Изобретение относится к складскому оборудованию шинных, автотракторных и машиностроительных заводов.
Цель изобретения - упрошение конструкции и повышение коэффициента исполь- зования объема.
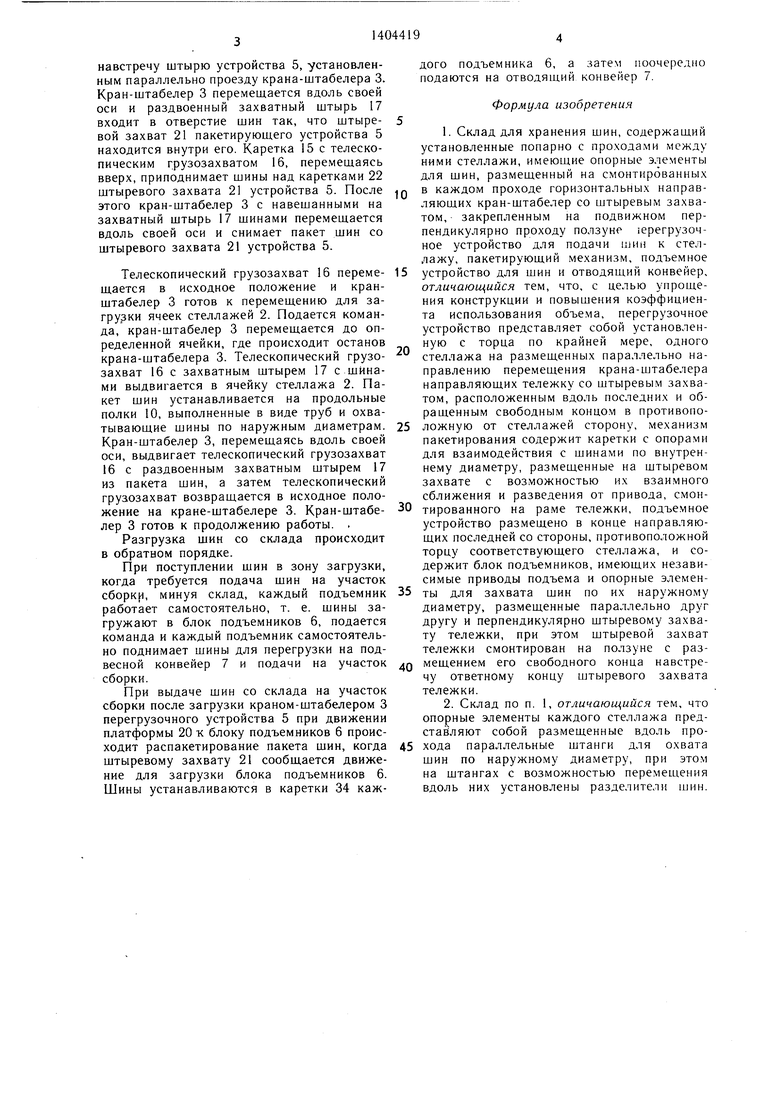
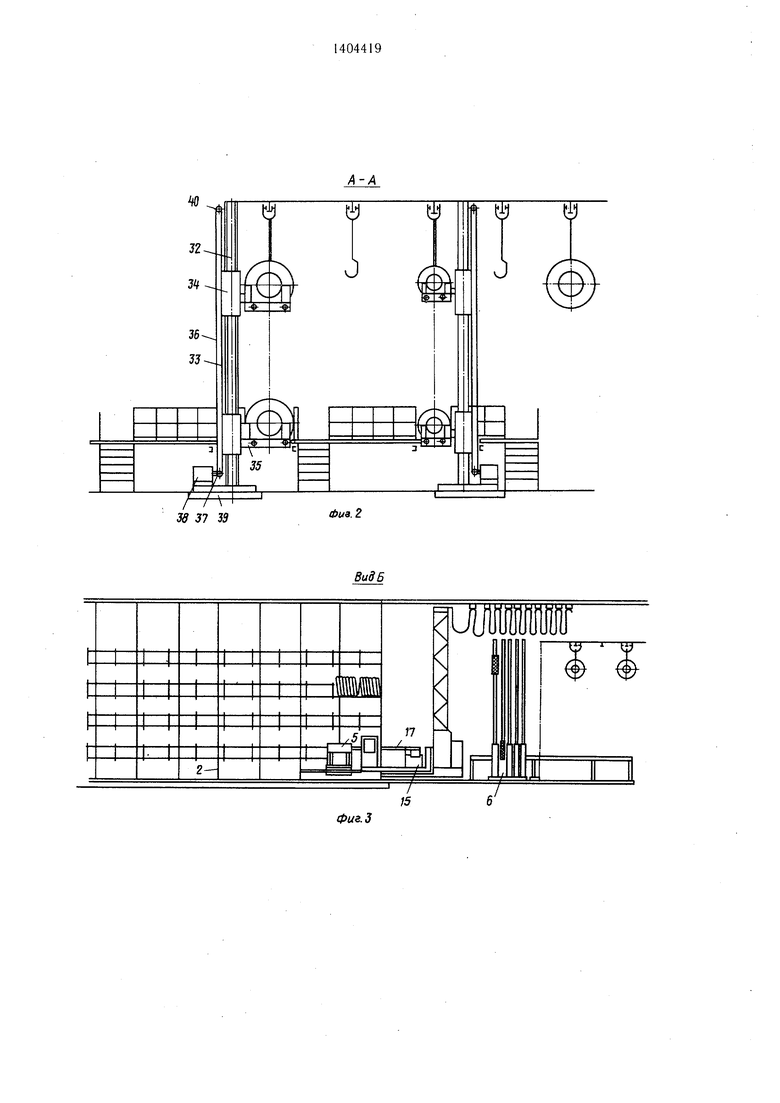
