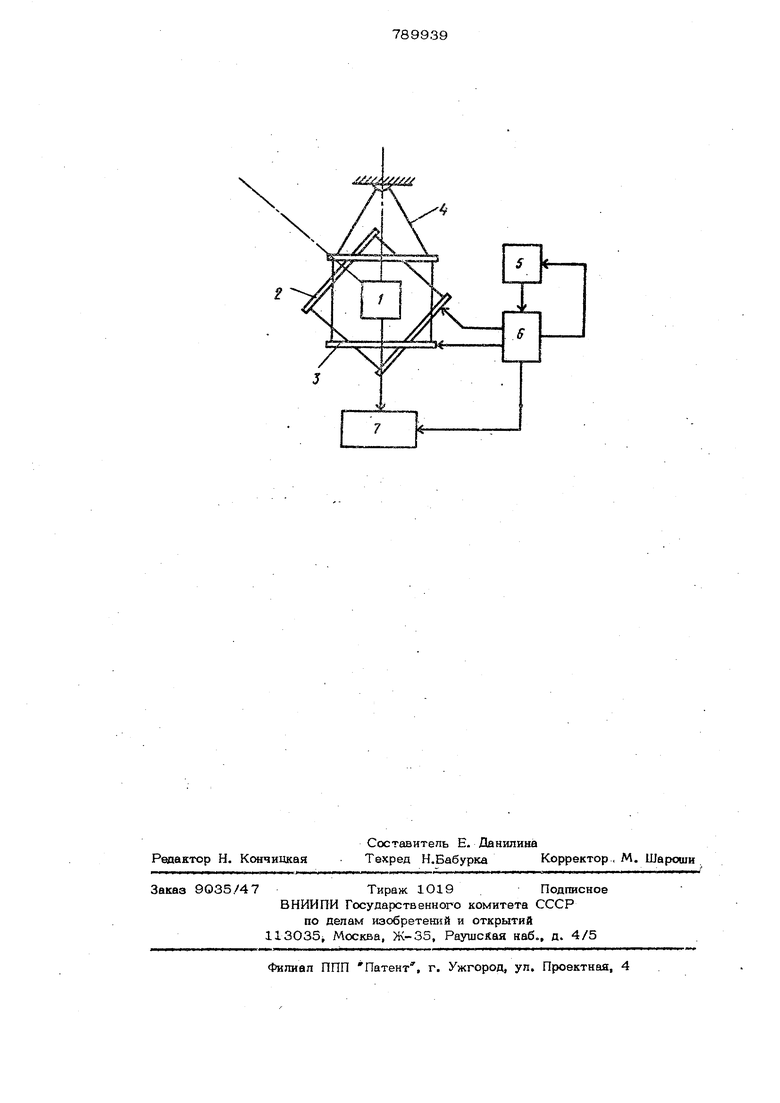
Изобретение относится к техническим средствам, используемым для проведения геофизических исследований, и предназначено для определения пространственно-вре менного распределения геомагнитного пол автоматически как в полевых, так и стационарных условиях, а также может быть использовано для определения пространств венного положения подвижных объектсв, например судов относительно магнитного меридиана. Известны устройства для определения элементе геомагнитного поля, включающие магнитные системы, в которых раэМйцен квантсжый датчик, причем магнит ные системы размещают так относительно геомагнитного поля, чтобы отсутствовал сигнал определенной гармоники низкой частоты, характеризующей суммарный модуль магнитного поля l . Из-за наличия многокомпонентных контуров и следящих систем эти устройства сложны в техническом исполнении и неудо ны для использования в автоматизированных системах. Известно также устройство для определения элементов геомагнитного поля, содержащее квантовый датчик, магнитную систему, стабилизируемую в пространстве маятниковым подвесом , источник тока, блок управления и вычислительный блoкi первый вход которого соединен с кванто вым датчиком, а второй - с первым выходом блока управления, вторым выходом связанного со входом источника тока, выходом подключенного к магнитной системе, блок разворота магнитной систа,(ы в вертат кальной плоскости, входом соединенного с выходом вычислительного блока, третий вход которого связан с выходом источника тока 2 1. Однако, наличие в устройстве вращаюигахся частей и необходимость задания в процессе измерений определенного положения магнитной системы в пространстве снижает точность и быстродействие устройства иэ-за возникающих люфтсж и износа ПОДВИЖНЫХ частей, и временных затрат на осущеспвпение пpoгpaм fнorp разворота. Цепь изобретения - псжышение точности и быстродействия определения элементов геомагнитного попя. Поставленная цель достигается тем, что устройство для определения элементов геомагнитного попя, содержащее квантовый -датчик, магнитную систему, стабилизируемую в направлении местной вертикали маятниковым подвесом, источник тока, блок управления и вычислительный блок, первый вход которого соединен с квант(жым датчиком, а второй - с первь1М выходом блока управления, снабжено в тороймагнитной сист«у1Ой, жестко связанной с переой магнитной системой и развернутой относитель но нее в вертикальной плоскости на угол меньший /2, причем второй и третий выходы блока управления подключены ко входам обетгх магнитных систем, четвертый его выход связан со входом источника тока, выход которого соединен со входом блока управления. На чертеже предст лена структурная данного устройства. Устройство содержит квант(жый датчик 1, магнитные систалы 2 и 3, стабилизируемые в пространстве маятниковым под-весом 4, источник тока 5, бпок управпения 6, вычислительный блок 7, 11е{®ый вход которого соединен с квантовым датчиком 1, а второй - с первым выходом блока управления 6, вторым и третьим выходом подключенного ко входу источник тока 5, соединенного со входом блока управления 6. Устройство работает следующим образом. Маятник юый подвес 4 стабилизирует магнитные системы 2 и 3 в определенном положении в