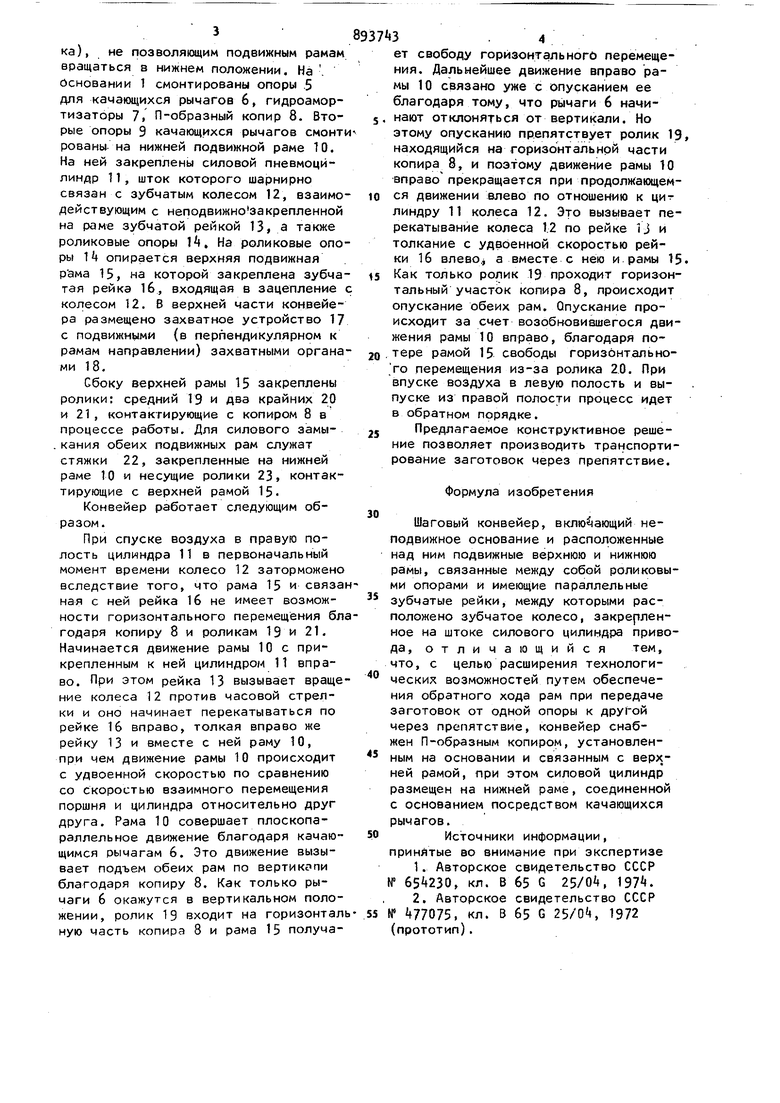
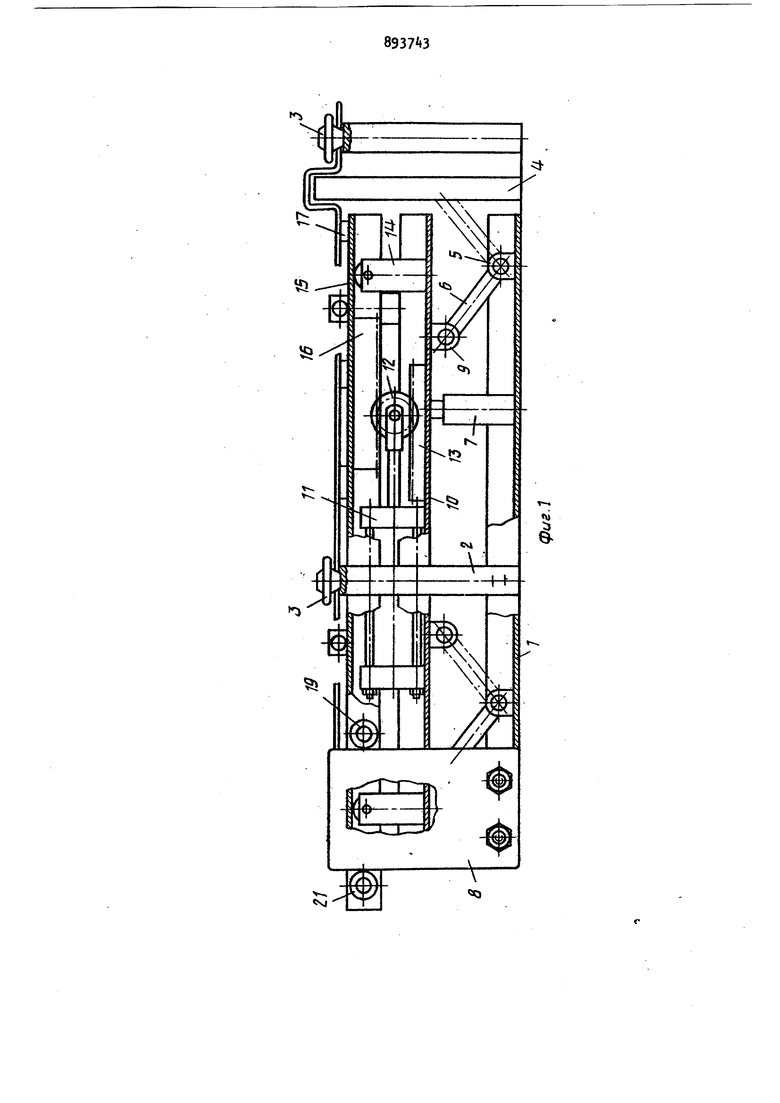
Изобретение относится к подъемнотранспор.тному машиностроению, а именно к шаговым конвейерам, и может быть использовано для перемещения штучных грузов 8 различных отраслях промышленности. Известен шаговый конвейер, содержа щий подвижную и неподвижную рамы, приводы вертикального и горизонтального перемещения, зону накопления, рёзмещенную перед зоной транспортировки С 11. Наиболее близким техническим решением к предлагаемому является шаговый конвейер, включающий неподвижное основание и расположенные над ним подвижные верхнюю и нижнюю рамы, связанные между собой роликовыми опорами и имеющими параллельные зубчатые рейки, между которыми расположено зубчатое колесо.23. Недостатком известного технического решения является то, что обратный ход подвижных рам невозможен при наличии между опорами для заготовок препятствия. Цель изобретения - расширение технологических возможностей путем обеспечения обратного хода рам при передаче заготовок от одной опоры к другой через препятствие. Поставленная цель достигается тем, что конвейер снабжен П-образным копиром, установленным на основании и связанным с верхней рамой, при этом силовой цилиндр размещен на нижней раме, соединенной с основанием посредством качающихся рычагов. На фиг. 1 изображен сборочный чертеж конвейера; на фиг. 2 - то же, вид сверху. Конвейер состоит из неподвижного основания 1, выполненного из швеллеров со стойками-опорами 2, -на кото- . рых размещены перемещаемые заготовки 3, причем последняя стойка-опора 2 находится за препятствием k (например линейка грейферного перекладчика), не позволяющим подвижным рамам вращаться в нижнем положении. На . Основании 1 смонтированы опоры .5 для качающихся рычагов 6, гидроамортизаторы 7( П-образный копир 8. Вторые опоры 9 качающихся рычагов смонт рованы на нижней подвижной раме 10. На ней закреплены силовой пневмоцйлиндр 11, шток которого шарнирно связан с зубчатым колесом 12, взаимо действующим с неподвижнозакрепленной на раме зубчатой рейкой 13| а также роликовые