(54) РАСТОЧНАЯ ДИНАМОМЕТРИЧЕСКАЯ ОПРАВКА
| название | год | авторы | номер документа |
|---|---|---|---|
| Динамометрическая расточная борштанга | 1980 |
|
SU921700A2 |
| Динамометрическая расточная скалка | 1976 |
|
SU657919A1 |
| Динамометрическая оправка длязЕНКЕРОВАНия | 1979 |
|
SU818768A1 |
| Расточная головка | 1990 |
|
SU1787695A1 |
| Динамометрическая борштанга для глубокого сверления отверстий | 1981 |
|
SU986639A2 |
| Расточная головка | 1989 |
|
SU1729702A1 |
| Динамометрический резцедержатель | 1977 |
|
SU742041A1 |
| Вращающаяся резцовая оправка | 1976 |
|
SU574279A2 |
| Динамометрическая оправка | 1990 |
|
SU1830303A1 |
| Расточная оправка | 1986 |
|
SU1414514A1 |
1
Изобретение относится к машиностроению и может быть использовано при растачивании отверстий на токарных станках, оснащенных системами адаптивного управления (САУ) упругими перемещениями системы СПИД.
Известна расточная оправка, содержащая полый корпус, в котором расположен стержень, на последнем установлены катущка колебательного контура и двуплечий рычаг, одним концом контактирующий с корпусом оправки, а другой конец расположен под катущкой . Оправка позволяет измерять собственные упругие деформации, обусловленные действием радиальной составляющей силы- резания.
Недостатками известного устройства являются его сложность и невозможность измерения деформаций, вызванных двумя составляющими силы резания (радиальной и тангенциальной), так как требуется два датчика.
Цель изобретения - повыщение точности получения информации о ходе растачивания и упрощение конструкции оправки.
Поставленная цель достигается тем, что по оси корпуса оправки выполнено отверстие малого диаметра, в котором размещен с зазором металлический тросик, концы которого неподвижно заделаны: левый - в регулировочном винте, правый - в подпружиненной втулке, расположенной в проточке на конце корпуса и несущей якорь датчика, а его катушка индуктивности закреплена на винте, имеющем регулировочное перемещение в той же проточке, при этом рабочие торцы якоря и катущки расположены в плосtoкости, перпендикулярной оси корпуса.
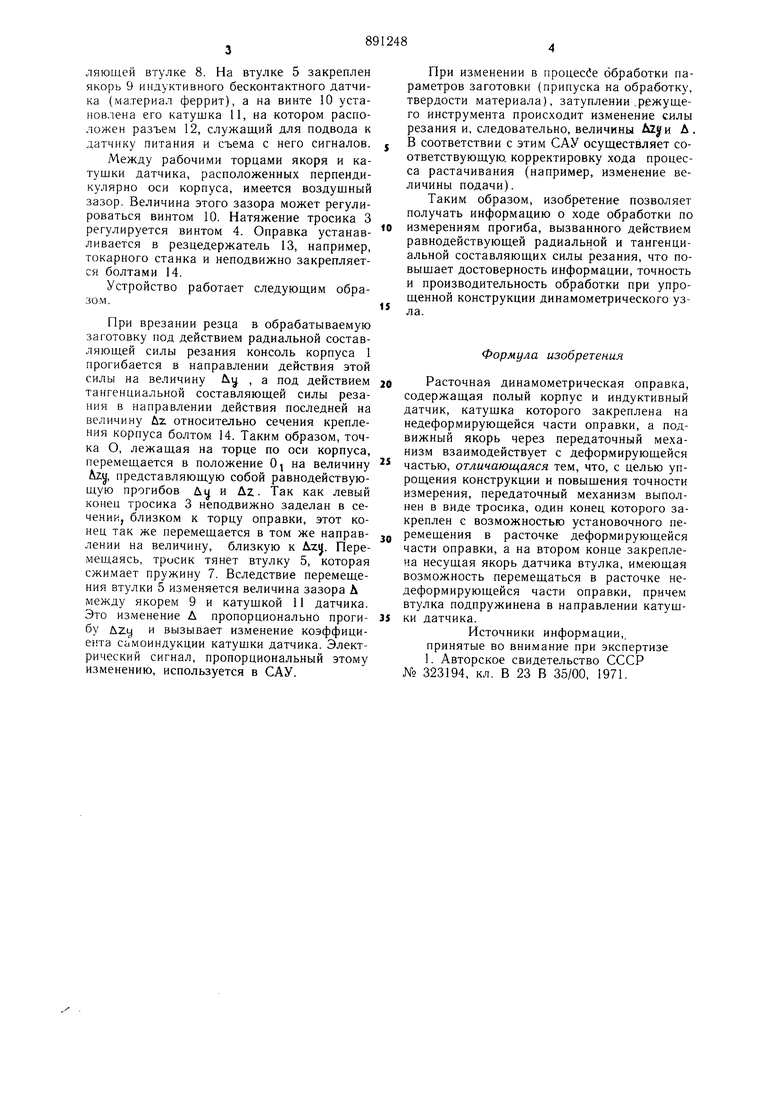
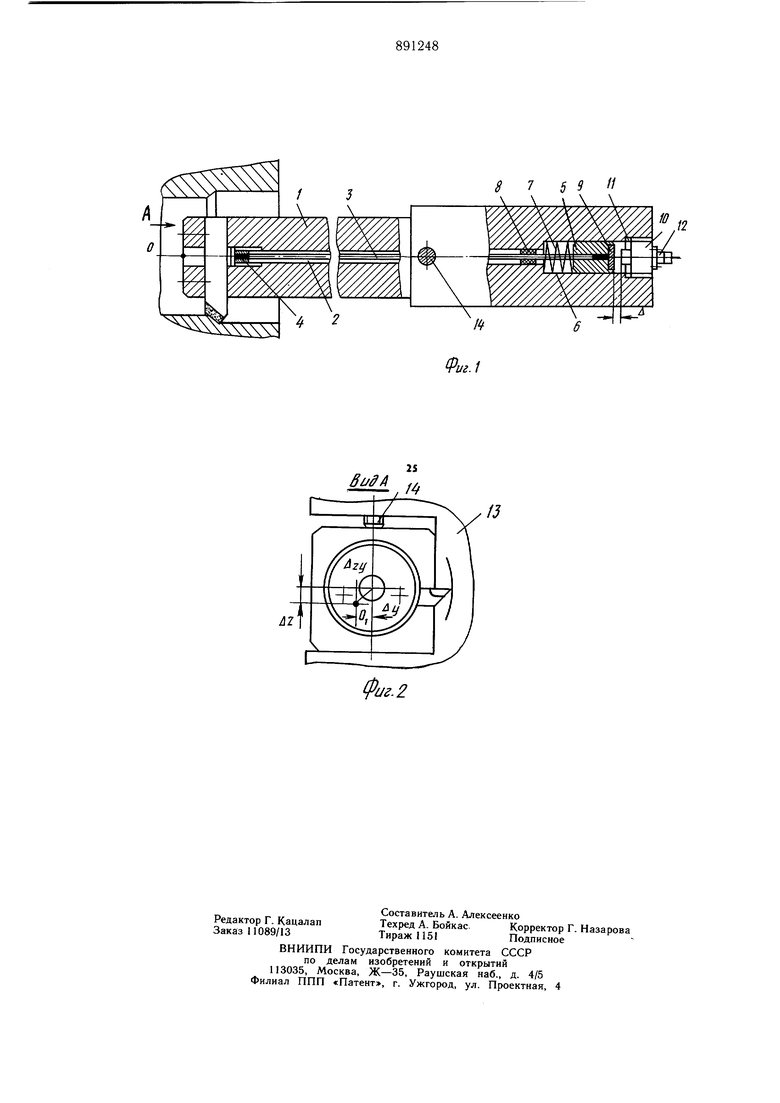
На фиг. 1 показана предлагаемая оправка, общий вид; на фиг. 2 - (вид А на фиг. I).
Устройство состоит из корпуса 1, по оси которого выполнено сквозное отверстие 2 15 малого диаметра. В этом отверстии расположен с зазором металлический тросик 3. Левый его конец неподвижно заделан в регулировочном винте 4, а правый - во втулке 5, которая расположена в проточке 6 корпуса. Втулка 5 подпружинена жесткой пру20жиной 7 и, таким образом, тросик находится в натянутом состоянии. При этом тросик базируется также в текстолитовой направляющей втулке 8. На втулке 5 закреплен якорь 9 индуктивного бесконтактного датчика (материал феррит), а на винте 10 установлена его катушка 11, на котором расположен разъем 12, служащий для подвода к датчику питания и съема с него сигналов.
