равляющая для ориентации захвата кран штабелера.
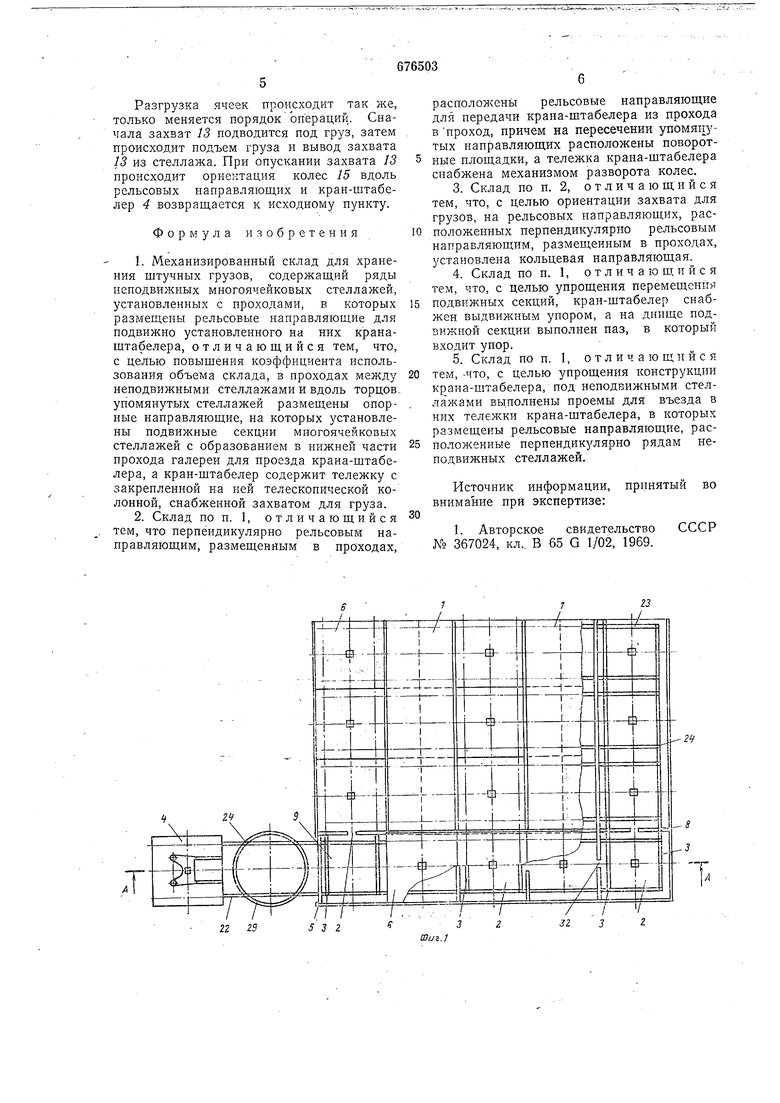
Механизированный склад содержит ряды неподвижных стеллажей 1, установленных с нроходом 2, в котором размещены рельсовые направляющие 3 для кранаштабелера 4. Между рядами неподвижных стеллажей / в проходах 2 размещены опорные направляющие 5, на которых установлены подвижные секции 6 стеллажей с образованием в нижней части прохода галереи 7 для проезда крана-штабелера 4.
Подвижные секции 6 стеллажей размещены также на опорных направляющих 8 вдоль торцов неподвижных стеллажей 1 с образованием свободной зоны 9 для размещения в ней одной подвижной секции 6 при перемещении упомянутых Секций. Стороны обслуживания секций 6 обращены друг к другу, а днище каждой секции 6 снабжено пазом 10.
Кран-штабелер 4 содержит тележку 11, на которой установлена телескопическая колонна 12 с захватом 13, и выдвижной упор 14, взаимодействующий с пазом 10 секций 6. На тележке 11 смонтированы колеса 15, снабженные моторами-редукторами 16 и механизмом их разворота с приводом 17. Колонна 12 содержит выдвижные цилиндры 18 и выдвижные поддерживающие цилиндры 19, связанные с приводом 20 подъема.
Неподвижные стеллажи снабжены в нижней части проемами 21 для въезда тележки 11.
Перпендикулярно рельсовым направляющим 3, размещенным в нроходах 2, расположены рельсовые направляющие 22, размещенные вдоль торцов стеллажей /, и рельсовые направляющие 23, размещенные в проемах 21 стеллажей 1. На каждом пересечении рельсовых нанравляющих 3, 22 и 23 установлена поворотная площадка 24, а участки пересечения рельсовых направляющих выполнены со скосами 25 и назами 26.
