(5) УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ
I
Изобретение относится к поливу сельскохозяйственных культур и быть использовано при управлении запорными органами оросительных систем.
Известно устройство дистанционного управления запорными органами оросительных систем, включающее корпус с напорной полостью, гидроуправляемый распределитель с программным устройством, мембранный привод, выполненный с золотниковым регулятором, рабочая полость которого сообщена с напорной полостью клапана 1.
Недостатком известного устройства является круговая программа включения и выключения клапана, что затрудняет выборочное включение заданного клапана.
Наиболее близким к предлагаемому является УСТРОЙСТВО для дистанционного управления запорными органами, включающее командный двигатель, взаимодействующий посредством подпруЗАПОРНЫМИ ОРГАНАМИ ОРОСИТЕЛЬНЫХ СИСТЕМ
жиненной фигурной штанги с рычаНом, реле времени и программным элементом избирательного запорного органа, снабженного возвратными пружинными упорами и толкателем, контактирующим с переключателем распределителя 2j.
Недостатком известного устройства является то,, что оно не обеспечивает независимой работы запорного органа при подаче незапрограммирован10ных команд, так как обеспечивая выборочное включение одного запорного клапана, оно при последующей подаче командных импульсов выключает ранее включенные.
15
Цель изобретения - обеспечение независимой работы запорного органа при подаче незапрограммированных команд.
Указанная цель достигается тем,
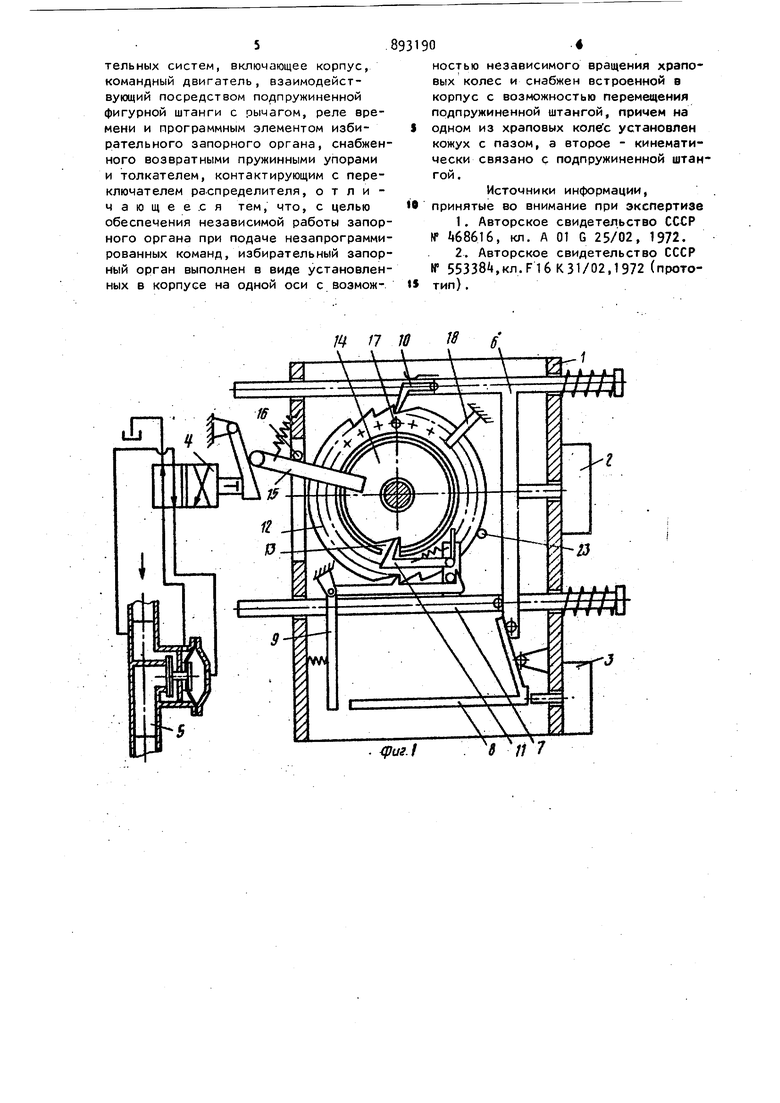
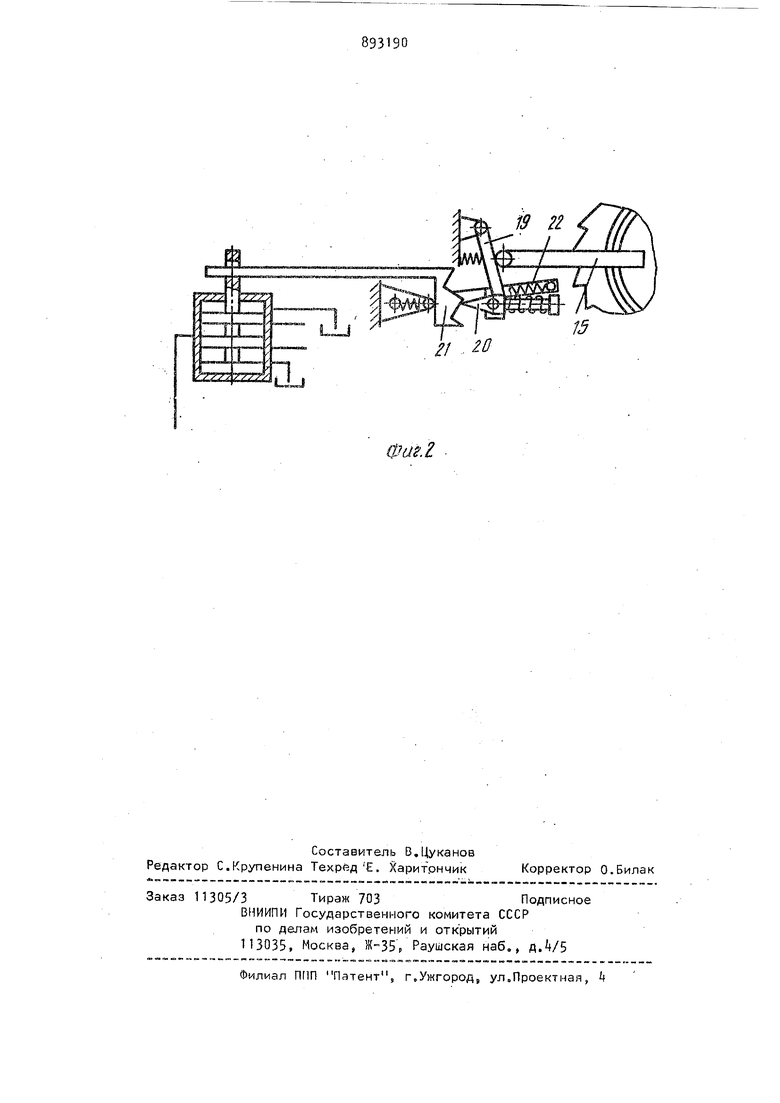
20 что избирательный запорный орган выполнен в виде установленных в кор- . пусе на одной оси с возможностью независимого вращения храповых колес и 3 снабжен встроенной в корпус с возмож ностью перемещения подпружиненной штангой, причем на одном из храповых колес установлен кожух с пазом, а второе - кинематически связано с под пружиненной штангой. На фиг.1 дана конструктивная схема устройства и его гидравлическая связь с запорным органом; на фиг.2 конструктивная схема переключателя положения ходов распределителя. Устройство для дистанционного управления запорными органами имеет корпус 1, на котором установлены командный двигатель 2, реле 3 времени распределитель Ц, гидравлически связанный с запорным органом 5. Двигдтель 2 обеспечивает возвратно-поступательное движение фигурной штанги 6, кинематически связанной .