I
Изобретение относится к оборудованию складов и может быть использовано в различных отраслях промышленности.
Известны склады для хранения штучных грузов, содержащее стеллажи, установленные с проходами для размещения в них крана-штабелера пйсредством механизма для передачи крана-штабелера из прохода в проход, тележку с электрокабелем питания крана-штабелера и стыковочное устройство механизма передачи кранаштабелера с каждым проходом С
Недостатком этого склада является невозможность работы с пе|)едаточиым механизмом нескольких крановштабелеров.
Известен автоматизированный склад для хранения штучных грузов, содержащий стеллажи, по гсиайней мере, в одном из проходос: между которыми установлен кран-ат 5белер, механизм для передачи кргна-штабелера из одного прохода в другой, тележки с электрокабелем для питания кранаштабелера и стыковочное устройство, включающее в себя часть электрического разъема, расположенную в кор- пусе подвижно закрепленную посредством винтовой пары на кране-штабелере и взаимодействующую с другой частью электрического разьема, жестко закрепленной на каждой тележ .
Недостатком является недостаточная надежность стыковки крана-штабелера с соответствующей тележкой с эяектрокабелем, что приводит к ходу из строя всего склада.
Цель изобретения - повышение надежности работы.
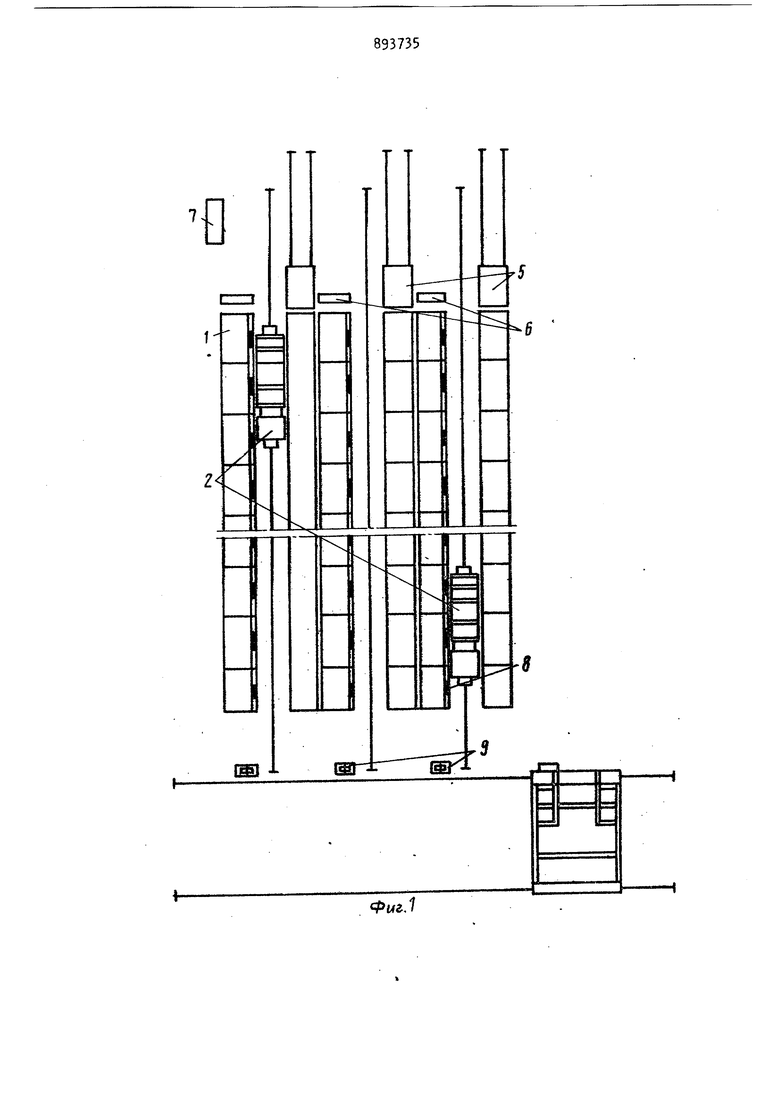
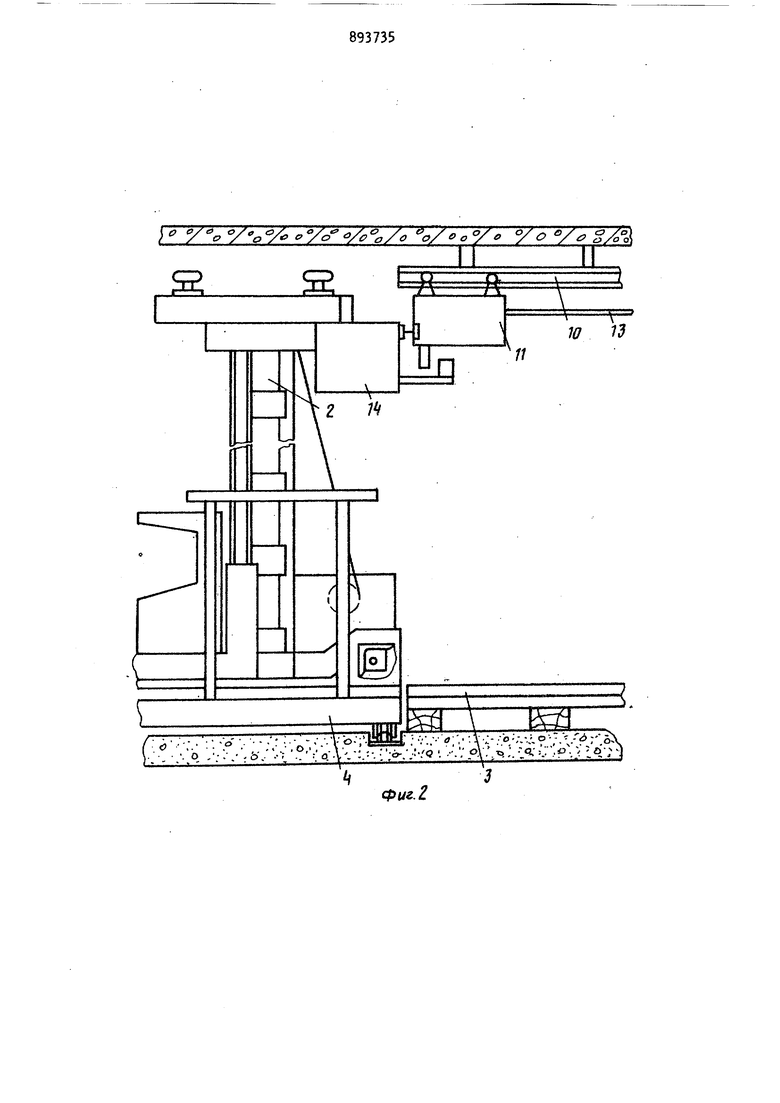
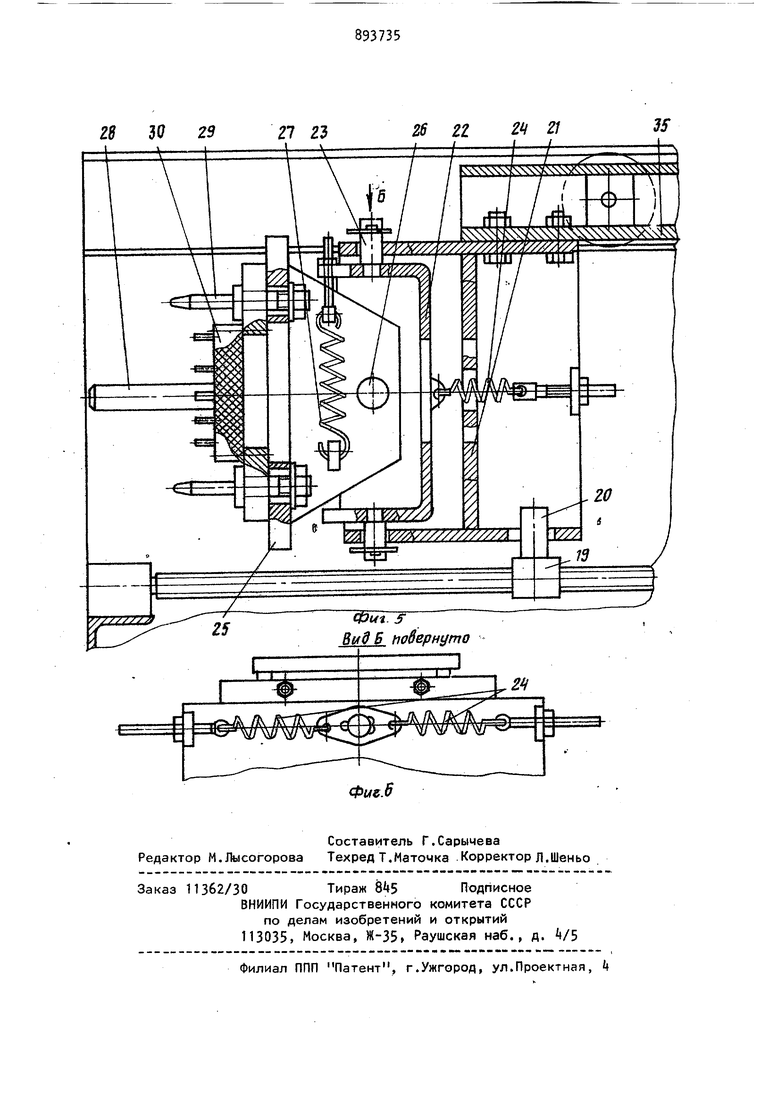
Указанная цель достигаетсв тем, что в устройстве .каждая тележка снаб20жена пальцем, а стыковочное, устройство - подвижным захватом с клиновыми элементами, взэимодействущим с пальцем соответствующей тележки, при этом закрепленная на кране-штабелере часть электрического разъема подпружинена в вертикальной и горизонтальной плоскостях и снабжена штырями для предварительного и окон чательного соединения ее с другой частью. Стыковочное устройство