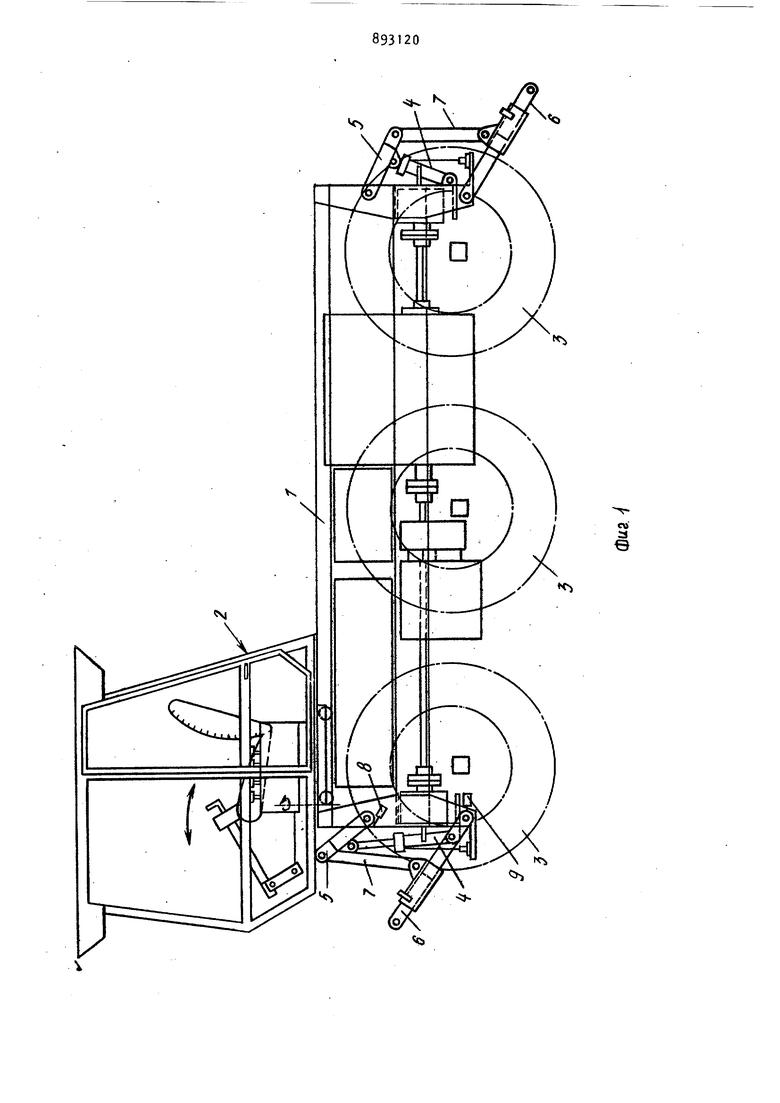
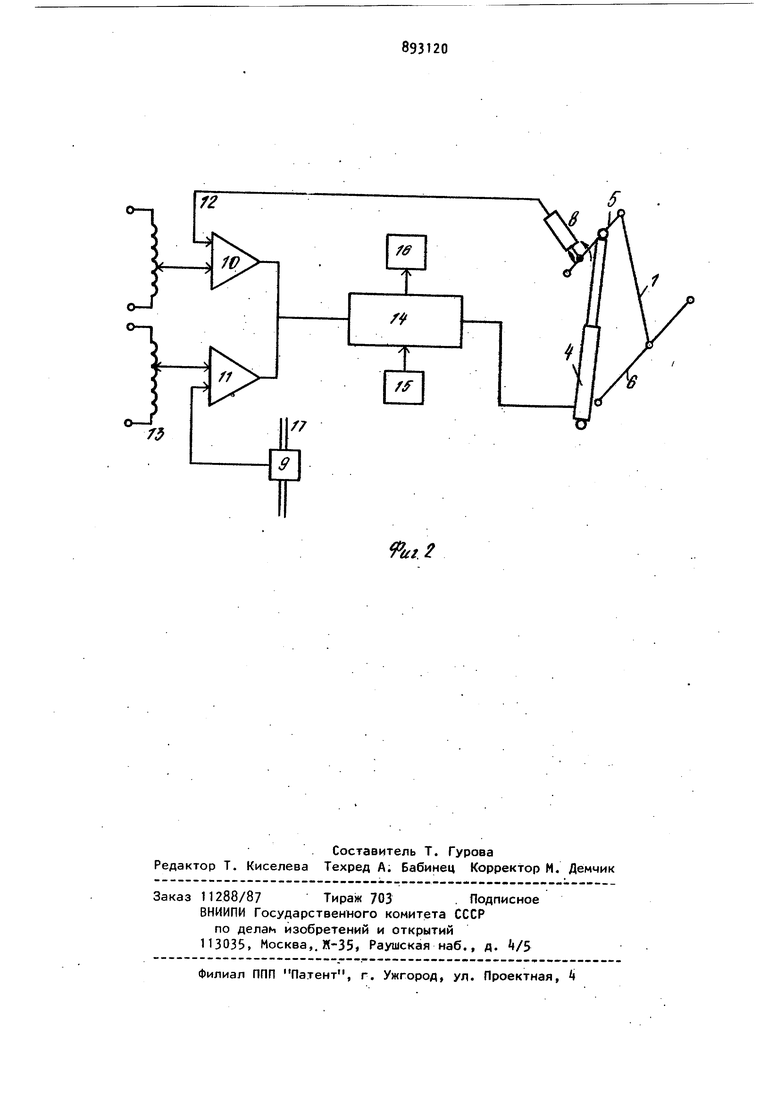
Тягач состоит из шасси 1 с кабиной 2 водителя, установленного на ведущих колесах 3 Тягач может перемещаться в двух противоположных направлениях, в связи с чем кабина 2 водителя установлена на шасси 1 с возможностью поступательного перемещения вперед и назад по шасси 1, а пульт управления ((не показан) , раз мещенный в кабине водителя, установлен с возможностью поворота относительно вертикальной оси на 180. Таким образом при любом направлении движения тягача водитель всегда обращен лицом к обрабатываемому участку. На шасси 1 установлено шарнирно и с возможностью перемещения под дей ствием гидроцилиндра 4 навесное устройство, состоящее из двух верхних 5 и двух нижних 6 рычагов, которые сое динены попарно распорками 7. Верхние рычаги 5 связаны между собой и снабжены датчиком 8 положения, а нижние рычаги 6 соединены изгибным стержнем (не показан) , который снабжен датчиком 9 усилия. Датчики положения 8 и усилия 9 связаны с гидроцияиндром j посредством регулятора, выполненного в виде электрического блока, состоящего из двух усилителей 10 и П с дв мя входами каждый, и имеет органы контроля, установленные в кабине водителя, включаюцие два потенциомет ра 12 и 13. Один вход усилителя 10 соединен с датчиком 8 положения, а другой - с потенциометром 12 управления положением. Один вход усилителя 1 1 соединен с датчиком 9 усилия а другой - с потенциометром 13 управления усилием. Так как органы контроля установлены в кабине 2 водителя, он может осуществлять регули ровку величин на потенциометре 12 и 13. Выход усилителей 10 и 11 соединен с одним входом электрического уп равления гидравлического распределителя 14. Другой вход гидравлического распределителя 15 соединен с насосом 15 а выходы - с гидроцилиндром Ц и масляным баком 16. Датчик 9 усилия может быть выполнен в виде датчика давления, который размещен на магистрали 17 гидравлического питания двигателя ведущих ко лес 3. Автоматическое регулирование осуществляется следующим образом. 