со штанго 7 и рычагом 8 и контактир5 1цей с запором 9. Штанги б и 7 снабжены собачками 10 и 11, входящими в зацепление с элементами избирательного органа, Смонтированного в корпусе 1 и состоя щего из храпового колеса 12, имеющего кожух с пазом 13 колеса 1k с толкателем 15 и упоров 16 и 17. Коле са 12 и 1 имеют общую ось, независи мое друг от друга вращение и возврат ные пружины (не показаны), причем колесо 14 встроено в кожухе и обеспечивает взаимодействие толкателя 15 с переключателем гидравлических ходо распределителя 4. Вращение колеса 14 (с толкателем 13) ограничено упором 16. Переключатель гидравлических ходо включает в себя рычаг 19 со встроенным на шарнире подпружиненным коническим элементом 20, поочередно контактирующим с каждой из двух наклонных плоскостей шарнирно установленного рычага 21, который имеет гибкую силовую связь с основанием шарнира посредством пружины 22. Работает устройство следующим образом. Устройство включается в работу подачей команды на двигатель 2. При этом штанг-а 6 приходит в движение . и собачка 10 поворачивает колесо 12 на заданный угол (на один зуб).Одновременно с поворотом колеса 12 рычагом 8 взводится реле 3 которое обеспечивает задержку возвратных ходов колеса 12 и штанги 7 в интервале времени между двумя командами. 0-4 Настройка программы работы устройства (включения и выключения запорного органа) производится установкой паза 13 относительно точки зацепления колеса 14 с собачкой 11 посредством упоров 17 и 18. Например, для программы, составленной .из трех команд, паз 13 смещается на 3 зуба колеса 12 относительно места зацепления собачки 12 с колесом 14. При соответствии программы количеству поданных команд колесо 12 с кожухом поворачивается на заданный угол, обеспечивая совпадение паза 13 с собачкой 11 и ее зацепление с колесом 14. Подача команд прекращается. Срабатывает реле 3 и рычаг 8 выводит запор 9 из зацепления со штангой 7. Штанга 7 под действием возвратной пружины возвращается в исходное положение, а собачка 11 поворачивает колесо 14 с толкателем 15, который взаимодействует с переключателем. В результате этого конический элемент 20 входит в контакт с наклонной плоскостью рычага 21 и приводит его в одно из двух устойчивых положений, при KojofSoM происходит смена гидравлических ходов распределителя, т.