при этом содержит подвижную и внутреннюю обоймы, подвижно связанные между собой вертикальными ползунами, и прикрепленный посредством горизонтальной оси к упомянутому корпусу балансир, верхний конец которого связан с установленным в смонтирова ных на корпусе направляющих ползуно х естко прикрепленным к наружной обо ме, которая связана с гайкой упомянутой винтовой пары посредством пал ца , при этом внутренняя обойма подпружинена в горизонтальной плоскости и в ней закреплена часть электри ческого разъема, расположенная на кране-штабелере. На фиг. 1 изображен автоматизиро . ванный склад штучных грузов, общий вид; на фиг, 2 - стеллажный кранштабелер; на фиг. 3 - дополнительное стыковочное устройство во взаимодействии с тележкой на фиг. разрез А-А на фиг. 3, на фиг. .95 дополнительное стыковочное устройст во, разрез - , на фиг. 6 - вид Б на фиг. 5Автоматизированный склад для хра нения штучных грузов содержит распо ложенные с несколькими проходами йте лажи 1, установленные в проходах краны-штабелеры 2, опирающиеся на напольный рельс 3, механизм 4 для передачи кранов-штабелеров из проход в проход, загрузочно-разгрузочные посты 5 и 6 кранов-штабелеров 2 пуль ты 7 автоматического управления кра ном-штабелером и пульт автоматическо го управления механизмом k. Для авт матической остановки крана-штабелера 2 у заданной ячейки стеллажей слу жат датчики 8 точной остановки каждо го крана-штабелера 2 в виде секционированных троллеев, закрепленные в верхней части стеллажей 1. Для автоматической остановки механизма Ц служат датчики 9 установленные у каждого межстеллажного прох ди. В верхней части стеллажей (фиг. 2 закреплены стационарые направляющие ча которых смонтированы тележки 11 54 с частью 12 электрического разъема и электрокабелем 13 для питания кранаштабелера. На раме крана-штабелера 2 установлено стыковочное устройство 14. Стыковочное устройство 