1
Изобретение относится к землеройиым машинам непрерывного действия.
Известны устройства для унравлення роторным траншейным экскаватором, включаюш,не приводы рабочего органа и хода экскаватора, уснлнтели и датчик скорости рабочего органа, блок управления приводом хода и пульт управления.
Такие устройства осундествляют заш,иту трансмиссии от опасных перегрузок с последующим отключением рабочего двигателя.
Цель изобретения - регулироваиие скорости хода экскаватора в зависимости от физико-мехаиических свойств разрабатываемого грунта.
Для этого в кинематическую цгиь нривода рабочего органа (ротора) включена электромагнитная порошковая муфта, обмотка управления которой соединена с усилнтелем нривода ротора, подключенным к датчнку скоростн ротора и к нульту унравления, причем к обмотке управления носледовательио подключен датчик тока, соедниенныл с блоком управления ирнводом хода экскаватора.
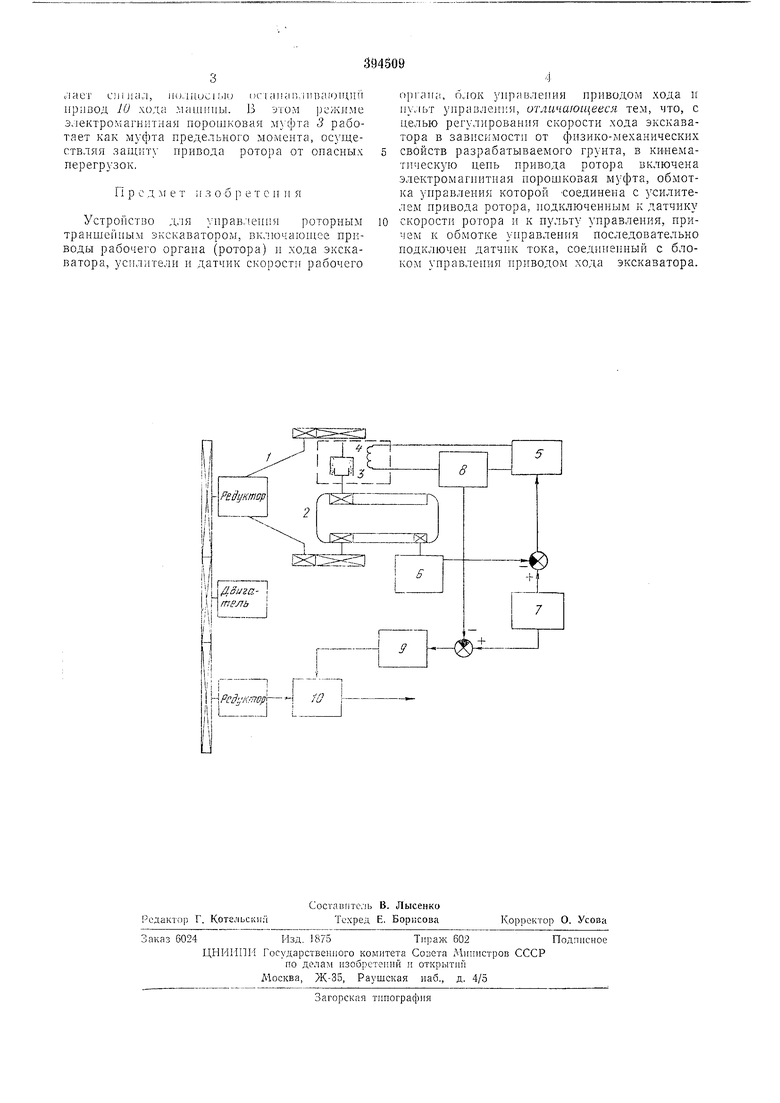
На чертеже нрнведена блок-схема предлагаемого устройства для управления роториы.м траншейным экскаватором.
Устройство состоит из привода 1 рабочего органа (ротора) 2, в кинематическую цепь которого включена электромагнитная порошковая муфта 3. Обмотка 4 управления муфты соединена с уснлителем 5 привода ротора, подключенным к датчику 6 скорости и к пульту 7 управления. К обмотке унравления последовательно подключен датчик 8 тока, соединенный с блоком 9 управления приводом 10 хода.
Устройство работает следуюш,пм образом.
При увеличении твердости грунта происходит увеличение нагрузки на ротор 2 п на вал порошковой муфты 3, что приводит к частичному проскальзыванию муфты и некоторому снижению скорости ротора. При этом уменьшается напряжение датчика 6 скорости ротора, увеличивается выходное Напряжение усилителя 5 привода ротора и ток в обмотке 4 муфты 3. Это вызывает увеличение рабочего момента муфты 3 и стабилизацию скорости ротора.
Увеличение тока в обмотке 4 муфты 3 приводит к увеличению выходного снгнала датчика 8 тока и уменьшенню суммарного входного сигнала блока 9 управления приводом хода, вызывающему уменьшение скорости передвижения экскаватора.
При встрече с непреодолимым препятствием ротор 2 останавливается. Напряжение датчика 6 скорости ротора падает до нуля, что приводит к резкому увеличению тока в обмотке 4 муфты управления. Датчик 8 тока посы3
c;iiii;i;i, iio.iiiuoit.iu i)ci;iii;iii/ii Bafoiuiin привод 10 xo;ia лиииииы. 13 утом pe/KjJMe электромагнитная порошковая муфта 3 работает как муфта предельного момента, осуществляя защиту привода ротора от опасных перегрузок.
П р с д -м е т изо б р е т с пня
Устройство для управления роторным траншейным экскаватором, включа ОН1ее приводы рабочего органа (ротора) н хода экскаватора, усилители н датчик скорости рабочего
opiaifa, блок управления приводом хода и пульт управления, отличающееся тем, что, с целью регулирования скорости хода экскаватора в зависимости от физико-механических свойств разрабатываемого грунта, в кинематическую пепь привода ротора включена электромагпптная норошковая муфта, обмотка управления которой Соединена с усилителем привода ротора, иодключенным к датчику скорости ротора и к пульту управления, причем к обмотке управления последовательно подключен датчик тока, (еппый с блоком управлепия приводом хода экскаватора.
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод роторного экскаватора | 1989 |
|
SU1710675A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПЕРЕДВИЖЕНИЕМ РОТОРНОГО ЭКСКАВАТОРА | 1970 |
|
SU286916A1 |
| Траншейный экскаватор | 1979 |
|
SU891859A1 |
| УСТРОЙСТВО для КОНТРОЛЯ РЕЖИМА РАБОТЫ МАШИН | 1971 |
|
SU290993A1 |
| УСТРОЙСТВО для ИЗМЕРЕНИЯ ПРОИЗВО,! РОТОРНОГО ЭКСКАВАТОРА.ИТЕЛЬНОСТИ | 1971 |
|
SU306355A1 |
| ЗАДАЮЩЕЕ УСТРОЙСТВО ПЕРЕМЕЩЕНИЙ РАБОЧЕГО ОРГАНА РОТОРНОГО ЭКСКАВАТОРА | 1972 |
|
SU349982A1 |
| Траншейный экскаватор | 1977 |
|
SU751919A1 |
| Рабочий орган траншейного экскаватора | 1988 |
|
SU1571148A1 |
| РОТОРНЫЙ ЭКСКАВАТОР | 1969 |
|
SU244209A1 |
| ПРИВОД РАБОЧЕГО ОРГАНА | 1971 |
|
SU290996A1 |
Г Ред ;/ Тге/ - - fff
111:I 1