опоры И, На роликовые опо ры 1 i опирается верхняя подвижная рама 15, на которой закреплена зубча тая рейка 1б, входящая в зацепление колесом 12. В верхней части конвейера размещено захватное устройство 17 с подвижными {в перпендикулярном к рамам направлении) захватными органа ми 18. Сбоку верхней рамы 15 закреплены ролики: средний 19 и два крайних 20 и 21, контактирующие с копиром 8 в процессе работы. Для силового замы.кания обеих подвижных рам служат стяжки 22, закрепленные на нижней раме 10 и несущие ролики 23, контактирующие с верхней рамой 15. Конвейер работает следующим образом. При спуске воздуха в правую полость цилиндра 11 в первоначальный момент времени колесо 12 заторможено вследствие того, что рама 15 и связа ная с ней рейка 16 не имеет возможности горизонтального перемещения бл годаря копиру 8 и роликам 19 и 21. Начинается движение рамы 10 с прикрепленным к ней цилиндром 11 вправо. При этом рейка 13 вызывает враще ние колеса 12 против часовой стрелки и оно начинает перекатываться по рейке 16 вправо, толкая вправо же рейку 13 и вместе с ней раму 10, при чем движение рамы 10 происходит с удвоенной скоростью по сравнению со скоростью взаимного перемещения поршня и цилиндра относительно друг друга. Рама 10 совершает плоскопараллельное движение благодаря качающимся рычагам 6. Это движение вызывает подъем обеих рам по вертикопи благодаря копиру 8. Как только рычаги 6 окажутся в вертикальном положении, ролик 19 входит на горизонтал ную часть копира 8 и рама 15 получа3 . 4 ет свободу горизонтального перемещения. Дальнейшее движение вправо рамы 10 связано уже с опусканием ее благодаря тому, что рычаги 6 начинают отклоняться от вертикали. Но этому опусканию препятствует ролик 19, находящийся на горизонтальной части копира 8, и поэтому движение рамы 10 вправо прекращается при продолжающемся движении влево по отношению к циг линдру 11 колеса 12. Это вызывает перекатывание колеса 1.2 по рейке 1J и толкание с удвоенной скоростью рейки 16 влево, а вместе с нею и рамы 15. Как только ролик 19 проходит горизонтальный участок копира 