пространстве. По команде с блока управления 6 включается вычислите ный блок 7 и изменяется ток в магнитной системе 3 от источника тока 5. Вычислительный блок 7 регистрирует сигнал с кБантс ого датчика 1 и запоминается им, когда значение сигнала достигает минимума. Значение этого сигнала соответствует значению горизонтальной составляющей геомагнитного поля Земли. После этого блоком управления 6 ко входу магнитной системы 2 подключаетсяИСТОЧНИК тока 5, и операция компенсации повторяется. Блок управления 6 в дальнейшем отключает источник тока 5 от магаитных систем 2 и 3, при этом вычислительный блок 7 регистрирует сигнал с квантового датчика 1, соотг ветствующий модулю геомагнитного поля, после чего вычислительный 6noit 7 производит расчет элементов поля, которые передаются на средства регистрации. Проведение многократных измерений позволяет судить о вариациях эло дентов магаитного поля Земли. Таким образом, введение в устройство магнитной системы, жестко связанной с исходной магнитной систолой и развернутой относительно нее на угол в вертикальной плоскости меньший . поселяет исключить программный разворот магнит ной cиcтйv ы, отказаться от использсеавия подвижных элементов. Формула изобретения Устройство для определения элолентсв геомагнитного поля, содержащее квантовый датчик, магнитную систему, стабилизируемую в направлении местной вертикали маятниковым подвесом, источник тока, блок управления и вычислительный блок, первый вход которого соединен с квантовым датчиком, а второй - с первым выходом блока упр 1вления, о т л и ч а ю- щ е е с я тем, что, с целью повьпиения точности и быстродействия определения элементов геомагнитного поля, оно снабжено второй ма1нитной системой, жестко связанной с первой магнитной системой и развернутой относительно нее в вертикальной плоскости на угол меньший , причем второй и третий выходы блока управления подключены ко входам обеих магнитных систем, четвертый его выход связан со входом источника тока, выход KOTopc.xj соединен со входом блока управления. Источники информации, принятые во внимание при экспертизе 1.Компонентный квантовый магнитометр КМ-3 Мервдиан. ТО СКВ ФП ИЗМИР АН СССР, 1975. 2.Авторское свидетельство СССР № 620921, кл. 6 01 R 33/00, 1978.:
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения магнитной индукции | 1980 |
|
SU892371A1 |
| Устройство для измерения угловых перемещений | 1980 |
|
SU920364A1 |
| Квантовый компонентный магнито-METP | 1979 |
|
SU819778A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВОГО ПОЛОЖЕНИЯ БУРОВОЙ СКВАЖИНЫ (ЕГО ВАРИАНТЫ) | 2004 |
|
RU2261324C1 |
| Система стабилизации изображения на подвижном основании | 2019 |
|
RU2753162C2 |
| Устройство автоматического регулирования постоянного тока | 1980 |
|
SU909665A1 |
| Компонентный магнитометр | 1979 |
|
SU824099A1 |
| Способ сброса кинетического момента инерционных исполнительных органов космического аппарата и устройство для реализации способа | 2015 |
|
RU2625687C2 |
| УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОГО ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ОБЪЕКТА (ЕГО ВАРИАНТЫ) | 1996 |
|
RU2103664C1 |
| СПОСОБ ОПЕРАТИВНОГО ПРОГНОЗА ЗЕМЛЕТРЯСЕНИЙ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2012 |
|
RU2507546C1 |