(54) СУДОВАЯ ЛЕБЕДКА


| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для передачи грузов между судами в море в условиях качки | 1982 |
|
SU1057368A1 |
| Спуско-подъемное устройство | 1977 |
|
SU701864A1 |
| Устройство для передачи грузов между судами в море в условиях качки | 1982 |
|
SU1049342A1 |
| ГИДРАВЛИЧЕСКАЯ СИСТЕМА СУДОВОГО КРАНА | 2003 |
|
RU2262464C2 |
| Лебедка для спуско-подъемных операций в море | 1990 |
|
SU1744056A1 |
| СПОСОБ УПРАВЛЕНИЯ ПОДЪЕМОМ ДВУХКОРПУСНОГО ПЛАВУЧЕГО ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2556135C1 |
| Система для безударной передачи гРузА C СудНА HA СудНО B уСлОВияХВОлНЕНия МОРя | 1979 |
|
SU816867A1 |
| Автоматическая система управления рулемСудНА | 1979 |
|
SU839859A1 |
| Устройство для передачи людей и грузов в море | 1972 |
|
SU490711A1 |
| Лебедка устройства гашения продольного раскачивания груза | 1971 |
|
SU502788A1 |
1
Изобретение относится к устройствам для обеспечения спуско-подъемных операций, используемых на судах при погрузочно-разгрузочных, швартовных и буксирных работах, связанных с плавсредствами, находящимися в открытом море, а также при перегрузочных работах между судами, между судном и берегом, между судном и летательным аппаратом.
Необходимость перегрузок в открытом море обусловлена истощением сырьевых ресурсов в прибрежных промысловых районах и освоением новых районов промысла в открытых морях и океанах для увеличения добычи рыбы. Эффективность такой добычи в значительной степени зависит от решения пробле.мы передачи грузов в море, так как предпочтительно, чтобы промысловые суда получали снабжение и сдавали улов при любой погоде непосредственно в районе промысла.
Проблема передачи грузов в море важна и для танкерного флота, для которого использование крупнотоннажных танкеров, экономически наиболее оправданных, может быть существенно расширено за счет оборудования их устройствами передачи нефти
в море на ходу на более мелкие суда, имеющие возможность заходить в порты с незначительной глубиной.
Дозаправка торговых судов топливом на ходу позволит увеличить объем перевозок полезного груза за счет снижения топливных запасов.
Передача грузов в открытом море производится чаще всего в условиях волнения. При этом передача грузов с одного объекта на другой не может быть произведена с по10мощью обычных грузовых стрел и грузовых кранов, та как они не обеспечивают слежения за взаимным положением груза и принимающего судна. При этом появляется опасность повреждения судов и грузов. Вследствие этого при использовании извест15ных средств nei terpy304Hbie операции производятся лищь при волнении до 4 баллов, а в районе Атлантики, например, в январе 35% времени волнение превыщает 4 балла. В результате процент времени, в течение
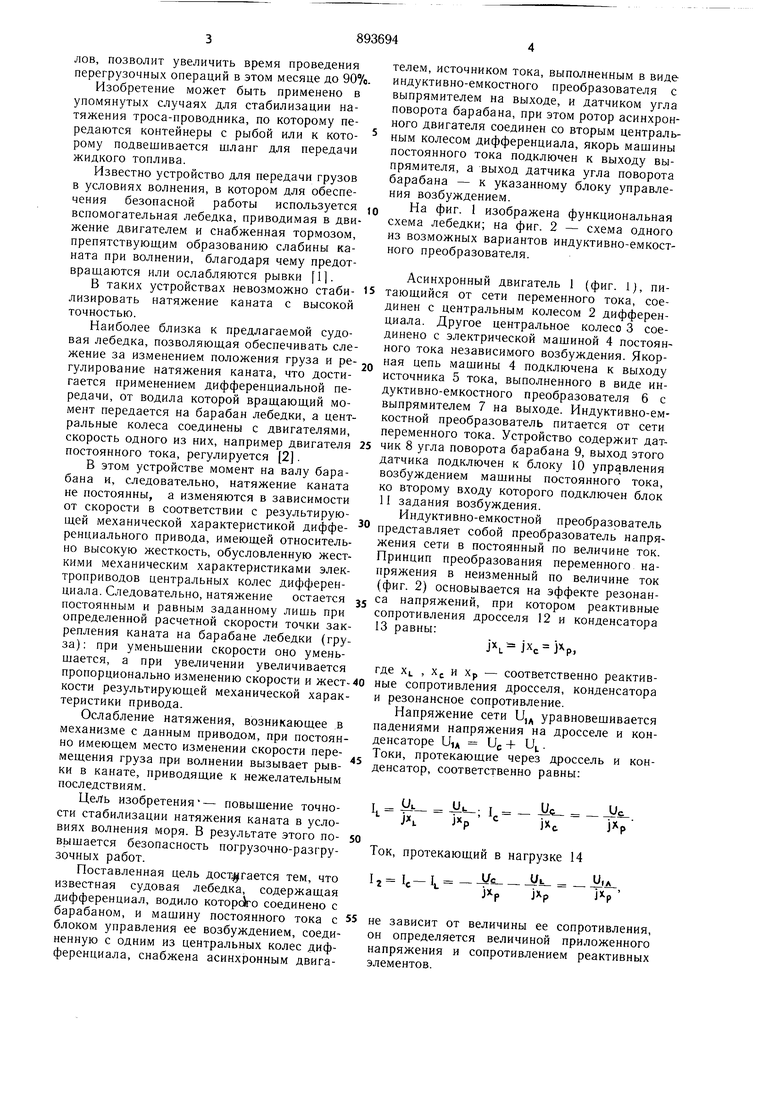
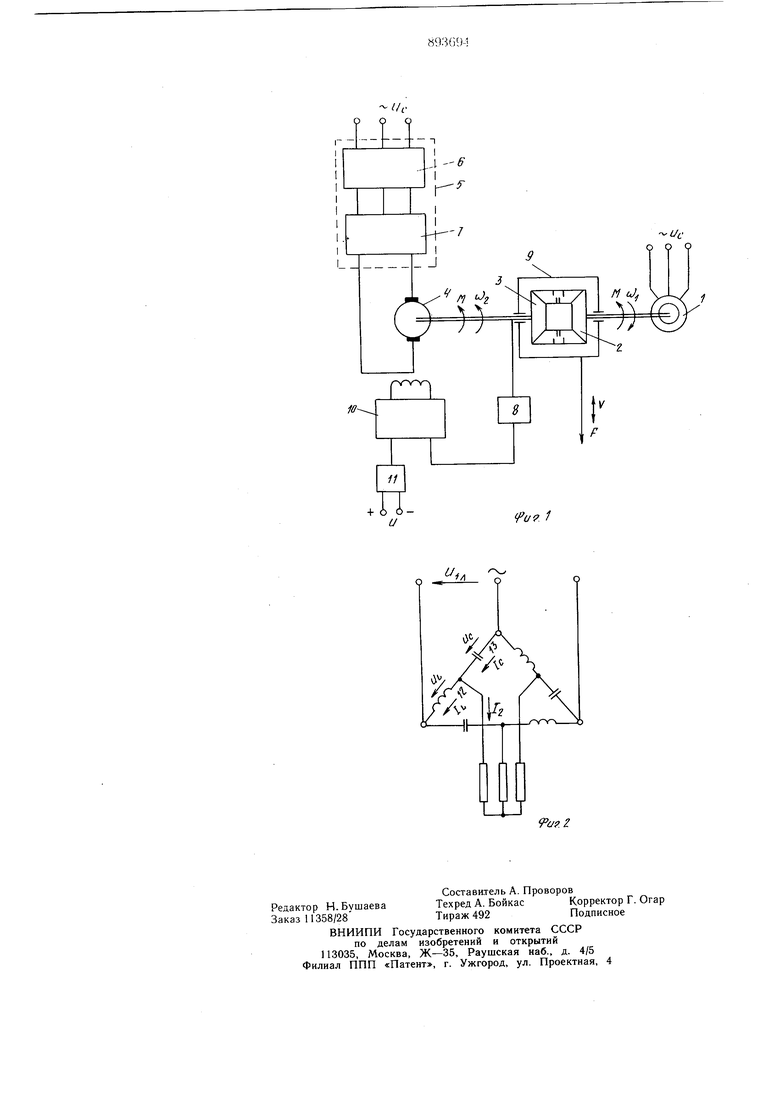