04 Управление системой контроля положения, определяемого датчиком 8 положения, связанным с верхними рычагами 5 обеспечивается при помощи электрического блока автоматического регулирования. Это регулирование осуществляется с одной стороны по сигналам датчика 8 положения, а с другой стороны - по сигналам, соответствующим величине, устанавливаемой водителем на органе контроля положения потенциометре 12, находящемся в кабине 2. Таким образом, водитель устанавливает необходимую величину на органе контроля положением - потенциометре 12 и гидравлический распределитель 1 запитывает подъемный гидроцилиндр 4. Когда гидроцилиндр k устанавливается в заданное положение, величина сигнала, выдаваемого датчиком 8 положения, становится такой, что электрический блок выдает команду на закрытие гидравлического распределителя Ц, Управление системой контроля усилия также осуществляется через электрический блок автоматического регулирования. Это регулирование осуществляется с одной стороны по сигналам датчика 9 усилия, установленного на изгибном стержне (не показан) , соединяющим нижние рычаги 6 навесного устройства, а с другой стороны - по сигналам, соответствующим величине, устанавливаемой водителем на органе контроля усилия - потенциометре 13, находящимся в кабине 2. На потенциометре 13 устанавливают величину Е, которой соответствует сигнал е, посылаемый в электрический блок. Если продольный изгиб изгибного стержня становится таким значительным, что связанный с ним датчик 9 усилия выдает величину еХ е, электрический блок выдает команду на открытие гидравлического распределителя 4 и вызывает подъем нижних рычагов 6t вследствие чего уменьшается тянущая сила. Когда ведичина , электрический блок выдает команду на закрытие гидрораспределителя 15. В случае, когда датчик 9 усилия выполнен в виде датчика давления, он выдает напряжение, пропорциональное давлению рабочего тела, подаваемого в двигатели (не показаны) привода ведущих колес 3, т.е. пропорциональ58
но усилию сопротивления, прикладываемого к ведущим колесам 3 навесными орудиями, установленными на тягаче. При этом величина этого усилия сравнивается в усилителе 11 с величиной, установленной водителем на .потенциометре 13. Если величина, снимаемая с датчика Э усилия в виде датчика давления, превышает величину, установленную водителем на потенциометре 13, электрический блок выдает команду на открытие гидравлического распределителя I, в резулыату чего обеспечивается подъем нижних рычагов б, и| следовательно, уменьшения тянущего или толкающего усилия.
