I
Изобретение относится -к области числового программного управления металлорежущими станками, а именно к системам контурного управления.
Известна система контурного программного удравления, содержащая последовательно соединенные блок ввода программы, интерполятор и коммутатор, подключенный к блокам ввода программы, технологических команд, выбора инструмента, задания коррекции и исполнительных реле I.
Наиболее близким техническим рещением к данному изобретению является устройство для контурного программного управления, содержащее блок вычисления эквидистанты, подключенный к блоку ввода программы, пульту управления и через блок буферной памяти ко входу кругового интерполятора, подключенного выходом ко входам координатных приводов 2.
Недостатком указанного устройства является необходи лость в большом числе кадров управляющей программы. Кроме того, в связи с тем, что в большинстве обрабатываемых контуров радиус кривизны изменяется плавно, при дугах окружностей радиус . в пределах кадра программы остается постояннььм, а на стыках кадров изменяется скачкообразно, при обработке возникают удары второго рода.
Целькэ изобретения является расширение области применения устройства путем Зменьшения длины управляющей программы. Эта цель достигается при перемещении
центра инструмента по дугам эвольвент окружностей. Так как дуга эвольвенты представляет собой кривую с плавно изменяющимся радиусом кривизны, то это приводит к уменьшению разницы кривизны
на стыках кадров, а следовательно, к уменьшению интенсивности ударов второго рода. Как известно, координаты любой точки эвольвенты есть алгебраическая сумма проекций на соответствующие оси точек основной окружности и радиуса кривизны
р ,
где RO - радиус основной окружности, (О - угол развернутости.
Уравнение для радиуса кривизны представляет собой уравнение спирали Архимеда. Отсюда следует, что если в управляющем зстройстве наряду с линейно-круговым интерполятором будет введен интерполятор спирали Архимеда, то в рез льтате их совместной работы центр инструмента будет двигаться по дугам эвольвент окружностей, образующих траекторию движения инструмента.
Поставленная цель достигается тем, что в устройство для контурного программного управления станком, содержащее координатные приводы и олок ввода программы, выходы которого подключены соответственно ко входу кругового интерполятора и к первому входу блока вычисления эквидистанты, подсоединенного вторым входом к выходу пульта управления, введены координатные Олоки суммирования и интерполятор спирали Архимеда, первые входы которого подключены к выходам блока вычисления эквидистанты, вторые входы - к первым выходам кругового интерполятора, а выходы - к первым входам соответствующих координатных блоков суммирования, соединенных вторыми входами с соответствующими вторыми выходами кругового интерполятора, а выходами - со входами соответствующих координатных приводов. Интерполятор спирали Архимеда содержит последовательно соединенные первый элемент И, первый элемент ИЛИ, первый элемент hJti, первый сумматор, блок определения знака, второй сумматор, третий сумматор, второй элемент И, второй элемент Ht и четвертый сумматор, подключенный к блоку круговой интерполяции, соединенному через блок синхронизации со вторыми входами интерполятора и с соответствующими входами первого элемента И и третьего элемента И, выход которого подключен ко второму входу первого элемента ИЛИ, выход блока определения знака соединен со вторым входом второго элемента И и через четвертый элемент И - со вторым входом первого сумматора, подключенного третьим входом и выходом соответственно к выходу и входу первого регистра, первый вход второго элемента ИЛИ подсоединен ко второму входу четвертого элемента И и к выходу второго регистра, а выход - ко входу регистра. Первый вход третьего элемента ИЛИ соединен с выходом второго сумматора, а выход - через третий регистр со вторыми входами второго и третьего сумматоров, причем вторые входы второго и третьего элементов ИЛИ являются первыми входами -интерполятора, а выходы блока круговой интерполяции - выходами интерполятора.