20 которого невозможно производить передачу груза, оказывается значительным. Применение устройств, позволяющих производить передачу груза при волнении до 7 баллов, позволит увеличить время проведения перегрузочных операций в этом месяце до 90% Изобретение может быть применено в упомянутых случаях для стабилизации натяжения троса-проводника, по которому передаются контейнеры с рыбой или к которому подвешивается шланг для передачи жидкого топлива. Известно устройство для передачи грузов в условиях волнения, в котором для обеспечения безопасной работы используется вспомогательная лебедка, приводимая в движение двигателем и снабженная тормозом, препятствуюш.им образованию слабины каната при волнении, благодаря чему предотвращаются или ослабляются рывки fl. В таких устройствах невозможно стабилизировать натяжение каната с высокой точностью. Наиболее близка к предлагаемой судовая лебедка, позволяюш,ая обеспечивать слежение за изменением положения груза и регулирование натяжения каната, что достигается применением дифференциальной передачи, от водила которой вращающий момент передается на барабан лебедки, а центральные колеса соединены с двигателями, скорость одного из них, например двигателя постоянного тока, регулируется 2. В этом устройстве момент на валу барабана и, следовательно, натяжение каната не постоянны, а изменяются в зависимости от скорости в соответствии с результирующей механической характеристикой дифференциального привода, имеющей относительно высокую жесткость, обусловленную жесткими механическим характеристиками электроприводов центральных колес дифференциала. Следовательно, натяжение остается постоянным и равным заданному лишь при определенной расчетной скорости точки зак репления каната на барабане лебедки (гру за) : при уменьшении скорости оно уменьщается, а при увеличении увеличивается пропорционально изменению скорости и жест кости результирующей механической харак теристики привода. Ослабление натяжения, возникающее в механизме с данным приводом, при постоянно имеющем место изменении скорости перемещения груза при волнении вызывает рывки в канате, приводящие к нежелательным последствиям. Цель изобретения- повышение точности стабилизации натяжения каната в условиях волнения моря. В результате этого повь1щается безопасность погрузочно-разгрузочных работ. Поставленная цель достигается тем, что известная судовая лебедка, содержащая дифференциал, водило KOTOpciro соединено с барабаном, и машину постоянного тока с блоком управления ее возбуждением, соединенную с одним из центральных колес дифференциала, снабжена асинхронным двигателем, источником тока, выполненным в виде индуктивно-емкостного преобразователя с выпрямителем на выходе, и датчиком угла поворота барабана, при этом ротор асинхронного двигателя соединен со вторым центральным колесом дифференциала, якорь машины постоянного тока подключен к выходу выпрямителя, а выход датчика угла поворота барабана - к указанному блоку управления возбуждением. На фиг. 1 изображена функциональная схема лебедки; на фиг. 2 - схема одного из возможных вариантов индуктивно-емкостного преобразователя. Асинхронный двигатель 1 (фиг. ), питающийся от сети переменного тока, соединен с центральным колесом 2 дифференциала. Другое центральное колесо 3 