(54) СПУСКО-ПОДЪЕМНОЕ УСТРОЙСТВО
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для передачи людей и грузов в море | 1976 |
|
SU602404A1 |
| Устройство для спуска и подъема людей и грузов с судна на судно в море | 1981 |
|
SU988649A2 |
| Судовое спуско-подъемное устройство | 1975 |
|
SU604742A1 |
| Устройство для спуска и подъема людей и грузов с судна на судно в море | 1977 |
|
SU747769A1 |
| Система для безударной передачи гРузА C СудНА HA СудНО B уСлОВияХВОлНЕНия МОРя | 1979 |
|
SU816867A1 |
| Система для безударной передачи груза с судна на судно в условиях волнения моря | 1982 |
|
SU1030249A1 |
| Устройство для передачи людей и грузов в море с обслуживающей платформы на судно | 1981 |
|
SU954320A1 |
| Устройство для спуска и подъема людей и грузов с судна на судно в море | 1976 |
|
SU660889A1 |
| Следящее устройство к судовым кранам для безударной передачи груза с одного судна на другое | 1978 |
|
SU765103A1 |
| СУДОВОЙ КРАН | 2002 |
|
RU2241633C2 |
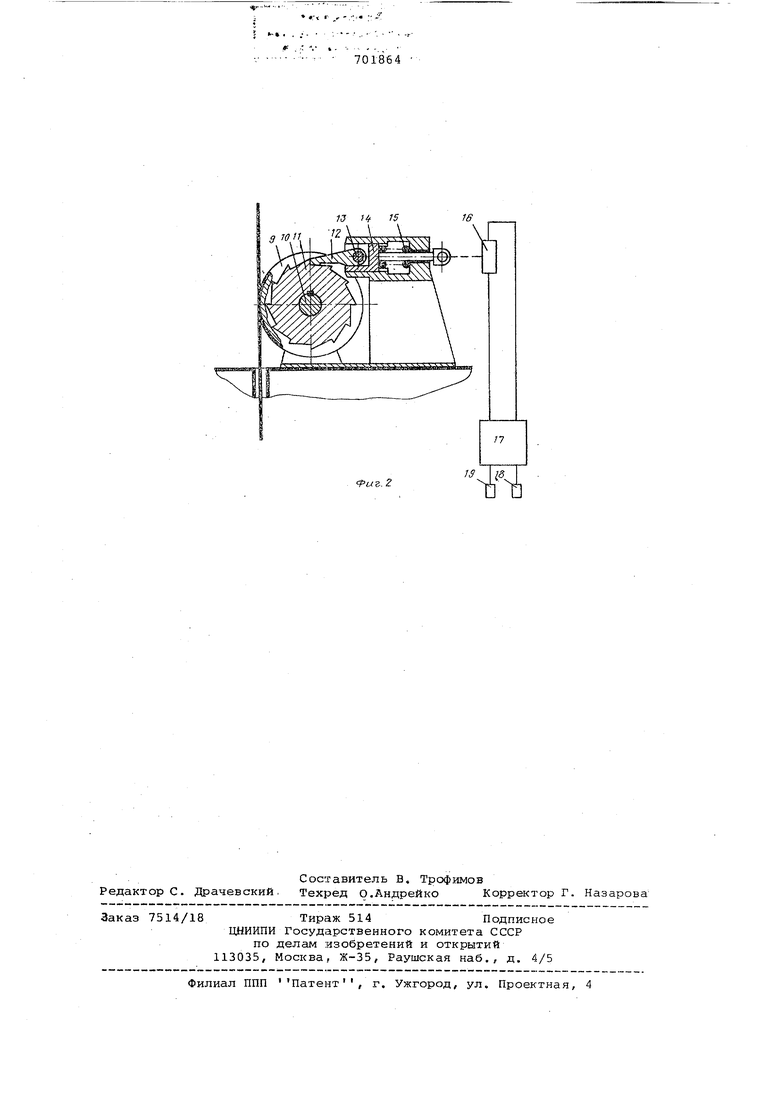
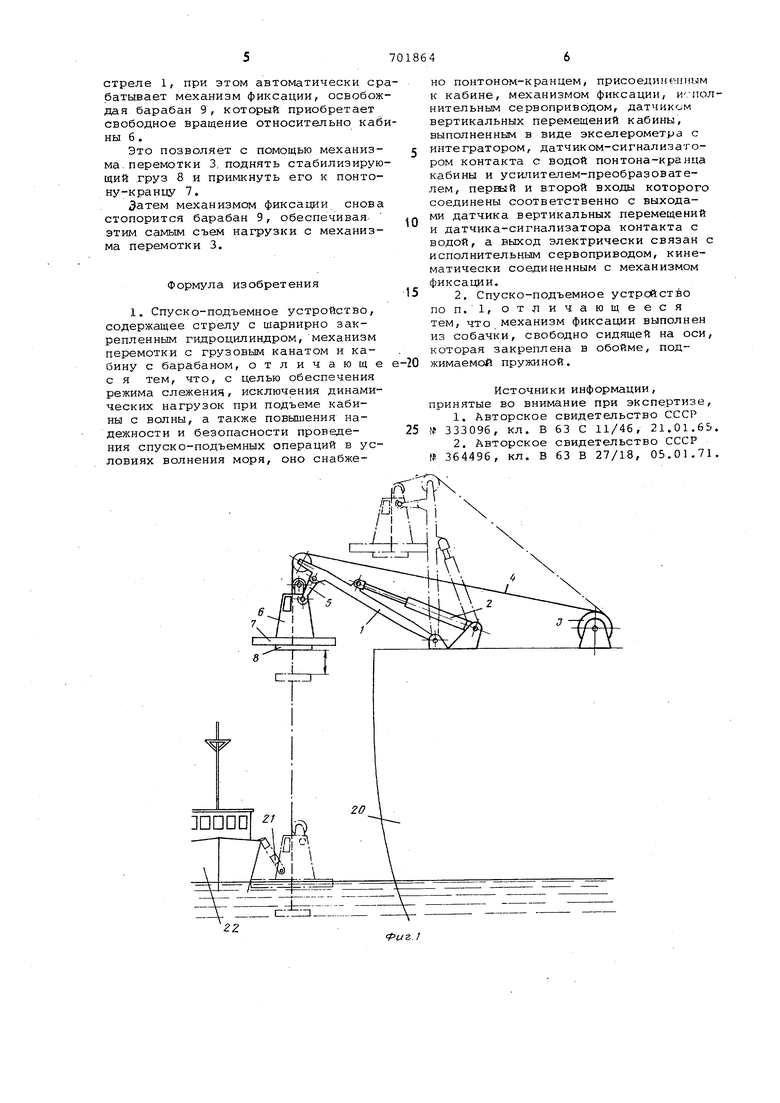
Изобретение относится к судовым палубным механизмам, а именно, к спуско-подъемнЕлм устройствам. Известно устройство для спуска и подъема водолазов, содержащее беседку с тросовой оснасткой и лебедку 1. Недостатком указанного устройства является наличие динамических нагрузок на беседку при спуске и подъеме на волнении. Наиболее близким техническим решением из известных является спуско подъемное устройство, содержащее стрелу с шарнирно-закрепленным гидроцилиндром, механизм перемотки с грузовым канатом и кабину с барабаном 2. Недостатком устройства заключается в жесткой фиксации кабины отно тально передающего судна в любой промежуток времени и связанного с этим появление динамических нагрузо при подъеме кабины, а также отсутст вие слежения кабины за перемеще ниями волн, в результате чего существенно снижается надежность и безо пасность передачи людей и грузов. Целью настоящего изобретения является обеспечение режима слежения, исключение динамических нагрузок при подъеме кабины с волны, а также повышение надежности и безопасности проведения спу.