(5) КОНТАКТНОЕ УСТРОЙСТВО
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля печатных плат | 1991 |
|
SU1837410A1 |
| Координатный стол | 1983 |
|
SU1115109A1 |
| Координатный стол | 1980 |
|
SU944176A1 |
| Координатный стол | 1980 |
|
SU917378A1 |
| МНОГОКООРДИНАТНАЯ МЕТРОЛОГИЧЕСКАЯ ПЛАТФОРМА | 2007 |
|
RU2365953C1 |
| Устройство для установки на печатные платы радиоэлементов, преимущественно микросхем | 1989 |
|
SU1785086A1 |
| СТАНОК ДЛЯ ОБРАБОТКИ ОБЪЕМНЫХ МЕТАЛЛИЧЕСКИХ ПРЕДМЕТОВ | 2015 |
|
RU2703665C2 |
| Вакуумный координатный столик | 1990 |
|
SU1798949A1 |
| Устройство для пайки | 1981 |
|
SU984753A1 |
| Координатная измерительная машина | 1985 |
|
SU1397696A1 |
I
Изобретение относится к радиотехнике и может быть использовано в устройствах контроля печатных плат.
Известно контактное устройство, содержащее основание для крепления печатной платы, контактный блок с упругими контактами и коммутатор устройство обеспечивает возможность автоматического контроля сопротивления между проводниками печатной платы путем плотного контакта с ее выводами, но только плат одного типа, для каждого типа плат необходимо свое контактное устройство, а использование контактного блока с большим количеством контактов не обеспечивает надежного контактирования.
Известно также контактное устройство, сЬдержащее координатный стол с взаимно перпендикулярными направляющими, ползуны с каретками, на которых закреплены зонды с механизмами их перемещения, механизмом блокировки и приводным механизмом С 2.
В данном устройстве перемещение кареток осуществляется при плотном контакте с поверхностью платы, что не позволяет увеличивать скарость каретки из-за возможности повреждения поверхности платы, т.е. нельзя осущест-. вить оперативный контроль плат, имеющих значительные выступы на поверхности. Кроме того, для автономного перемещения кареток, необходимо два приводных механизма,, что усложняет Инструкцию устройства.
Цель изобретения - повышение производительности и упрощение конструкции.
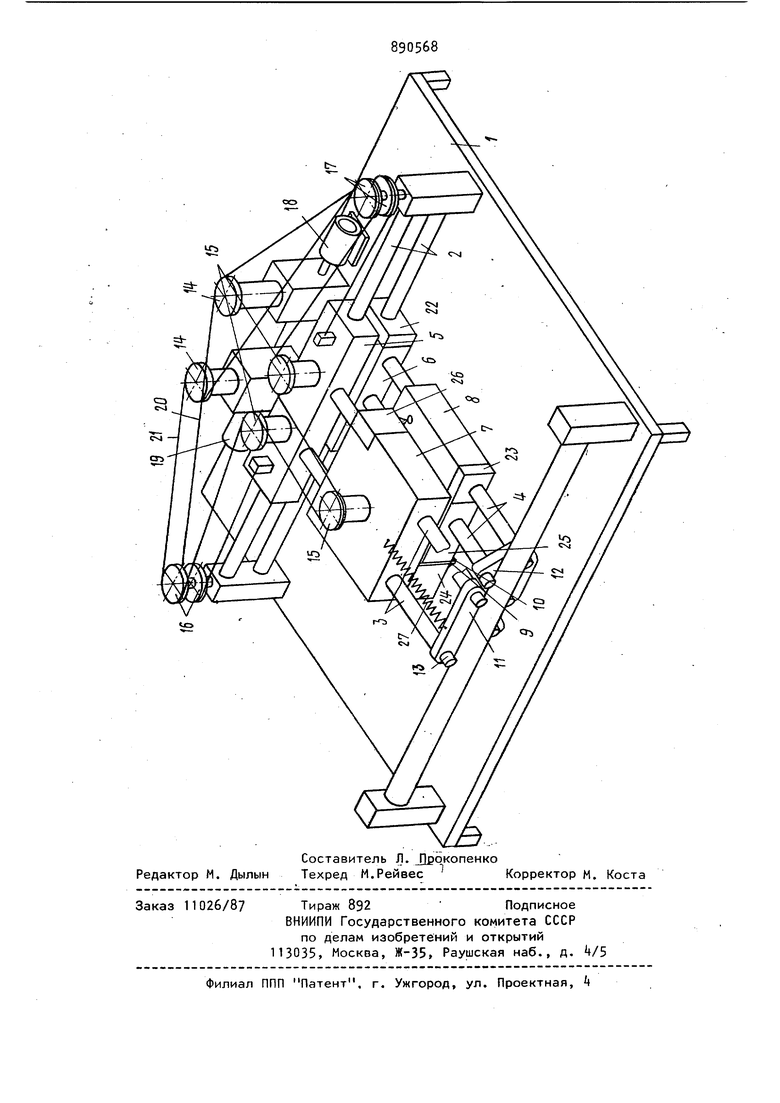
Цель достигается тем, что контактное устройство, содержащее координатный стол с взаимно перпендикулярными направляющими, ползуны с каретками, зонды с механизмом перемещения зондов, механизм блокировки и приводной механизм, оно снабжено механизмом торможения, а каретки с соответствующими ползунами размещены одна над другой, при этом на верхней каретке, кинематически соединенной с приводным механизмом, расположен меха низм блокировки, а на нижней каретке размещен механизм перемещения зондов и механизм торможения. На чертеже изображено предлагаемое устройство. Контактное устройство содержит координатный стол 1, на котором закреплены взаимно перпендикулярные направляющие 2, 3 и . На верхней из горизонтальных направляющих 2 размещен ползун 5 на нижней - ползун 6, служащие для перемещения соответственно кареток 7 и 8 по оси X. Каретки 7 и 8 размещены одна над другой и выполнены с возможностью зависимого автономног взаимного перемеще.