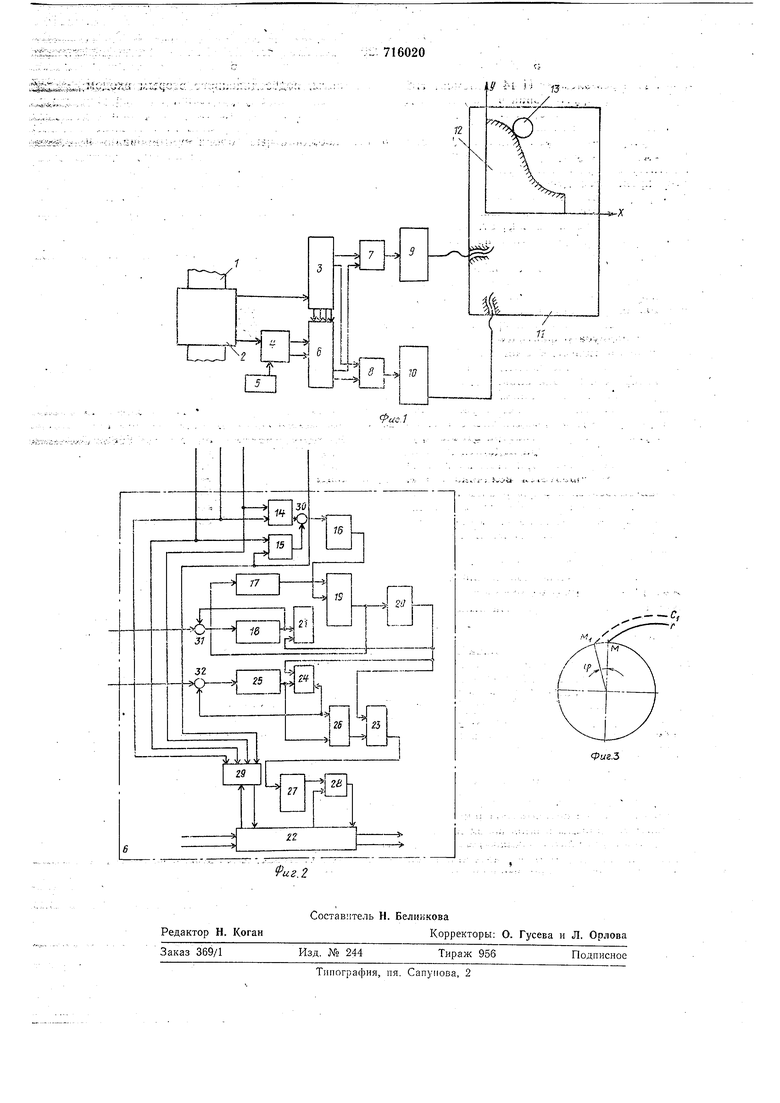
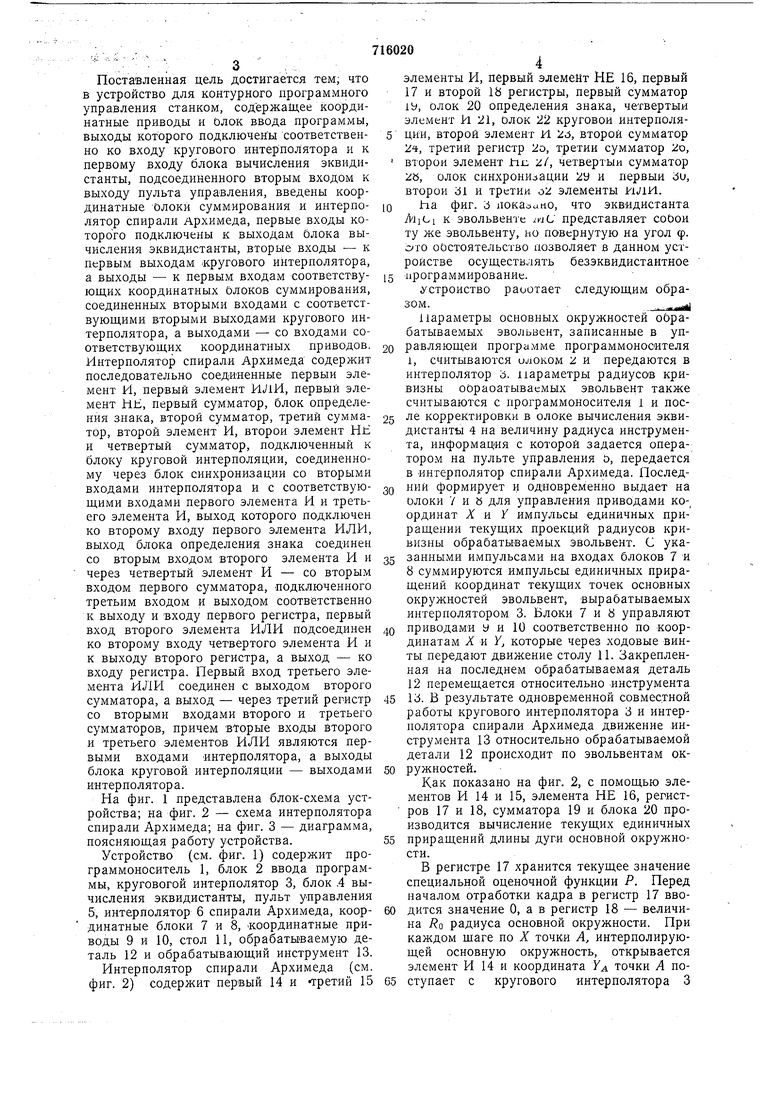
На фиг. 1 представлена блок-схема устройства; на фиг. 2 - схема интерполятора спирали Архимеда; на фиг. 3 - диаграмма, поясняющая работу устройства.
Устройство (см. фиг. 1) содержит программоноситель 1, блок 2 ввода программы, круговогой интерполятор 3, блок .4 вычисления эквидистанты, пульт управления 5, интерполятор 6 спирали Архимеда, координатные блоки 7 и 8, Координатные приводы 9 и 10, стол 11, обрабатываемую деталь 12 и обрабатывающий инструмент 13.
Интерполятор спирали Архимеда (см. фиг. 2) содержит первый 14 и третий 15
элементы И, первый элемент НЕ 16, первый
17 и второй 1Ь регистры, первый сумматор
ib, олок 20 определения знака, четвертый
элемент И 21, олок 22 круговой интерполяЦИИ, второй элемент И 26, второй сумматор
2, третий регистр 2о, третий сумматор iio,
второй элемент jhii 2l, четвертый сумматор
2, олок синхронилации 2У и первый йи,
второй 51 и третий о2 элементы или.
Ьа фиг. 6 показано, что эквйдистанта /WjCi к эвольвенте KJC представляет собой ту же эвольвенту, но повернутую на угол ф. сто оОстоятельство позволяет в данном устройстве осуществлять безэквидистантное
программирование.