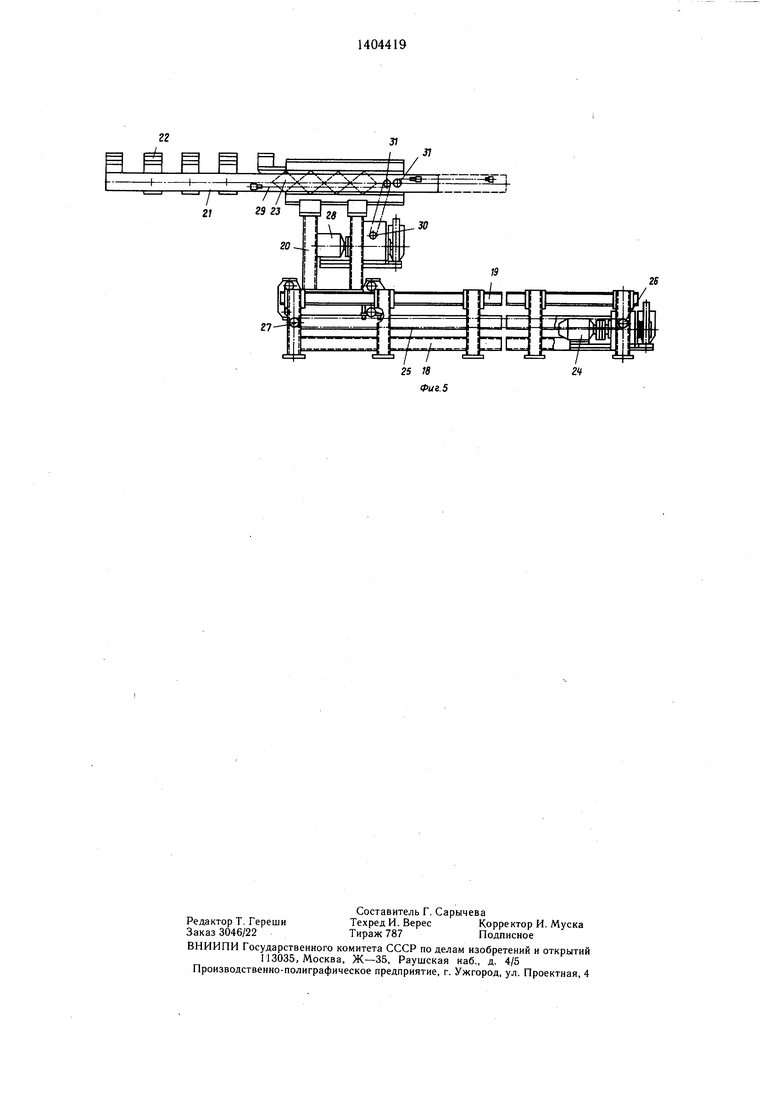
На фиг. 1 изображен склад, обш,ий вид; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - вид Б на фиг. 1; на фиг. 4 - разрез В-В на фиг. 1; на фиг. 5 - перегрузочное устройство, обш,ий вид.
