение (крайнее левое). Энергоноситель, -подаваемый через канал 29, поднимает клапан 28 и беспрепятственно поступает в соответствующую по лость цилиндра, перемещая порщень в исходное положение. При поступлении команды на начало отслел ивания движения транспортерной Л6НТЫ 1 энергоноситель через канал 35 -подается в полость .цилиндра 34 фиксирующего приспособления. Это устройство, фиксируясь без проскальзывания на ленте 1 за счет защемления ее ролнком 37 и призматическим торцом плунжера 36, перемещается по скалкам 27. Этой же командой происходит переключение энерго.носителя на обратный (рабочий) ход соответствующего -привода. Часть его, оставшаяся в выхлопной полости цилиндра, отсекается клапаном 28 и, находясь в за.мкнутом объеме под рабочим давлением, -препятствует перемещению поршня. Фиксирующее приспособление 24, перемещаясь по скалкам 27, преодолевает усилие пружины 32 и регулирующим болтом 31 воздействует на клапан 28. Клапан 28 смещается, образуется кольцевой зазор, выхлопная полость цилиндра привода теряет герметичность и давление в ней падает. Порщень привода начинает движение, перемещая соответствующий механизм с закрепленным на нем управляющим приспособлением 26. При разности скоростей порщня и ленты 1 площадь .кольцевого зазора меняется, управляя скоростью движения порщня, поддерживая ее на -протяжении рабочего хода соответствующей скор-ости ленты. В конце рабочего хода по команде конечного выключателя (на фиг. 1, 2 и 3 не показан) канал 35 фиксирующего приспособления -сообщается ,с атмосферой, плунжер 36 пружиной 38 -поднимается -вверх. Уст-ройство расфиксируется с лентой 1 и -пружиной 32 возвращается в исходное положение. Следящая система .находится в описываемом положении до начала следующего цикла. Использование двух манипуляторов позволяет технологические операции перфо.рац-ии и монтажа -вентиля выполнять параллельно, совмещая по в-ремени. Использование двух исполнительных органов на втоом маннпзляторе да-ет возможность время а исполнение холостых ходов перекрывать в.ременем рабочего хода. Устройство, распооженное под лентой транспортера, позвояет воспринимать усилия монтажа вениля. Приводы продольного перемещения, упавляемые следящими механизмами, устраняют динамические нагрузки (от масс движущихся узлов и механизмов перфорации и мо,гтажа) на ленту и привод транспортера камерного агрегата.
Таким образом, благодаря преимуществам предлагаемого устройства предоставляется возможность увеличить скорость шприцевания рукава и, следовательно, увеличить производительность камерного агрегата, повысить качество соединения вентиля с рукавом при монтаже, исключить произвольное изменение скорости протяжки рукава и причины, ускоряющие :износ ленты и деталей привода транспортера, отрицательно вл-ияющие на его качество.
Формула изобретения
Устройство для пробивки отверстия в рукаве пневмокамеры и монтажа вентиля, содержащее смонтированные над тралопортерной лентой для подачи рукава пневмокамеры механизмы для пробивки отверстия
и монтажа вентиля с исполнительными органами, приводы для их продольных перемещений и поворотный механизм для вентиля, отличающееся тем, что, с целью повышения качества монтажа вентиля и производительности устройства, оно снабжено смонтированными в плоскости транспортерной ленты следящими механизмами, связанными с приводами продольных перемещений исполнительных механизмов, механизм для монтажа вентиля снабжен дополнительным исполнительным органом, а механизмы для пробивкн отверстия и монтажа вентиля выполнены IB виде программных манипуляторов.
Источники информации, прин.ятые во внимание при экспертизе:
1.Авторское свидетельство СССР № 247499, кл. В 29 Н 15/00, 1964.
2.Авторское свидетельство СССР № 569455, кл. В 29 Н 16/00, 1975 (прототип ).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для установки вентиля на рукаве пневматической камеры | 1980 |
|
SU887249A1 |
| Устройство для установки вентиля на рукаве пневматической камеры | 1985 |
|
SU1346445A1 |
| Устройство для монтажа вентиля на рукаве пневмокамеры | 1981 |
|
SU1031749A1 |
| Станок для монтажа вентиля на камерную заготовку | 1979 |
|
SU856845A1 |
| Установка для монтажа вентиля на автокамере | 1982 |
|
SU1100125A1 |
| Устройство для монтажа вентиля на заготовки пневмокамеры | 1982 |
|
SU1085849A1 |
| Станок для пробивки отверстия в рукаве пневмокамеры и монтажа вентиля | 1975 |
|
SU569455A1 |
| Следящий электропривод с барабанно-роликовым исполнительным элементом | 2023 |
|
RU2814591C1 |
| Следящий электропривод с барабанно-роликовым исполнительным элементом | 2023 |
|
RU2815271C1 |
| МЕХАНИЧЕСКАЯ РУКА | 1993 |
|
RU2065354C1 |
С ::.:
,,п /7
31
24
ML/ u