устройство раиотает следующим образом.. Параметры основных окружностей обрабатываемых эвольвент, записанные в управляющеи программе программоносителя 1, считываются илоком 2 и передаются в интерполятор 6. параметры радиусов кривизны оораоатываемых эвольвент также считываются с программоносителя 1 и после корректировки в олоке вычисления эквидистанты 4 на величину радиуса инструмента, информация с которой задается оператором на пульте управления t, передается в интерполятор спирали Архимеда. ПоследНИИ формирует и одновременно выдает на ОЛОКИ У и и для управления приводами ко-, ординат X л У импульсы единичных приращении текущих проекций радиусов кривизны обрабатываемых эвольвент. С указанными импульсами на входах блоков 7 и 8 суммируются импульсы единичных приращений координат текущих точек основных окружностей эвольвент, вырабатываемых интерполятором 3. Блоки 7 и 8 управляют
приводами у и 10 соответственно по координатам X и У, которые через ходовые винты передают движение столу 11. Закрепленная на последнем обрабатываемая деталь 12 перемещается относительно инструмента
1. В результате одновременной совместной работы кругового интерполятора 3 и интерполятора спирали Архимеда движение инструмента 13 относительно обрабатываемой детали 12 происходит по эвольвентам окружностей.
Как показано на фиг. 2, с помощью элементов И 14 и 15, элемента НЕ 16, регистров 17 и 18, сумматора 19 и блока 20 производится вычисление текущих единичных
приращений длины дуги основной окружности.