Склад шин состоит из зоны 1 хранения, включаюш,ей блок стеллажей 2 с проездами для кранов-штабелеров 3, и зоны 4 приема- выдачи, включаюш,ей передвижные перегрузочные устройства 5 с пакетирующим ме- ханизмом, блок подъемников 6 и отводящие конвейеры 7.
Блок стеллажей 2 содержит вертикальные стойки 8 с неподвижно закрепленными горизонтальными направляющими 9, к которым консольно прикреплены продольные полки 10, выполненные в виде труб, охватывающих шины по наружным диаметрам, с регулируемыми разделителями 11 пакетов шин. С помощью разделителей 11 можно регулировать длину ячейки блока стеллажа в зависимости от типоразмера складируемых шин. В проездах размещены верхний опорный 12 и нижний ходовой 13 рельсы для перемещения крана-штабелера 3.
Кран-штабелер 3 состоит из вертикальной стойки 14 с перемещающейся по ней ка- реткой 15 с телескопическим грузозахва- том 16, выполненным с тремя выдвижными элементами. На верхнем выдвижном элементе неподвижно закреплен раздвоенный захватный штырь 17, расположенный параллельно продольному проезду крана-штабе- лера 3. Раздвоенный захватный штырь 17 базирует шины в пакете и не дает им раскачиваться в процессе работы.
Перегрузочное устройство 5 состоит из неподвижной рамы 18 с жестко закрепленными на ней направляющими 19 для пере- мещения тележки с платформой 20 с выдвижным штыревым захватом 21, на котором установлены каретки 22 пакетирующего механизма, приводимые в движение от привода 23 типа «нюрнбергских ножниц, вы- полненного в виде рычажной системы, связанной с пакетирующими каретками 22. Привод 24 перемещения платформы 20 жестко закреплен на неподвижной раме 18 и передает перемещение платформе 20 посредством цепи 25, состоящей из двух вет- вей, расположенных параллельно и охватывающих приводные звездочки 26, сидящие на выходных валах привода 24, и жестко закрепленных на раме 18 звездочек 27. Каждая ветвь цепи 25 свободными концами закреплена на платформе 20. Привод 28 выдвижения штыревого захвата 21 жестко закреплен на платформе 20 и передает движение при помощи двух ветвей цепи 29,
охватывающих приводные звездочки 30 и звездочки 31, сидящие на валах, закрепленных на штыревом захвате 21. Каждая ветвь цепи 29 свободными концами закреплена на штыревом захвате 21.
Блок подъемников 6 состоит из независимых подъемников по числу шин в пакете. Подъемник 6 состоит из неподвижной рамы 32 с жестко закрепленными на ней вертикальными направляющими 33, по которым перемещается каретка 34 с механизмом центрирования и зажима шин 35.