14, закрепленное на мачте крана-штабелера 2, состоит из корпуса 15, в котором закреплен его привод, состоящий из электродвигателя 16, открытой зубчатой передачи 17 винта 18, по которому перемещается гайка 19Гайка 19 с помощью пальца 20 связана с наружной обоймой 21, внутри которой закреплена внутренняя обой ма 22. Крепление внутренней обоймы 22 в наружной обойме 21 производится с помощью двух полуосей 23 и пружины 24. Плата 25-закреплена во внутренней обойме 22 с помощью оси 2б и пружины 27. Плата 25 несет длинные штыри 28 предварительного соединения и коротмие штыри 29 окончательного соединения с тележками 11, снабженными частями 12 электрического разъема и установленными в каждом проходе. В плате 25 жестко закреплена ответ ная часть 30 электрического разъема. В корпусе 15 стыковочного устройства 14 закреплены нижня 31 и верхняя 32 направляющие. В корпусе 15 установлен балансир 33 закрепленный на оси 34, крепящейся к корпусу 13Наружняя обойма 21 связана ci ползуном 35, перемещающимся в верхних направляющих 32. С ползуном 35 подвижно связан верхний конец балансира 33. Нижний конец балансира 33 подвижно связан с захватом 36, взаимодействующим с пальцами 37, закрепленными на тележках 11, посредством клиновых элементов 38. Автоматизированный склад штучных грузов работает следующим образом. При загрузке склада грузовой пакет устанавливается аккумуляторным погрузчиком (не показан)на один из загрузочно-разгрузочных постов 5 крана-штабелера 2. В случае наличия крана-штабелера 2 у данного загрузочно-разгрузочного поста 5, оператор с пульта 7 управления краном-штабелером 2 адресует последний в заданную ячейку стеллажей. 