ско-подъемных операций в условиях волнения моря. Указанная цель достигается тем, что спуско-подъемное устройство снабжено понтоном-кранцем, присоединенным к кабине, механизмом фиксации, исполнительным сервоприводом, датчиком вертикальных перемещений кабины, выполненным в виде акселерометра с интегратором, датчиком-сигнализатором контакта с водой понтона-кранца кабины и усилителем-преобразователем, первый и второй входы которого соединены соответственно с выходами датчика вертикальных перемещений и датчика-сигнализатора контакта с водой, а выход электрически связан с исполнительным сервоприводом, кинематически соединенным с механизмом фиксации. Кроме того, механизм фиксации может быть выполнен из собачки, свободно сидящей на оси, которая закреплена в обойме, поджимаемой пружиной. На фиг. 1 показана схема спускоподъемного устройства; на фиг. 2 механизм фиксации с блок-схемой системы слежения, Спуако-подъемноа устройство со- . держит стрелу 1 с шарнирно закрепленным гидроцилиндром 2, механизм перемотки 3 с грузовым канатом 4, сцепной механизм 5, закрепляющий кабину 6 к стреле 1 при ее верхнем положении„ Кабина в нижней части снабжена понтоном-кранцем 7, к которому в походном положении примыкает стабилизирующий груз 8 , ; На кабине смонтирован барабан 9. Ж0СТКО насаженный на вал 10 с храпфвым колесом. 11. которое кинематически связано с механизмом фиксации,, состоящим из собачки 12, свободно С1 дящей на оси 13, которая закреплена в обойме 14, поджимаемой пружиной 15.- В свою очередь шток обойдщл 14 шарнирно соединен с исполнительним сервоприводом 16, электрически связанным с усилитепем-преобразоватфлем 17, на первый и второй входы которого включены, соответственно, датчик вертикальных перемещений 18 кабины б и датчик-сигнализатор 19 контакта с водой понтона-кранца 7, Спуско-пОдъемное устройство размещается на судне-носителе 20„ Кабина 6 посредством трапа 21 свя saiHa с принимаемым (передаваемым) судном 22. Описанное спуско-подъемное устро ство работает следующим образом, Нэ положения ПО-ПОХОДНОМУ стрела 1 с кабиной 6 и стабилизирующим зрузом вываливается гидроцилиндром 2 за борт судна-носителя 20, при этом ка бина 6 с помсйдью сцепного механизма 5 удерживается на стрелке 1 Включением исполнительного серво привода 16 храповое колесо 11 снимается с собачки, благодаря чему ба бан 9 приобретает возможность свобод ного вращения относительно кабины б Работоймеханизма перемотки 3 на травление осуществляется спуск стаб лизирующего груза 8, при этом грузо вой канат 4 перекатывается по повер: ности барабана, который в свою очередь свободно вращается под действи &л силы тяжести стабилизирующего гр 8. По достижении заданного заглубле механизм перемотки 3 о.