Между рабочими торцами якоря и катушки датчика, расположенных перпендикулярно оси корпуса, имеется воздушный зазор. Величина этого зазора может регулироваться винтом 10. Натяжение тросика 3 регулируется винтом 4. Оправка устанавливается в резцедержатель 13, например, токарного станка и неподвижно закрепляется болтами 14.
Устройство работает следующим образом,
При врезании резца в обрабатываемую заготовку под действием радиальной составляющей силы резания консоль корпуса 1 прогибается в направлении действия этой силы на величину Лу , а под действием тангенциальной составляющей силы резания в направлении действия последней на величину UZ относительно сечения крепления корпуса болтом 14. Таким образом, точка О, лежащая на торце по оси корпуса, перемещается в положение Oj на величину Az, представляющую собой равнодействующую прогибов Ди и AZ . Так как левый конец тросика 3 неподвижно заделан в сечении, близком к торцу оправки, этот конец так же перемещается в том же направлении на величину, близкую к Azij. Перемещаясь, трисик тянет втулку 5, которая сжимает пружину 7. Вследствие перемещения втулки 5 изменяется величина зазора Л между якорем 9 и катущкой 11 датчика. Это изменение А пропорционально прогибу Azy и вызывает изменение коэффициеь та самоиндукции катушки датчика. Электрический сигнал, пропорциональный этому изменению, используется в САУ.
При изменении в процес ;е обработки параметров заготовки (припуска на обработку, твердости материала), затуплении .режущего инструмента происходит изменение силы резания и, следовательно, величины Л2уи А. В соответствии с этим САУ осуществляет соответствующую, корректировку хода процесса растачивания (например, изменение величины подачи).
Таким образом, изобретение позволяет получать информацию о ходе обработки по измерениям прогиба, вызванного действием равнодействующей радиальной и тангенциальной составляющих силы резания, что повыщает достоверность информации, точность и производительность обработки при упрощенной конструкции динамометрического узла.
Формула изобретения
Расточная динамометрическая оправка, содержащая полый корпус и индуктивный датчик, катушка которого закреплена на недеформирующейся части оправки, а подвижный якорь через передаточный механизм взаимодействует с деформирующейся частью, отличающаяся тем, что, с целью упрощения конструкции и повышения точности измерения, передаточный механизм выполнен в виде тросика, один конец которого закреплен с возможностью установочного перемещения в расточке деформирующейся части оправки, а на втором конце закреплена несущая якорь датчика втулка, имеющая возможность перемещаться в расточке недеформирующейся части оправки, причем втулка подпружинена в направлении катущки датчика.
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 323194, кл. В 23 В 35/00, 1971.
25
фиг. 2