ния. Верхняя (активная) каретка 7 размещена на напра ляющей 3, а нижняя (пассивная) карет ка 8 - на направляющей, k. Направляющие 2-k обеспечивают движение карето 7 и 8 в горизонтальной плоскости в произвольном направлении. На каретке 7 установлен активный зонд 9, на каретке 8 -пассивный зонд 10, которые размещены в непересекающихся областях. .Кронштейны 11 и 12 с подшипниками 13 служат для крепления направляющих по оси У и сопряжения их с одной из направляющих вдоль оси X. Неподвижные ролики 1 и подвижные ро лики 15 закреплены на стойках и вмес те с роликами 16 и 17 служат для передачи движения от шаговых двигателей 18 и 19 с помощью тросиков 20 и 21 кареткам с зондами. Механизм торможения выполнен в виде электромагнитов 22 и 23, установленных внут ри ползуна 6 и каретки 8, обеспечивающих торможение пассивной каретки по осям X и У соответственно. Механизм перемещения зондов выполнен в виде электромагнитов 2 и 25, обеспе чивающих подъем активного 9 и пассив ного 10 зондов соответственно. Механизм блокировки 26 кареток 7 и 8 раз мещен в верхней каретке 7 и исключает необходимость в отдельном приводе для каретки 8. Пружина выбора , 4 люфта 27 соединяет каретку 7 и кронштейн 11. Устройство работает следующим образом. На координатный стол 1 устанавливают контролируемую печатную плату. Каретки 7 и 8 перемещают в горизонтальной плоскости так, что пассивный зонд 10 устанавливают на одном из контактных выводов печатной платы, а активный зонд 9 передвигают по специальной программе до следующего контактного вывода этой цепи. Затем производят измерение проводимости выбранного участка цепи; Таким образом, вне зависимости от рисунка печатной платы, устройство позволяет автоматически контролировать ее с помощью единого контактного механизма, содержащего активную и пассивную каретки, которые вначале перемещаются совместно, а,после разблокировки автономно перемещается только активная каретка. Формула изобретения Контактное устройство, содержащее координатный стол с взаимно перпендикулярными направляющими, ползуны с каретками, зонды с механизмом перемещения зондов, механизм блокировки и приводной механизм,, отличающееся тем, что, с целью повышения производительности и упрощения конструкции, оно снабжено механизмом торможения, а каретки с соответствующими ползунами размещены одна над другой, при этом на верхней каретке, кинематически соединенной с приводным механизмом, расположен механизм блокировки, а на нижней каретке размещен механизм перемещения зондов и механизм торможения. Источники информации, принятые во внимание при экспертизе 1. Патент Японии № 52-27828, кл. Н 05 К 13/08, 1977. - 2. Патент Японии № , кл. 59 D kO, Н 05 К 13/00, 1975 (прототип) .