станавливаетс и соответственно спуск стабршизирую щего груза 8 прекращается. Далее осу ществляется спуск кабиныо Для этой цели по команде собачка 12 вводится в зацепление с храповы:м колесом 11, останавливая его вращен Под действием силы веса стабилизиру щего груза 8 и силы трения между грузовым канатом 4 и поверхностью барабана 9, на котором грузовой, кан 4 уложен в несколько оборотов, просходит затяжка грузового каната 4 а барабане 9, что обеспечивает выолнение операщш спуска. Работой механизма перемотки 3 осуествляется травление грузового каата 4 и, соответственно, спуск кабины 6. По достижении понтоном-кран- цем 7 ловеркности воды датчик-сигнаизатор 19 подает управляющий сигнал контакта с водой, который формиуется в усилителе-преобразователе 17 и поступает с вьисода последнего на исполнительный сервопривод 16. Срггба,ты.ванием исполнительного серво- привода. 16 с помощью обоймы 14 собачка 12 выводится из зацепления с храповым колесом J. 1, Одновременно с этим управляющий сигна.л датчика-сигнализатора 19 блокирует сигнал поступающих от датчика вертикаль ых перемеы,ений 18, исключая его воздействие на исполнительный сервопривод 16, барабан 9 при этом приобретает возможнеэсть свободного вращения относительно кабины 6, обеспечивая режим слежения кабины за возмущенной поверхностью во..пы. По ком.а1-ще( подаваемой с суднаносителя 20 или из кабины 6, к электрической схеме механизма фиксации подключаетс.ч датчик зертккггльннх перемещений l8f обеспечивая тем самым подъем кабины с вегршины волны, что исключает динамические нагрузки в грузовом канате 4 н в ыекэ.низме перемотки 3, При нахождении кабины 6 на вершине волны датчик вертикальных, перемещений 18 подаетУправляющий сигнал соответствующей амплитуды и полярности, который --3 усилителе-преобразователе 17 формируется в выходной сигнал, воздействующий на исполнительный сервопривод 16, .В результате срабатывания испоянительндго сервопривода 16 и ввода, собачки 12 в зацепление с храповъил колесом 11 барабан 9 стопорится, препятствуя при этом за счет затяжки каната 4 спусканию кабины при уходе волны из-под понтона-кранца 7, Дал.