В регистре 17 хранится текущее значение специальной оценочной функции Р. Перед началом отработки кадра в регистр 17 вводится значение О, а в регистр 18 - величина RQ радиуса основной окружности. При каждом шаге по X точки А, интерполирующей основную окружность, открывается элемент И 14 и координата Уд точки Л поступает с кругового интерполятора 3
(фиг. 1) через элемент И 14 и элемент НЕ 16 (где инвертируется знак чнсла) «а вход сумматора 1У, а на второй его вход с регистра 17 подается вел«чина Р.
В результате производится действие Р - У А - Р, а результат снова заносится в регистр 17. Аналогично при шаге точки Л по ф проводится действие Р-ХА- -Р. Если в результате этих действий функция Р станет отрицательной, то появляется импульс на выходе блока 20, открывающий элемент И 21. В результате производится действие Р + RQ - Р, означающее увеличение на 1 длины дуги основной окружности, и функция Р BHdBb становится неотрицательной. В блоке 22 производится интерполяция окружности переменного радиуса р. Этот блок благодаря непрерывному изменению радиуса р фактически -интерполирует спираль Архимеда. Учет изменений радиуса р осуществляется следующим образом. Импульс с выхода блока 20, означающий увеличение на 1 длины основной окружности (а следовательно, и увеличение на 1 радиуса р), открывает элемент И 23 и поступает на вход сумматора 24. На другой вход этого сумматора подается величина р из регистра 25. При этом на выходе сумматора 24 образуется величина р + I, которая заносится в регистр 25 в качестве нового значения радиуса кривизны. Сумматор 26 через элемент И 23 при этом выдает величину 2р + 1, которая в элементе НЕ 27 меняет знак и подается на сумматор 2Ь. На второй вход сумматора 28 и блока 22 подается величина оценочной функции F : А + с - Р ( точка с - текущая точка спирали Архимеда). На выходе сумматора 28 образуется величина Fy, - 2р-1, которая подается обратно в блок 22 в качестве нового значения оценочной функции FC- Работа интерполятора 3 и блока 22 синхронизирована блоком синхронизации 29.
Применение данного устройства позволяет решить сложные задачи контурного управления при уменьшении длины управляющей программы в 1,8-2,5 раза и уменьшении ударов второго рода.
Формула изобретения
1. Устройство для контурного программного управления станком, содержашее координатные приводы и блок ввода программы, выходы которого подключены соответственно ко входу Кругового интерполятора и к первому входу блока вычисления эквидистанты, подсоединенного вторым входом к ВЫХОДУ пульта управления, отличающееся тем, что, с целью расширения области применения устройства, в него введены координатные блоки суммирования и интерполятор опирали Архимеда, первые входы которого подключены к выходам блока вычисления эквидистанты, вторые входы - к первым выходам кругового интерполятора, а выходы - к первым входам соответствующих координатных блоков суммирования, соединенных вторыми входами с соответствующими вторыми выходами кругового интерполятора, а выходами - со
входами соответствующих координатных приводов.
2. Устройство по п. 1, о т л и ч а ю щее с я тем, что интерполятор спирали Архимеда содержит последовательно соединенные первый элемент И, первый элемент ИЛИ, первый элемент НЕ, первый сумматор, блок определения знака, второй сумматор, третий сумматор, второй элемент И, второй элемент НЕ и четвертый сумматор,
подключенный к блоку круговой интерполяции, соединенному через блок синхронизации со вторыми входами интерполятора и с соответствующими входами первого элемента И и третьего элемента И, выход
которого подключен ко второму входу первого элемента ИЛИ, выход блока определения знака соединен со вторым входом второго элемента И и через четвертый элемент И - со вторым входом первого сумматора, подключенного третьим входом и выходом соответственно к выходу и входу первого регистра, первый вход второго элемента ИЛИ подсоединен ко второму входу четвертого элемента И и к выходу второго
регистра, а выход - ко входу второго регистра, первый вход третьего элемента ИЛИ соединен с выходом второго сумматора, а выход - через третий регистр со вторыми входами второго и третьего сумматоров, причем вторые входы второго и третьего элементов ИЛИ являются йервыми входами интерполятора, а выходы блока круговой интерполяции - выходами интерполятора.