Вертикальное перемещение каретки происходит при помощи цепной передачи, состоящей из цепи 36, охватывающей приводную звездочку 37, сидящую на валу привода 38, установленного на неподвижной раме 39, и звездочку 40, закрепленную на неподвижной раме 32 подъемника.
Склад используется следующим образом.
При поступлении щин в зону 4 приема- выдачи загружается блок подъемников 6. После того, как произойдет загрузка блока подъемников 6 и шины будут сцентрированы, включаются приводы 38 подъемников и щины, установленные на каретках 34, поднимаются на уровень, необходимый для входа штыревого захвата 21 перегрузочного устройства 5 в центральные отверстия шин. Включается привод 24 передвижения платформы 20 и платформа 20 перемещается к блоку подъемников 6. При подходе платформы 20 к блоку подъемников 6 подается команда на включение- (не показано) привода 28 выдвижения щтыревого захвата 21.
Штыревой захват 21 входит в отверстия щин, пакетирующие каретки 22 раздвигаются с таким расчетом, чтобы каждая шина с подъемника 6 установилась на пакетирующую каретку 22. Снова включаются приводы 38 блока подъемников 6 и каретки 34 опускаются в положение, когда шины ложатся на каретки 22 щтыревого захвата 21, а каретки 34 подъемников 6 опускаются ниже наружного диаметра щин и позволяют штыревому захвату 21 перегрузочного устройства с навещанными на его каретки 22 шинами проходить над каретками 34 блока подъемников 6. Штыревой захват 21 с шинами возвращается в исходное положение.
При обратном ходе штыревого захвата 21 включается привод 23 сближения пакетирующих кареток 22. Каретки 22 сближаются, шины поджимаются и образуется пакет, готовый к перемещению на позицию загрузки. Подается команда и платформа 20 с пакетом щин перемещается на позицию загрузки.
Подается команда и кран-штабелер 3 подходит к позиции загрузки. Выдвигается телескопический грузозахват 16 с раздвоенным захватным штырем 17, обращенным
навстречу штырю устройства 5, установленным параллельно проезду крана-штабелера 3. Кран-штабелер 3 перемещается вдоль своей оси и раздвоенный захватный штырь 17 входит в отверстие шин так, что штыревой захват 21 пакетирующего устройства 5 находится внутри его. Каретка 15 с телескопическим грузозахватом 16, перемещаясь вверх, приподнимает шины над каретками 22 штыревого захвата 21 устройства 5. После этого кран-штабелер 3 с навешанными на захватный штырь 17 шинами перемещается вдоль своей оси и снимает пакет шин со штыревого захвата 21 устройства 5.
Телескопический грузозахват 16 перемещается в исходное положение и кран- штабелер 3 готов к перемещению для загрузки ячеек стеллажей 2. Подается команда, кран-штабелер 3 перемещается до определенной ячейки, где происходит останов крана-штабелера 3. Телескопический грузозахват 16 с захватным штырем 17 с шинами выдвигается в ячейку стеллажа 2. Пакет шин устанавливается на продольные полки 10, выполненные в виде труб и охватывающие шины по наружным диаметрам. Кран-штабелер 3, перемещаясь вдоль своей оси, выдвигает телескопический грузозахват 16 с раздвоенным захватным щтырем 17 из пакета шин, а затем телескопический грузозахват возвращается в исходное положение на кране-щтабелере 3. Кран-щтабе- лер 3 готов к продолжению работы. ,
Разгрузка щин со склада происходит в обратном порядке.
При поступлении шин в зону загрузки, когда требуется подача щин на участок сборки, минуя склад, каждый подъемник работает самостоятельно, т. е. шины загружают в блок подъемников 6, подается команда и каждый подъемник самостоятельно поднимает шины для перегрузки на подвесной конвейер 7 и подачи на участок сборки.