соединено с электрической машиной 4 постоянного тока независимого возбуждения. Якорная цепь мащины 4 подключена к выходу источника 5 тока, выполненного в виде индуктивно-емкостного преобразователя 6 с выпрямителем 7 на выходе. Индуктивно-емкостной преобразователь питается от сети переменного тока. Устройство содержит датчик 8 угла поворота барабана 9, выход этого датчика подключен к блоку 10 управления возбуждением мащины постоянного тока, ко второму входу которого подключен блок 11 задания возбуждения. Индуктивно-емкостной преобразователь представляет собой преобразователь напряжения сети в постоянный по величине ток. Принцип преобразования переменного напряжения в неизменный по величине ток (фиг. 2) основывается на эффекте резонанса напряжений, при котором реактивные сопротивления дросселя 12 и конденсатора 13 равны: Яи , где XL , Xj и Хр - соответственно реактивные сопротивления дросселя, конденсатора и резонансное сопротивление. Напряжение сети U, уравновешивается падениями напряжения на дросселе и конденсаторе UIA L/C + UL . Токи, протекающие через дроссель и конденсатор, соответственно равны; Ц У т Ut UL . I 1л - - ;. 1- - Ток, протекающий в нагрузке 14 1, VL.у; JXpJXp не зависит от величины ее сопротивления, он определяется величиной приложенного напряжения и сопротивлением реактивных элементов. Таким образом, ток, протекающий через нагрузку, имеет даже при переменной ее величине неизменную амплитуду, хотя направление его в течение периода питающего напряжения изменяется. Для выпрямления этого тока служит в устройстве выпрямитель, к которому подключается машина постоянного тока. Ток, протекающий в ее якоре, постоянен как по величине, так и по направлению. Датчик угла поворота барабана может иметь различное выполнение, которым определяется и место его установки. Это может быть фазорегулятор, вал которого связан с барабаном лебедки, а напряжение на его обмотке пропорционально углу поворота барабана. Это может быть также сельсин, датчик углового перемещения, импульсный датчик положения и т. д. Работает предложенная лебедка следующим образом. При спокойном море находящаяся на поверхности воды нагрузка неподвижна, следовательно, неподвижен и барабан лебедки. Момент на барабане лебедки определяется суммой моментов мащины постоянного тока и асинхронного Двигателя, равных между собой при симметричном дифференциале. Усилие в канате F остается постоянным, определяемым величиной тока в якоре мащины 4 и величиной ее потока возбуждения, и устанавливаемым на требуемом уровне с помощью блока 11 задания возбуждения. Скорость мащины постоянного тока равна скорости асинхронного двигателя 1 и определяется числом пар полюсов последней и частотой сети. При наличии волнения плавающий груз или поднимается на гребень волны или опускается на ее подощву. При этом в ивестных лебедках натяжение каната соответственно уменьшается или увеличивается. В системе источник тока - машина постоянного тока трос автоматически будет выбираться при подъеме груза на волне или стравливаться при его опускании. Причем