5 , Кран-штаЬелер с помощью выдвижного вилочного захвата (не показан) снимает грузовой пакет с загрузочиоразгрузочного поста 5 и транспортирует его по проходу до заданной яче ки стеллажей 1. У заданной ячейки стеллажей-кран-штабелер с помощью датчиков 8 автоматически останавливается. С помощью выдвижного вилочного захвата кран-штабелер укладывает грузовой паркет в заданную ячей ку стеллажей, после чего он возвращается в исходное положение у загру зочно-разгрузочного поста S- В случае отсутствия крана-штабелера в нужном проходе оператор с пульта 7 управления механизмом k переводит упомянутый механизм к проходу, где находится в время кран-штабелер Механизм i с помощью одного из датчи ков 9 точно останавливается у задан ного прохода и включает свое стыко(Вочное устройство (не показано). Стыковочное устройство Н, закрепленное в верхней части работает следующим образом. После установки крана-штабелера механизмом k перед заданным проходом включается упомянутое устройство Н. При этом плата 25 с частью 30 электрического разъема, закрепленна во внутренней 22 и наружной 21 обой мах , начинает двигаться с помощью винтовой платы, внутри корпуса 15 в направлении тележки 11, содержаще ответную часть 12 электрического разъема и подвешенную к стационарны направляющим 10. К тележке 11 прикреплен гибкий кабель 13 питающий кран-штабелер а каждом проходе. Движение наружной обоймы 21 проис ходит с помощью ползуна 35 по верхним направляющим 32, заключенным в корпусе 15.
Вместе с ползуном 35 перемещается верхний конец балансира 33 в средней части закрепленного на оси 3 при этом нижний конец балансира 33 перемещается в противоположную сторону и вместе с ним передвигается захват 3, подвижно установленный в нижних направляющих 31, закрепленных в корпусе 15
Захват 3 передвигаясь, захватывает палец 36I установленный на тележке 11 с электрокабелем 13.
Применение автоматизированного склада штучных грузов снижает себе50стоимость переработки грузов, улучшает использование емкости складского помещения.
Годовой экономический эффект от применения одного автоматизирован$Sного склада составляет 20, тыс. руб.