При выдаче шин со склада на участок сборки после загрузки краном-штабелером 3 перегрузочного устройства 5 при движении платформы 20 к блоку подъемников 6 происходит распакетирование пакета шин, когда щтыревому захвату 21 сообщается движение для загрузки блока подъемников 6. Шины устанавливаются в каретки 34 каж0
дого подъемника 6, а затем поочередно подаются на отводящий конвейер 7.
Формула изобретения
1.Склад для хранения шин, содержащий установленные попарно с проходами между ними стеллажи, имеющие опорные элементы для шин, размещенный на смонтированных
Q в каждом проходе горизонтальных направляющих кран-штабелер со штыревым захватом, закрепленным на подвижном перпендикулярно проходу ползуне ерегрузоч- ное устройство для подачи шин к стеллажу, пакетирующий механизм, подъемное
5 устройство для шин и отводящий конвейер, отличающийся тем, что, с целью упрощения конструкции и повыщения коэффициента использования объема, перегрузочное устройство представляет собой установленную с торца по крайней мере, одного стеллажа на размещенных параллельно направлению перемещения крана-штабелера направляющих тележку со штыревым захватом, расположенным вдоль последних и обращенным свободным концом в противопо5 ложную от стеллажей сторону, механизм пакетирования содержит каретки с опорами для взаимодействия с щинами по внутреннему диаметру, размещенные на штыревом захвате с возможностью их взаимного сближения и разведения от привода, смон0 тированного на раме тележки, подъемное устройство размещено в конце направляющих последней со стороны, противоположной торцу соответствующего стеллажа, и содержит блок подъемников, имеющих независимые приводы подъема и опорные элемен5 ты для захвата щин по их наружному диаметру, размещенные параллельно друг другу и перпендикулярно штыревому захвату тележки, при этом штыревой захват тележки смонтирован на ползуне с разQ мещением его свободного конца навстречу ответному концу штыревого захвата тележки.
2.Склад по п. 1, отличающийся тем, что опорные элементы каждого стеллажа пред- став ляют собой размещенные вдоль про5 хода параллельные штанги для охвата шин по наружному диаметру, при этом на штангах с возможностью перемещения вдоль них установлены разделители шин.
I
w
J
ж
ж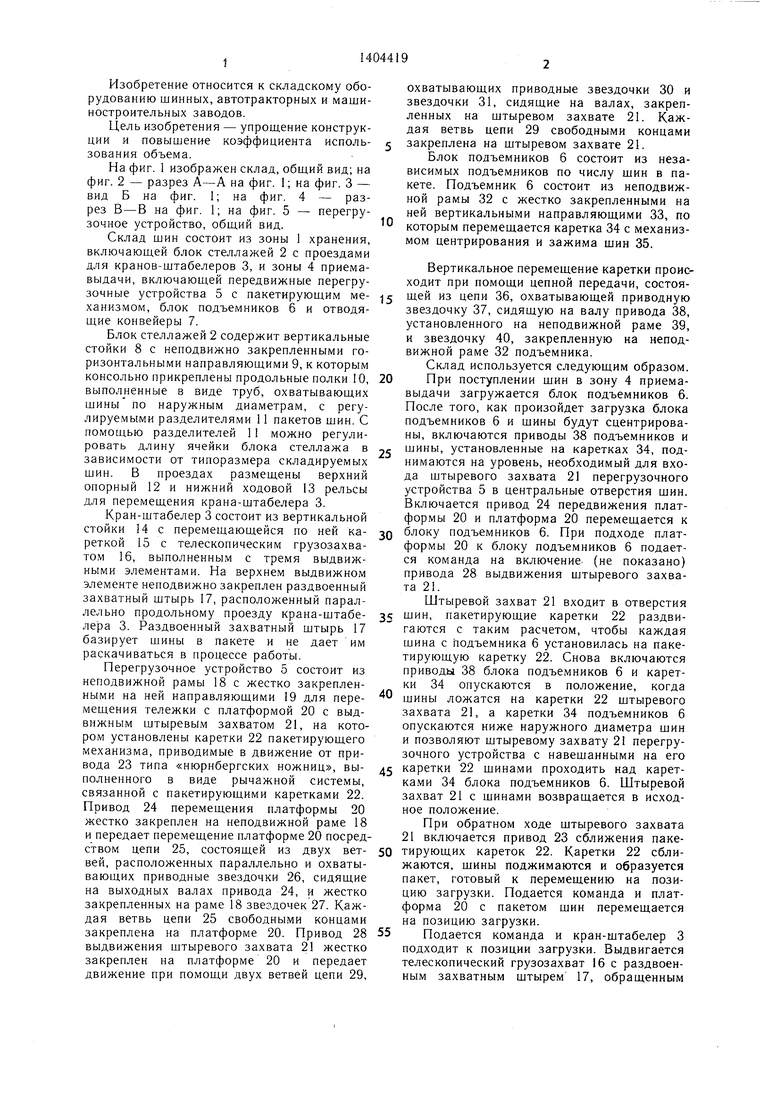
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЗИРОВАННАЯ ТРАНСПОРТНО-СКЛАДСКАЯ СИСТЕМА ДЛЯ КОЛЕСНЫХ ШИН | 1990 |