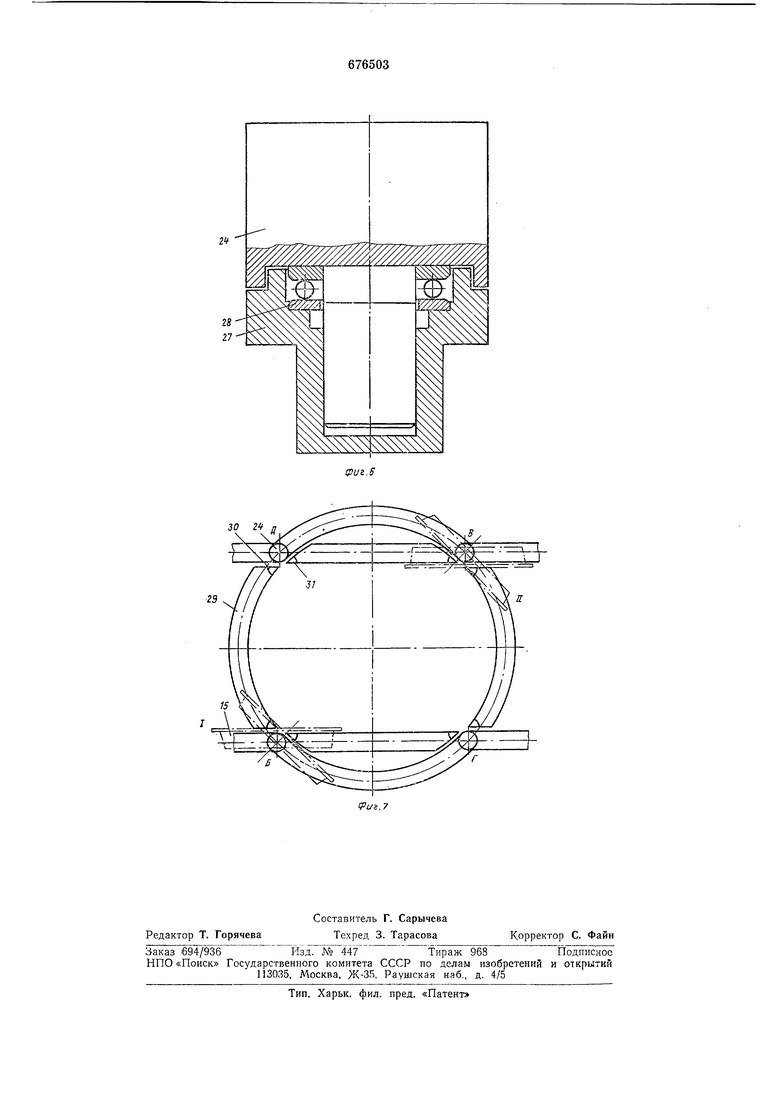
Поворотная площадка 24 насажена на основание 27 с помощью упорного подшипника 28.
На рельсовых нанравляющих 22 в пункте загрузки-выгрузки расположена направляющая 29 для разворота крана-штабелера 4 при ориентации его захвата 13.
В местах пересечения кольцевой нацравляющей 29 и рельсовых направляющих 22 установлены поворотные площадки 24, а участки пересечения снабжены пазами 30 и скосами 31.
Опорные направляющие 5 и 5 снабжены пазами 32 для прохода упора 14 при перемещении подвижных секций 6.
Работает склад следующим образом. В исходном положении (фиг. 1 и 2)
кран-щтабелер 4 находится в пункте загрузки-выгрузки над кольцевой направляющей 29, а свободной является зона 9, первая по ходу крана-щтабелера 4. По 5 команде оператора колеса 15 приводом 17 поворачиваются на 45° (на кольцевую направляющую 29) до совпадения осей диагонально расположенных пар колес 15 (фиг. 7, положения I и II), что фиксируется датчиками положения.
В процессе поворота и после завершения его реборда колеса 15 остается с внутренней стороны направляющих, что обеспечивает устойчивость крана-штабелера 4. 15 После установки колес в новое рабочее положение привод 17 отключается и включаются моторы-редукторы 16 на вращение в разные стороны, ориентируя захват 13 перпендикулярно стороне обслуживания
20 заданного стеллажа. При этом колесная пара перемещается из точек Б и S в точки Г и Д до совпадения вертикальных осей колес 15 с вертикальными осями других поворотных площадок 24, привод 17 отключается, ориентируя ходовые колеса вдоль направляющих 22. После этого кран-штабелер 4 перемещается к заданному проходу 2. Затем выдвигается упор 14, который входит в паз 10 подвижных сек0 цнй 6, и кран-щтабелер 4 перемещает ряд секций 6 в сторону свободной зоны 9, освобождая зону перед заданным проходом 2. После сдвига секций 6 на один щаг упор 14 выходит из паза 10, а кран-щтабе5 лер 4 возвращается к заданному проходу и ориентирует колеса 15 вдоль рельсовых направляющих 3. В проходе 2 кран-штабелер 4 освобождает зону перед заданной ячейкой стеллажа / аналогичным способом. Затем возвращается к заданной ячейке, ориентирует колеса 15 вдоль направляющих 23 и поднимает захват 13 на нужную вь1соту. Тележка 11 въезжает в проем и захват 13 оставляет груз в ячейке стел5 лажа. Тележка // выезжает из проема, ориентируются колеса 15 вдоль направляющих 3 и кран-штабелер возвращается в исходное положение в пункт загрузкивыгрузки. Загрузка подвижных секций 6
происходит аналогично при ориентации захвата 13 перпендикулярно стороне обслуживания этих секций и при образовании свободной зоны перед заданной ячейкой.