пропорционально скорости перемещения груза на волне изменяется и угловая скорость вращения барабана. Скорость выходного вала дифференциала (скорость барабана) при встречном направлении вращения мащины 4 постоянного тока и двигателя 1 принята в предложенном устройстве: лс S2 Скорость CJ асинхронного двигателя 1 при изменении нагрузки на его валу изменяется незначительно,, вследствие жесткой механической характеристики. Скорость же мащины 4 постоянного тока изменяется существенно, определяясь алгебраической суммой скоростей двигателя 1 и двойного значения скорости барабана, в больщую или меньщую сторону относительно скорости (. Машина 4 постоянного тока выбирается таким образом, чтобы она работала всегда в двигательном режиме. Тогда при выбирании троса с высокой скоростью (высокая скорость вращения барабана лебедки) скорость мащины 4 невелика (CJ 2ц(-,) и потребляемая ею мощность, пропорциональная Ufl 1я поступает обратно в сеть через двигатель 1 вместе с мощностью Fy (F - натяжение каната, V - скорость волны), отдаваемой волной. При травлении троса мащина 4 вращается со скоростью cj cj, и отдает мощность на трос. Таким образом, применение двухдвигательного привода позволяет обеспечить возможность рекуперации в сеть энергии волны, что для автономных судовых сравнительно маломощных сетей существенно. При рекуперации энергии скорость асинхронного двигателя превышает синхронную, и он работает в генераторном режиме. Другое преимущество применения именно двухдвигательного дифференциального привода определяется возможностью компенсации трения в механических передачах, т. е. исключения его влияния на точность поддержания натяжения. Это обусловлено следующим. Момент нагрузки (вес груза) в лебедке постоянен по знаку. Момент трения изменяет свой знак при изменении направления вращения механизма. Поэтому результирующий момент нагрузки Mj. ,определяемый алгебраической суммой момента от веса груза и момента трения, будет иметь разную величину при разных направлениях вращения механизма. Изменение величины момента нагрузки приводит к больщим отклонениям натяжения каната. Наглядно это можно пояснить с помощью зависимости натяжения каната от скорости волны, которая без учета момента трения имеет вид эллипса, а при наличии момента трения части полуэллипсов сдвигаются относительно друг друга на величину 2 F. Естественно, что разброс натяжений AF во втором случае существенно выще. В предложенном дифференциальном двухдвигательном приводе при изменении направления вращения барабана .мащина постоянного тока, асинхронный двигатель и центральные колеса дифференциала не меняют направления своего вращения, в связи с чем не изменяется также и направление момента трения в этих звеньях. Следовательно, изменение натяжения каната при волнении будет обуславливаться лишь динамической составляющей усилия « S «5 S где I - суммарный момент инерции мащины постоянного тока, асинхрон ного двигателя и механизма; 5 угловое ускорение барабана; г - радиус барабана. Так как волна имеет характер, близкий к гармоническому, то