|
RU2013327C1 |
| Автоматизированная транспортно-накопительная система | 1985 |
|
SU1306690A1 |
| Автоматизированный склад для хранения штучных грузов | 1983 |
|
SU1152890A1 |
| Склад для хранения длинномеров | 1989 |
|
SU1698149A1 |
| Стеллажный кран-штабелер | 1988 |
|
SU1643338A1 |
| Грузоподъемная площадка крана-штабелера | 1979 |
|
SU800069A1 |
| Грузоподъемная площадка крана-штабелера | 1985 |
|
SU1283199A1 |
| Транспортно-накопительная система | 1984 |
|
SU1222502A1 |
| Устройство для перегрузки пакетированных грузов | 1988 |
|
SU1643340A1 |
| Кран-штабелер | 1972 |
|
SU742305A1 |
Изобретение относится к складскому оборудованию. Цель изобретения - упрощение конструкции и повышение коэффициента использования объема. Склад содержит стеллажи 2, краны - штабелеры 3, перегрузочное устройство 5 с пакетирую- ш,им механизмом, подъемники 6 и отводящий конвейер 7. Шины центрируют и зажимают в блоке подъемников 6. При подходе к подъемникам 6 платформы перегрузочного устройства 5 штыревой захват выдвигается и входит в отверстия шин, установленных на каретки пакетирующего механизма. При возврате штыревого захвата в исходное положение каретки сближаются, шины поджимаются и платформа устройства 5 с пакетом шин перемешается на позицию загрузки, с которой шины захватываются раздвоенным захватным штырем 17 телескопических грузозахватов крана - штабе- лера 3. Штырь 17 установлен параллельно проезду крана-штабелера. Пакет шин снимается со штыревого захвата перегрузочного устройства 5 на штырь 17 крана- штабелера 3. Затем кран-штабелер 3 перемещается до определенной ячейки, где происходит его останов. Телескопические грузо- захваты выдвигаются, пакет шин устанав- ливается на продольные полки. Штырь 17 выдвигается из пакета, шин, грузозахваты /Л занимают исходное положение. Подача шин возможна непосредственно из зоны загрузки t на конвейер, минуя склад. Подъемники 6 поднимают шины .для перегрузки на кон- S вейер. 1 з.п. ф-лы, 5 ил. V О 4: Nj со фиг.1
г / ,
1/ Зв 37 33
Фиа.2
гб
| Совершенствование механизации и автоматизации складов тарно-штучных и сыпучих грузов | |||
| - Обзорная информация, ЦНИИТЭИМС, сер | |||
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Печь-кухня, могущая работать, как самостоятельно, так и в комбинации с разного рода нагревательными приборами | 1921 |
|
SU10A1 |
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