5 Ориентация колес вдоль рельсовых направляющих 3 W 23 осуществляется следующим образом.
Привод 17 новорачивает каждое колесо /5 на 90° таким образом, что в процессе поворота одна диагональная пара колес вращается по часовой стрелке, а другая- против часовой стрелки, поэтому реборды колес 15 остаются с внутренней стороны рельсовых направляющих (положения I и
III на фиг. 5).
Разгрузка ячеек происходит так же, только меняется порядок операции. Сначала захват 13 подводится иод груз, затем происходит подъем груза и вывод захвата 13 из стеллажа. При опускании захвата 13 происходит ориентация колес 15 вдоль рельсовых направляющих и кран-штабелер 4 возвращается к исходному пункту.
Формула изобретения
1.Механизированный склад для хранения штучных грузов, содержащий ряды неподвижных многоячейковых стеллажей, установленных с проходами, в которых разглещены рельсовые направляющие для подвижно установленного на них кранаштабелера, отличающийся тем, что,
с целью повышения коэффициента использования объема склада, в проходах между неподвижными стеллажами и вдоль торцов упомянутых стеллажей размещены опорные направляющие, на которых установлены подвижные секции миогоячейковых стеллажей с образованием в нижней части прохода галереи для проезда крана-штабелера, а кран-штабелер содержит тележку с закрепленной на ней телескопической колонной, снабженной захватом для груза.
2.Склад иоп. 1, отличающийся тем, что перпендикулярно рельсовым направляющим, размещенным в проходах.
расположены рельсовые направляющие для передачи крана-штабелера из прохода в проход, причем на пересечении упомянутых направляющих расположены поворотные площадки, а тележка крана-штабелера снабжена механизмом разворота колес.
3.Склад по п. 2, отличающийся тем, что, с целью ориентации захвата для грузов, на рельсовых направляющих, расположенных перпендикулярно рельсовым направляющим, размещенным в проходах, установлена кольцевая направляющая.
4.Склад по п. 1, о т л и ч а ю ш, и и с я тем, что, с целью упрощения перемещения подвижных секций, кран-штабелер снабжен выдвижным упором, а на днище подвижной секции выполнен паз, в который входит упор.
5.Склад по п. 1, отличающийся тем, -что, с целью упрощения конструкции краиа-штабелера, под неподвижными стеллажами выполнены проемы для въезда в них тележки крана-штабелера, в которых размещены рельсовые направляющие, расположенные перпендикулярно рядам неподвижных стеллажей.
Источник информации, принятый во внимание при экспертизе:
СССР
1. Авторское свидетельство № 367024, кл.. В 65 G 1/02, 1969.

| название | год | авторы | номер документа |
|---|---|---|---|
| Склад штучных грузов | 1975 |
|
SU818968A1 |
| КРАН-ШТАБЕЛЕР,Ф011ДЗ.;:.о^йа| | 1973 |
|
SU390002A1 |
| Автоматизированный склад для хранения пакетированных грузов | 1973 |
|
SU591360A1 |
| Автоматизированный склад для хранения штучных грузов | 1983 |
|
SU1152890A1 |
| Автоматизированный склад | 1980 |
|
SU992344A1 |
| СКЛАД ДЛЯ ШТУЧНЫХ ГРУЗОВ | 1973 |
|
SU375227A1 |
| Устройство для ориентации платформы стеллажного крана-штабелера | 1982 |
|
SU1071535A1 |
| УСТРОЙСТВО для ПЕРЕГРУЗКИ поддонов с ГРУЗАМИ С РОЛЬГАНГА НА ГРУЗОПОДЪЕМНИК КРАНА-ШТАБЕЛЕРА | 1973 |
|
SU390004A1 |
| БИБЛИОТЕКА | | 1971 |
|
SU302308A1 |
| Грузоподъемная площадка крана-штабелера | 1985 |
|
SU1283199A1 |


А.
jrL
/
/ 7 7
27
13
(риг.З
}5
г
28п30 2t п
2Э