Колж ество изготовляемых заводами Миилегпищемаша автоматизирован5Закрепленная во внутренней обойме 22 плата 25 с частью 30 электрического разъема при подходе к ответной части 12 электрического разъема тележки 11 касается ее вначале штырем 28 предварительного соединения и штырем 29 окончательного соединения. При этом часть 30 электрического разъема стыковочного устройства 1 крана-штабелера 2 входит в ответную часть 12 разъема тележки 11. Кран-штабелер 2 на малой скорости съезжает с механизма Ц и выезжает в проход. При выезде крана-штабелера из прохода он выезжает на механизм k, После этого включается в работу стыковочное устройство , при этом происходит расстыковка электрических разъемов штабелера 2 и тележки 11 с электрокабелем 13. Механизм k вместе с краном-штабелером 2 перемещается к заданному проходу, где с помощью одного из датчиков 9 точно устанавливается у заданного прохода и включает свое стыковочное устройство (не показано). С помощью стыковочного устройства 14 крана-штабепера 2 происходит стыковка электр шеских разъемов штабелера и тележки 11. Одновременно с помощь, клинового захвата 36 и происходит механическое соединение крана-штабелера и тележки. После подачи электропитания на кран-штабелер 2 он съезжает с передаточного механизма k и передвигается е исходное положение у загрузочно-разгрузочного поста 5 после чего он работает в автоматическом цикле загрузки и разгрузки. Передаточный механизм перемещается к следующему крану-штабелеРУ 2.
ных складов составит к 19Ь5 г 100 шт в год.
Формула изобретения
1. Автоматизированный склад для хранения штучных грузов, содержащий стеллажи, по крайней мере, в одном из проходов между которыми установлен кран-штабелер, механизм для передачи крана-штабелера из одного прохода в другой, тележки с электрокабелем для питания крана-штабелера и стыковочное устройство, включающее в себя часть электржеского разъема, расположенную в корпусе, подвижно закрепленную посредством винтовой пары на кране-штабелере и взаимодействующую с другой частью электрического разъема, жестко закрепленной на каждой тележке, о т л и ч а ющ и и с я тем, что, с целью повышения надежности работы, каждая тележка снабжена пальцем, а стыковочное устройство - подвижным захватом с клиновыми элементами, взаимодействующим с: пальцем соответствующей тележкр, Нри этом закрепленная на кране-штабелере часть электриче.ского
разъема подпружинена в вертикальной и горизонтальной плоскостях и снабжена штырями для предварительного и окончательного соединения ее с другой
.частью. .
2. Склад поп, 1,отличающ и и с я тем, что стыковочное устройство содержит наружную и внутреннюю обоймы, подвижно связанные между
собой вертикальными ползунами, и прикрепленный посредством горизонтапьной оси к упомянутому корпусу балансир, верхний конец которого связан с установленным в смонтированных на
корпусе направлящих ползуном, жестко прикрепленным к наружной обойме, которая связана с гайкой упомянутой винтовой пары посредством палы , при этом внутренняя обойма подпружинена
в горизонтальной плоскости и в ней закреплена часть электрического разъема, расположенная на кранештабелере.
Источники информации,
принятые во внимание при экспертизе
1.Авторское свидетельство СССР № 553704, кл. В 66 С 13/12, 197.
2.Авторское свидетельство СССР по заявке № 2155575/27-11,
кл. В 65 G 1/02, 1976 (пр тотип).
(--:
Фиг. 2
П
Jj
Я JS Фиг.З ffl

| название | год | авторы | номер документа |
|---|---|---|---|
| Склад штучных грузов | 1975 |
|
SU818968A1 |
| Механизированный склад для хранения штучных грузов | 1976 |
|
SU676503A1 |
| СКЛАД ДЛЯ ШТУЧНЫХ ГРУЗОВ | 1973 |
|
SU375227A1 |
| Склад для хранения шин | 1986 |
|
SU1404419A1 |
| Автоматизированный склад для хранения штучных грузов | 1983 |
|
SU1152890A1 |
| Механизированный склад для хранения штучных грузов | 1989 |
|
SU1622239A1 |
| ПОДЪЕМНО-ТРАНСПОРТНОЕ УСТРОЙСТВО ДЛЯ ОБСЛУЖИВАНИЯ СТЕЛЛАЖЕЙ | 1990 |
|
RU2017676C1 |
| Склад для хранения штучных грузов | 1977 |
|
SU650894A1 |
| Склад для хранения штучных грузов | 1989 |
|
SU1729958A1 |
| КРАН-ШТАБЕЛЕР,Ф011ДЗ.;:.о^йа| | 1973 |
|
SU390002A1 |

58