Когда величина, снимаемая с датчика 9 усилия в виде датчика давления, возвращается к заданному уровню, электрический блок выдает команду на закрытие гидравлического распределителя Ц,
Таким образом, навесное устройство постоянно возвращается в ранее выбранное положение.
Предлагаемое изобретение гювышает надежность автоматического регулирования навесного устройства.
Формула изобретения
1. Тягач с системой автоматического регулирования навесного устройства
204
включающий шасси с кабиной водителя, навесное устройство с установленным на шасси шарнирно и с возможностью перемещения под действием гидроцилиндра рычагом, датчик усилия и датчик положения рычага, причем оба датчика связаны с гидроцилиндром посредством регулятора, отличающийсятем, что, с целыэ повышения надежности автоматического регулирования, регулятор выполнен в виде электрического блока с четырьмя входами, один вход которого соединен с датчиком усилия, а другой - с датчике положения, а выход с гидроцилиндром, и имеет органы контроля, которые размещекш в кабине водителя и соедиие «|| с двумя входами электри ческого блока.
2. Тягач поп,,, отличающийся тем, что датчик усилия выполнен в виде датчика давления и past мещен на магистрали гидравлического питания двигатеяя ведущих колес.
Источники информации, принятые во внимание экспертизе
1.Патент ст № 33885)$. кл. 72-7, 1975.
2.Патент Франции (Р f603950 кл. А 01 В , t97 (прототип).
е
::l в
72
W
n
/7
/.
fff
/
/
/
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ АГРЕГАТОМ НА ПЕРЕСЕЧЕННОЙ МЕСТНОСТИ | 1988 |
|
RU2100219C1 |
| ГУСЕНИЧНЫЙ ТРАНСПОРТЕР | 2003 |
|
RU2260541C2 |
| КОЛЕСНЫЙ ЭЛЕКТРОМЕХАНИЧЕСКИЙ ТЯГАЧ | 1993 |
|
RU2096234C1 |
| РЕГУЛИРУЮЩЕЕ УСТРОЙСТВО, СИСТЕМА ОБТЕКАТЕЛЯ, БЛОК УПРАВЛЕНИЯ И УСТРОЙСТВО ДЛЯ УМЕНЬШЕНИЯ СОПРОТИВЛЕНИЯ ВОЗДУХА У АВТОПОЕЗДА | 2005 |
|
RU2379210C2 |
| СИСТЕМА АКТИВНОЙ ВИБРОЗАЩИТЫ И СТАБИЛИЗАЦИИ | 2008 |
|
RU2406620C2 |
| ЭНЕРГОСБЕРЕГАЮЩЕЕ УСТРОЙСТВО БУКСИРОВЩИКА | 2005 |
|
RU2289532C1 |
| МАЛОГАБАРИТНЫЙ ЭЛЕКТРОПОГРУЗЧИК | 2012 |
|
RU2539442C2 |
| Малогабаритный буксировщик воздушных судов с дистанционным управлением | 2015 |
|
RU2645175C2 |
| ТРЕХОСНОЕ КРАНОВОЕ ШАССИ | 2018 |
|
RU2684840C1 |
| Мобильное энергетическое средство | 1985 |
|
SU1258754A1 |