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 455323, кл. G 05В 19/18, 1971.
2. Сергиевский Л. В. Электронные устройства системы ЧПУ. М., «Машиностроение, 1977, с. 16 (прототип).
.гЛ;-., -.--- - . t.i .(«i(fe--; --l . 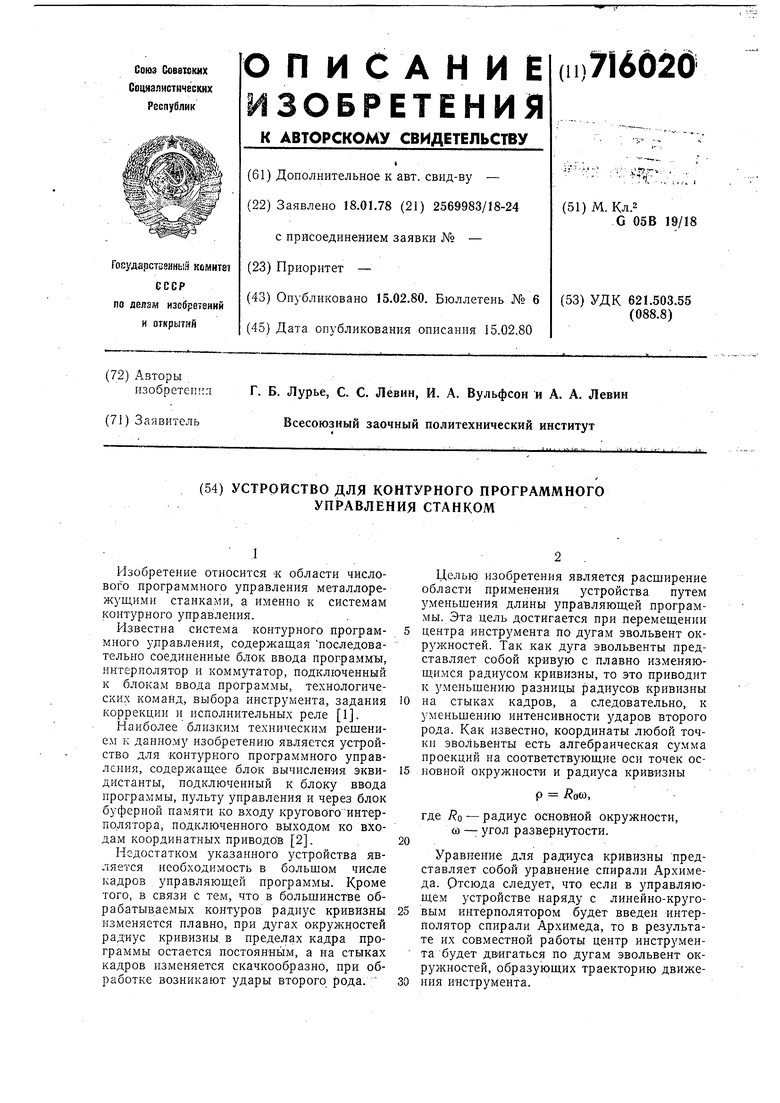

| название | год | авторы | номер документа |
|---|---|---|---|
| Линейно-круговой интерполятор | 1977 |
|
SU734615A1 |
| Линейно-круговой интерполятор | 1978 |
|
SU860004A2 |
| Устройство для коррекции положения резца на станке с программным управлением | 1981 |
|
SU983651A1 |
| Цифровой интерполятор | 1984 |
|
SU1238033A1 |
| Линейно-круговой интерполятор | 1985 |
|
SU1259218A1 |
| Линейно-круговой интерполятор | 1978 |
|
SU896596A2 |
| Цифровой интерполятор | 1981 |
|
SU1003022A1 |
| Устройство для коррекции эквидистанты | 1975 |
|
SU538344A1 |
| Многокоординатный линейно-круговой интерполятор | 1984 |
|
SU1156008A1 |
| Многокоординатный линейно-круговой интерполятор | 1988 |
|
SU1603345A1 |