путь, проходимый частицей волны (соответственно, и точкой закрепления каната на барабане лебедки), Y -у coscJt, где Н - высота волны; ui -угловая частота волны. Скорость волны (скорость перемещения точки закрепления каната- на барабане лебедки) математически выражается производной от величины перемепдения |..2Ssin(Jt tjsin cjt : - sin cot. Ускорение точки закрепления каната на барабане а - uJcosuit - ( cosUt. Отсюда следует, что перемещение точки закрепления каната на барабане лебедки имеет тот же характер, что и ускорение этой точки. Для компенсации динамической составляющей усилия момент, развиваемый мащиной постоянного тока в предложенном устройстве, изменяется по величине в соответствии с перемещением груза на волне. При подъеме груза на волне и выбирании каната он увеличивается, а при опускании груза на волне уменьщается. Обеспечивается это введением датчика угла поворота барабана, сигнал на выходе которого изменяется пропорционально величине отклонения от некоего нейтрального положения, имеющего место при спокойном море и неподвижном грузе и барабане лебедки. Когда груз находится на верщине волны, сигнал на выходе датчика имеет максимальное значение одного знака, а при его нахождении на подощве - максимальный сигнал другого знака. При другой высоте волны амплитудное значение сигнала на выходе датчика будет другим. При перемещении груза на волне сигнал на выходе датчика изменяется от одного конечного значения до другого. При подаче сигнала с датчика угла поворота с соответствующим знаком на блок управления возбуждением, где он алгебраически суммируется с сигналом задания, изменяется по гармоническому закону и ток возбуждения мащины постоянного тока, а следовательно, и ее момент, чем обеспечивается компенсация динамической составляющей усилия в канате. Период изменения сигнала на выходе датчика угла поворота барабана совпадает с периодом волны. Таким образом, применение двухдвигательного привода лебедки с источником тока для питания якоря мащины постоянного тока и введение обратной связи по углу поворота барабана обеспечивают существенное уменьщение величины отклонения натяжения каната от заданного. Формула изобретения Судовая лебедка, содержащая дифференциал, водило которого соединено с барабаном, и мащину постоянного тока с блоком управления ее возбуждением, соединенную с одним из центральных колес дифференциала, отличающаяся тем, что, с целью повыщения точности стабилизации натяжения каната в условиях волнения моря, лебедка снабжена асинхронным двигателем, источником тока, выполненным в виде индуктивно-емкостного преобразователя с выпрямителем на выходе, и датчиком угла поворота барабана, при этом ротор асинхронного двигателя соединен со вторым центральным колесом дифференциала, якорь мащины постоянного тока подключен к выходу выпрямителя, а выход датчика угла поворота барабана - к указанному блоку управления возбуждением. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 476203, кл. В 63 В 27/08, 1971. 2.Авторское свидетельство СССР № 366116, кл. В 63 В 27/08, 1969 (прототип).