ьнейший подъем кабины вместе со стабилизирующим грузом, из положения, опред,еленного высотой волны, осуществляется меха;-1измом перемотки 3, При подходе к понтону-кранцу 7 волны с большей амплитудой, чем предыдущая, произойдет повторное срабатывание механизма фиксации, автоматически обеспечивая этим дальнейший подъем кабины 6 на волне, С уходом волны, благодаря описанной выле системе автоматического включения механизма, фиксации, кабина 6 .зависает на-высоте равной амплитуде волнгл. При подходе кабины 6 к стреле. 1 срабатывает сцепной механизм 5 к кабине 6 фиксируется па стреле 1, при этом автоматически с батывает механизм фиксации, освобож дая барабан 9, который приобретает свободное вращение относительно ка ны б. Это позволяет с помощью механиз ма, перемотки 3. поднять стабилизирую щий груз 8 и примкнуть его к понто ну-кранцу 7. Затем механизмом фиксации снов стопорится барабан 9, обеспечивая этим самым съем нагрузки с механизма перемотки 3. Формула изобретения 1. Спуско-подъемное устройство, содержащее стрелу с шарнирно закрепленным гидроцилиндром,механизм перемотки с грузовым канатом и кабину с барабаном, отличающе с я тем, что, с целью обеспечения режима слежения, исключения динамических нагрузок при подъеме кабины с волны, а также повышения надежности и безопасности проведеНИН спуско-подъемных операций в условиях волнения моря, оно снабжеФиг.1 но понтоном-кранцем, присоединенным к кабине, механизмом фиксации, и/лолнительным сервоприводом, датчиком вертикальных перемещений кабины, выполненным в виде экселерометра с интегратором, датчиком-сигнализатором контакта с водой понтона-кранца кабины и усилителем-преобразователем, первый и второй входы которого соединены соответственно с выходами датчика вертикальных перемещений и датчика-сигнализатора контакта с водой, а выход электрически связан с исполнительным сервоприводом, кинематически соединенным с механизмом фиксации. 2. Спуско-подъемное устройство ПОП.1, отличающееся тем, что механизм фиксации выполнен из собачки, свободно сидящей на оси, которая закреплена в обойме, поджимаемой пружиной. Источники информации, принятые во внимание при экспертизе, 1.Авторское свидетельство СССР № 333096, кл. В 63 С 11/46, 21.01.65. 2,Авторское свидетельство СССР № 364496, кл. В 63 В 27/18, 05.01.71.
16
fuz.Z