е. перераспределение потока жидкости, обеспечивающее включение или выключение органа 5 После этого собачка 11, входя в контакт с упором 23, выводится из зацепления и колеса 12 и 14 возвращаются в исходное положение действием возвратных пружин.. При несоответствии программы количеству поданных команд устройство не воздействует на запорный орган. Если число команд меньше запрограммированного, совпадение паза 13. с собачкой 11 не происходит, так как колесо 12 поворачивается на угол, меньший заданного. Если число команд превышает запрограммированное, то в одном из положений колеса 12 происходит совпадение паза 13 с собачкой 11. Однако в результате дальнейшей подачи команд паз 13, продолжая движение, действует торцовой поверхностью на скос собачки 11 и выводит ее из зацепления с колесом 14, исключая взаимодействие толкателя 1 5 с переключателем. Формула изобретения Устройство для дистанционного управления запорными органами оросительных систем, включающее корпус, командный двигатель, взаимодействующий посредством подпружиненной фигурной штанги с рычагом, реле времени и программным элементом избирательного запорного органа, снабженного возвратными пружинными упорами и толкателем, контактирующим с переключателем распределителя, отличающееся тем, что, с целью обеспечения независимой работы запорного органа при подаче незапрограммированных команд, избирательный запорный орган выполнен в виде установленных в корпусе на одной оси с возможностью независимого вращения храповых колес и снабжен встроенной в корпус с возможностью перемещения подпружиненной штангой, причем на одном из храповых колене установлен кожух с пазом, а второе - кинематически связано с подпружиненной штам гой.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР ff i 686l6, кл. А 01 G 25/02, 1972.
2.Авторское свидетельство СССР Н 553384,кл.Р 16 К31/02,1972 (прототип) .
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматический клапан для закрытых оросительных систем | 1981 |
|
SU1033078A1 |
| Устройство для дистанционного управления водовыпусками оросительных систем | 1980 |
|
SU862865A1 |
| АВТОМАТИЧЕСКИЙ КЛАПАН ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ДЛЯ НАПОРНЫХ ТРУБОПРОВОДОВ | 1970 |
|
SU261060A1 |
| Автоматизированная система импульсного полива по бороздам | 1983 |
|
SU1189399A1 |
| Автоматизированная мелиоративная система | 1981 |
|
SU1035126A1 |
| Гидроавтоматическая задвижка для закрытых оросительных систем | 1987 |
|
SU1516062A1 |
| Устройство для управления запорными органами оросительной системы | 1986 |
|
SU1442139A1 |
| Устройство для измерения размера разгрузочной щели конусной дробилки | 1977 |
|
SU733725A1 |
| Устройство для загрузки и выгрузки изделий | 1985 |
|
SU1283184A1 |
| УСТРОЙСТВО для ТЕЛЕУПРАВЛЕНИЯ ГИДРОПРИВОДНЫМИ ЗАДВИЖКАМИ ЗАКРЫТЫХ ОРОСИТЕЛЬНЫХ СИСТЕМ | 1971 |
|
SU318769A1 |
/ /7 10 9 V; 7
fiZZ.i
LU
// . 0
Фа .1