8, происходит опускание обеих рам. Опускание происходит за счет возобновившегося движения рамы 10 вправо, благодаря потере рамой 15 свободы горизонтального перемещения из-за ролика 20. При впуске воздуха в левую полость и выпуске из правой полости процесс идет в обратном порядке. Предлагаемое конструктивное решение позволяет производить транспортирование заготовок через препятствие. Формула изобретения Шаговый конвейер, включающий неподвижное основание и расположенные над ним подвижные верхнюю и нижнюю рамы, связанные между собой роликовыми опорами и имеющие параллельные зубчатые рейки, между которыми расположено зубчатое колесо, закрерленное на штоке силового цилиндра привода, отличающийся тем, что, с целью расширения технологических возможностей путем обеспечения обратного хода рам при передаче заготовок от одной опоры к другой через препятствие, конвейер снабжен П-образным копиром, установленным на основании и связанным с рамой, при этом силовой цилиндр размещен на нижней раме, соединенной с основанием посредством качающихся рычагов. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № , кл. В 65 G 25/0, 197. 2.Авторское свидетельство СССР № , кл. В б5 G , 1972 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Поточная линия для обработки изделий | 1982 |
|
SU1081101A1 |
| Автоматическая линия спутникового типа | 1991 |
|
SU1784445A1 |
| Цепной привод шаговой подачи заготовок в рабочую зону обрабатывающей машины | 1985 |
|
SU1268255A1 |
| АГРЕГАТ ДЛЯ НЕПРЕРЫВНОГО ИЗГОТОВЛЕНИЯ МАКАНЫХ РЕЗИНОВЫХ ИЗДЕЛИЙ | 1967 |
|
SU223298A1 |
| Шагающий конвейер БНЧ-2 | 1982 |
|
SU1090638A1 |
| Манипулятор для замены погружного стакана на слябовой машине непрерывного литья заготовок | 2016 |
|
RU2639089C2 |
| АГРЕГАТ КАРУСЕЛЬНОГО ТИПА ДЛЯ ИЗГОТОВЛЕНИЯ РЕЗИНОВЫХ ИЗДЕЛИЙ | 1967 |
|
SU204540A1 |
| Устройство для укладки в тару стержнеобразных предметов | 1982 |
|
SU1076360A1 |
| Автоматическая линия для изготовления деталей типа топоров | 1989 |
|
SU1727945A1 |
| АВТОМАТИЗИРОВАННОЕ МНОГОЯРУСНОЕ УСТРОЙСТВО | 1993 |
|
RU2043277C1 |
N
N
S
-{(00)
/
